基于差商法的旋转弹丸磁测滚转角解算方法研究
2018-07-04于纪言
谢 洋,于纪言
(南京理工大学 智能弹药技术国防重点学科实验室, 南京 210094)
地磁场是地球的天然磁场,可利用捷联在弹体内的地磁传感器对其进行姿态解算。高旋弹丸的滚转角测量环境为:高发射过载、高转速、小体积。目前,常用的陀螺传感器无法应用于该恶劣的测量环境中。相反,地磁传感器具有高灵敏度、小体积、抗高发射过载和解算误差不随时间累积等优点。因此,地磁传感器能够完美应用于高旋弹丸的滚转角解算[1-3]。
弹体滚转角是炮弹导航信息中的重要信息之一,高旋弹丸滚转角解算精度依赖于磁测量数据精度和滚转角解算方法。在磁测数据处理方面,Changey S.等[4]采用扩展卡尔曼滤波方法对磁测量数据处理,该方法预测精度高达毫弧度。Huang Yu等[5]提出了双通道追踪微分滤波器方法(TD),该方法能够有效抑制随机噪声干扰。Jiangliang Zhu等[6]使用积分比率法解算弹体姿态角,与极值比值法相比,姿态角的解算误差降低90%左右。弹体姿态角解算方法包括零交叉法、三轴正交法和极值比值法。Thomas Harkins等[7-8]采用双轴非正交地磁传感器解算得到弹体滚转角。Xiang Chao等[9]将三种弹体姿态角解算方法进行了对比分析,仿真结果表明三种方法具有相同的解算精度,但是有不同的更新频率。
虽然滤波算法对磁测量数据处理后,能保证一定的解算精度,但是滤波算法复杂、计算时间长、需要处理的地磁数据量大。然而炮弹空间有限,弹载计算能力不足,使用滤波算法无法满足弹上实时处理磁测量数据的要求。Xiang Chao等人解算弹体姿态角的方法,虽然能应用于工程实践,但是只有在特殊点位置才能解算出弹体滚转角,无法在任意时刻解算弹体滚转角。
基于以上问题,本文提出了差商法解算弹体滚转角,该方法不仅原理简单、计算量小、不需要提前校正地磁传感器、在一个滚转周期的任意位置都能进行解算,而且该方法对传感器刻度因子误差和固定偏差具有很强的鲁棒性,仅需要单轴的硬件滤波信号就能解算弹体滚转角。
1 传统二维平面滚转角解算方法
1.1 弹体坐标变换
采用地磁测量弹丸滚转角时,捷联于弹体内部的地磁传感器敏感方向与弹体坐标轴方向一致,并利用测量所得的地磁信息进行弹体姿态解算。坐标轴定义如图1所示。
图1中坐标系osxyz为弹体坐标系,坐标系ox1y1z1为发射坐标系,坐标系osx2y2z2为弹轴坐标系,θ、φ、γ分别为弹体俯仰角、偏航角和滚转角。
发射坐标系和弹轴坐标系间的转换关系为
(1)
(2)
弹轴坐标系和弹体坐标系的转换关系为
(3)

1.2 传统滚转角解算模型
在弹体的滚转平面内,地磁矢量在弹径平面的分矢量为Bc,其分矢量在弹轴坐标系中的量测值为By2和Bz2,在弹体坐标系中的量测值为by和bz,如图2所示。则弹体滚转角的计算公式为:
(4)
式中by和bz为地磁传感器敏感轴的测量量,By2和Bz2由公式和计算得到。
2 差商法解算弹体滚转角
2.1 地磁传感器y轴输出模型
在图2中,γB为地磁场分矢量Bc与y2轴方向的夹角,在旋转弹丸飞行过程中,γB随着弹体俯仰角和偏航角的变化而变化。与旋转弹丸的滚转速率相比,俯仰角速率和偏航角速率相对较小。因此,假设在弹丸的一个滚转周期内,弹丸的俯仰角和偏航角保持不变,同时γB也保持不变。根据GPS测量数据或者先验弹道数据,获取弹体俯仰角和偏航角,根据公式得到γB的表达式
γB=arctan(P)
(5)
其中,
(6)
弹丸滚转一周,地磁传感器y轴方向的地磁分量大小的表达式为
by=Bccos(γ-γB)
(7)
在弹载磁测量环境下,磁场测量误差包括磁场敏感方向刻度因子误差、传感器的固定偏差和测量噪声带来的随机偏差[10]。当只考虑前两种测量误差时,将公式改写为
by=kyBccos(γ-γB)+bs
(8)
式(8)中,ky表示地磁传感器y轴方向的刻度因子误差,bs表示地磁传感器的固定偏差。
2.2 滚转角解算模型
在弹丸滚转过程中,地磁传感器y轴测量输出量如图 3所示,在第i个滚转周期的t1时刻,假设弹体滚转角为γ。在t1时刻之前取两点,分别记为t2时刻和t3时刻。其中,t2时刻与t1时刻滚转角相差Δγ1,t3时刻与t1时刻滚转角相差Δγ2。在t1、t2、t3时刻,地磁传感器y轴测量输出量分别记为by1、by2、by3,其表达式为
(9)
为了消除磁场敏感方向刻度因子误差和传感器固定偏差对滚转角解算带来的影响,将t1时刻的测量值分别减去t2和t3时刻的测量值,然后将两个差值作商。得到下列公式
(10)
γ=arctan(Q)+γB
(11)
其中:
(12)
由式(11)和式(12)可知,t1时刻的滚转角γ只与M、γB、Δγ1、Δγ2相关,与磁场敏感方向刻度因子和传感器固定偏差无关。一个M值对应两个数学解,然而滚转角却为唯一解。因此,使用以下方法判定滚转角的解:
当by1>0且Q>0时,γ-γB=arctan(Q);
当by1>0且Q<0时,γ-γB=arctan(Q);
当by1<0且Q>0时,γ-γB=arctan(Q)-π;
当by1<0且Q<0时,γ-γB=arctan(Q)+π;
在滚转角的求解过程中,量测值by受到一定的干扰,在by过零点附近,测量值与实际值会出现异号的情况,如果使用上述方法判定弹体滚转角的值,解算结果与真实值可能存在π的误差。为了避免这种情况的产生,首先将第i个滚转角的值与第i-1个滚转角的值相减,得到滚转角的差值α=|γi-γi-1|。如果其差值α∈(2π/3,4π/3),则判定第i个滚转角值为异常点。然后通过下面方法补偿得到弹体滚转角:
如果by1>0且Q>0时,则γ-γB=arctan(Q)-π;
如果by1>0且Q<0时,则γ-γB=arctan(Q)+π;
如果by1<0且Q>0时,则γ-γB=arctan(Q)+π;
如果by1<0且Q<0时,则γ-γB=arctan(Q)-π;
2.3 滚转角间隔Δγ分析

(13)
(14)
3 仿真分析
3.1 最佳滚转角间隔Δγ分析
在使用公式解算弹体滚转角γ之前,需要提前选取滚转角间隔Δγ。为了得到最佳的解算结果,要选取最佳滚转角间隔Δγ。当俯仰角和偏航角一定,在一个滚转周期(γ∈[0,2π))内,使计算式Δb=by1-by2取得最大值的滚转角间隔Δγ称为最佳的滚转角间隔。
仿真试验中,以南京某地(E118.78°,N32.05°)为中心,以北偏东45°为发射方向,发射系磁场三分量H=[28 323; 24 043; 24 523],取俯仰角为45°、偏航角为-5°。在一个滚转周期(γ∈[0,2π))内,仿真计算最佳滚转角间隔Δγ,仿真结果如图 4所示。从图4可以看出:1) 在一个滚转周期内,Δb在γB和γB+π处取得最大值,在γB±π/2处取得最小值。2) Δb取得最大值时,滚转角间隔Δγ的值为π;Δb取得最小值时,滚转角间隔Δγ的值为π/2或3π/2。3) 当滚转角γ∈(γB-π/2,γB+π/2)和(γB+π/2,γB+3π/2)时,使得Δb取最大值的滚转角间隔Δγ从3π/2降至π/2。
综上所述,在γ=γB±π/2处,为了使Δb能够取得最大值,分别取最佳滚转角间隔Δγ1=π/2、Δγ2=3π/2作为公式中的两个滚转角间隔。
3.2 磁场敏感方向刻度因子产生的解算误差分析
在磁场敏感方向刻度因子产生的解算误差仿真实验中,发射系磁场三分量、俯仰角和偏航角均与3.1节相同。传感器y轴方向的刻度因子分别取0.95、0.85、0.75、0.65,传感器z轴方向的刻度因子取1。分别使用差商法解算滚转角和传统二维滚转角解算方法解算弹体滚转角γ,将解算结果与弹体滚转角的真实结果γt相减,得到任意时刻因刻度因子产生的滚转角解算误差εk,其表达式为
εk=γ-γt
(15)
图5和图6分别为采用差商法和传统方法,使用含传感器刻度因子误差的地磁测量数据,解算弹体滚转角的解算误差。表 1列出了因传感器刻度因子引起的最大滚转角解算误差。结合图5、图6和表1可以看出:1) 随着传感器刻度因子变小,传统方法解算弹体滚转角的解算精度变差,差商法解算精度不变。2) 传统方法解算弹体滚转角精度在1°以上,差商法解算弹体滚转角的解算误差为5.684 3e-14°,此解算误差可为计算机的计算截断误差。
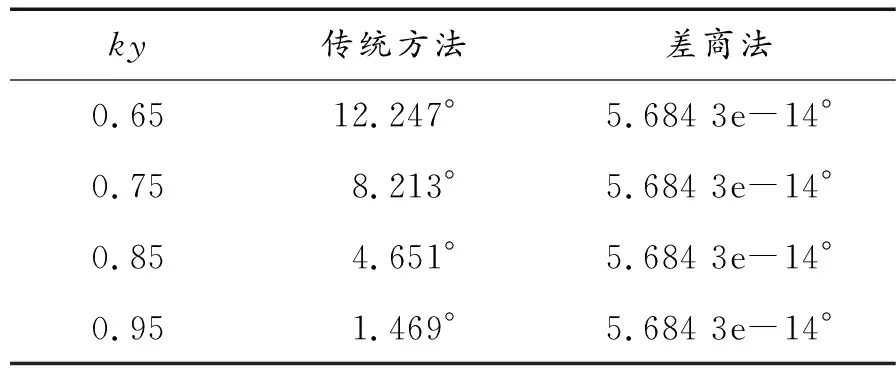
ky传统方法差商法0.6512.247°5.684 3e-14°0.758.213°5.684 3e-14°0.854.651°5.684 3e-14°0.951.469°5.684 3e-14°
由仿真结果表明,与传统二维平面解算滚转角方法相比,由刻度因子产生的磁测量误差对差商法解算弹体滚转角的影响很小,差商法具有很强的鲁棒性。
3.3 传感器的固定偏差产生的解算误差分析
传感器固定偏差给测量值带来一定的误差,在滚转角解算仿真实验中,发射系磁场三分量、俯仰角和偏航角均与3.1节相同。传感器y轴方向的固定偏差分别取1 500 nT、500 nT、-500 nT、-1 500 nT,传感器z轴方向的固定偏差为0 nT。分别使用差商法解算滚转角和传统二维平面方法解算滚转角γ,将解算结果与真实弹体滚转角γt相减,得到任意时刻因传感器固定偏差产生的滚转角解算误差εb,其表达式为
εb=γ-γt
(16)
图7和图8分别为采用差商法和传统方法,使用含传感器固定偏差的地磁测量数据,解算弹体滚转角的解算误差。表2列出了因传感器固定偏差引起的最大滚转角解算误差。结合图7、图8和表2可以看出:1) 传感器的固定偏差越大,传统方法的解算精度越差,其解算精度与固定偏差的正负无关,只与固定偏差的大小相关。2) 差商法解算弹体滚转角的精度与固定偏差的大小和正负均无关。3) 传统方法解算弹体滚转角精度在4°以上,差商法解算弹体滚转角的解算误差为5.684 3e-14°。
由仿真结果表明,与传统二维平面解算滚转角方法相比,由传感器固定偏差产生的磁测量误差对差商法解算弹体滚转角的影响很小,差商法具有很强的鲁棒性。

Kb/nT传统方法差商法1 5006.180°5.684 3e-14°5004.019°5.684 3e-14°-5004.019°5.684 3e-14°-1 5006.180°5.684 3e-14°
3.4 滚转角间隔Δγ 的误差对解算结果的影响

4 结论
本文介绍了传统二维平面滚转角解算原理和差商法解算弹体滚转角原理。首先,对最佳滚转角间隔的选取进行了仿真分析,然后分别对传感器刻度因子误差和传感器固定偏差对弹体滚转角的解算误差进行了分析,通过对比两种方法对滚转角解算造成的影响,得到以下结论:
1) 利用差商法解算弹体滚转角,其滚转角解算误差约为1×10-13°,小于1°;当滚转角间隔为π/2或3π/2时,能使解算误差达到最小。
2) 利用差商法对刻度因子误差和固定偏差引起的解算误差具有很强的鲁棒性。随着滚转角间隔Δγ误差εΔγ的增大,最大弹体滚转角解算误差εγ也随之增大。
3) 本文旨在提高旋转弹丸磁测滚转角解算精度,当地磁传感器存在一定的刻度因子误差和固定偏差时,差商法解算弹体滚转角具有很强的鲁棒性。除了传感器的刻度因子误差和固定偏差需要考虑外,传感器的测量噪声对此方法的解算精度造成的影响有待进一步研究。
[1] LI Ding,BU Xiongzhu.Attitude measurement on high-spinning projectile using magnetic sensors and accelerometers[J].Trans Nanjing Univ Aeronaut Astronaut,2008,25(2).
[2] LI Xiang,LI Zhi.A new calibration method for tri-axial field sensors in strap-down navigation systems[J].Meas Sci Technol,2012,23:2852-5.
[3] LONG D F,LIN J,ZHANG X M,LI J.Orientation estimation algorithm applied to high-spin projectiles[J].Meas Sci Technol,2014,25:233-43.
[4] CHANGEY S,FLECK V,BEAUVOIS D.Projectile attitude and position determination using magnetic meter sensor only[C]//Proceeding of SPIE-The International Society for Optical Engineering,2005,5803:49-58.
[5] HUANG Yu,WANG Honglun.Application of tracking-differentiator in angular measurements on spinning projectiles using magnetic sensors[C].International Conference on Intelligent Human-Machine Systems and Cybernetics.IEEE,2015,25:433-436.
[6] ZHU Jianliang,WU Panlong,BO Yuming.A Novel Attitude Estimation Algorithm Based on the Non-Orthogonal Magnetic Sensors[J].Sensors,2016,16(5):730.
[7] HARKINS THOMAS,DAVIS BRADFORD,HEPNER DAVID.Novel on-board sensor systems for making angular measurements on spinning projectiles[C].Proc Spie,2001,4365:106-112.
[8] HEPNER DAVID,HARKINS THOMAS.Determining inertial orientation of a spinning body with body-fixed sensors[C].Spie Proceedings,2000:68-79.
[9] XIANG Chao,BU Xiongzhu,YANG Bo.Three Different Attitude Measurements of Spinning Projectile Based on Magnetic Sensors[J].Measurement,2014,47:331-340.
