工业机器人实训课程的虚拟仿真教学研究
2018-07-03郝翠霞
郝翠霞, 叶 晖
(1. 南京工业职业技术学院 电气工程学院, 南京 210023; 2. 上海ABB工程有限公司, 上海 201319)
工业机器人越来越广泛地应用在生产和生活领域,国内市场对工业机器人的需求逐年提高。为满足国家对工业机器人职业技能人才的需要,许多高校(特别是高职院校)开设了工业机器人专业和课程。但是工业机器人系统昂贵,实训设备维护成本高,且数量难以满足实训教学的需要。因此,将虚拟仿真技术应用在工业机器人实训课程教学中尤为必要[1-3]。
世界各机器人开发商都有各自的产品型号和对应软件,但相互不开放。Robotstudio是ABB公司开发的优秀的机器人仿真软件,是当前工业机器人领域应用广泛的软件平台[4-6]。本文所述机器人实训项目即选用Robotstudio作为虚拟仿真实训平台进行开发。
在Robotstudio软件中,可以像用实际示教器对机器人进行操作和编程一样,用虚拟示教器对机器人进行操作和编程;可以仿真实际工业机器人工作站进行方案的设计和验证。机器人程序无需任何转换便可直接下载到实际机器人系统中[7];可以导入第三方主流建模软件搭建的模型,使用户能够在Windows环境中离线开发或维护机器人程序,显著缩短编程时间、改进程序结构。
1 实训课程教学规划
实训课程的课时设定1周,设置有4个机器人实训项目,星期一—星期四每天训练1个实训项目,星期五设为收尾和验证时间。有真实工业机器人系统的学校可以把仿真项目拿到现场实训设备上验证,实训效果更好。南京工业职业技术学院对机器人实训项目进行了详细规划。
1.1 工业机器人涂胶仿真实训项目
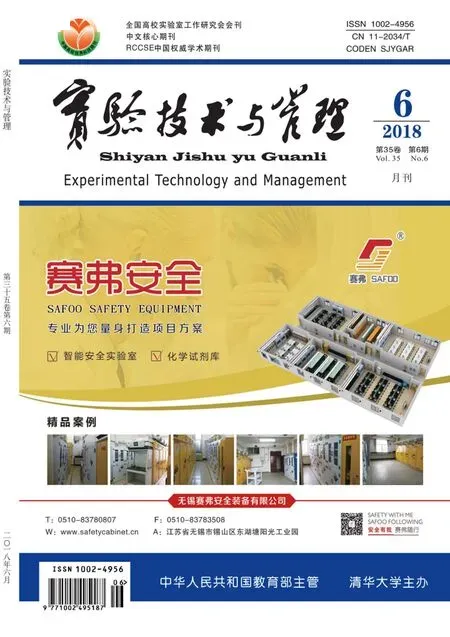
工业机器人涂胶仿真实训工作站布局如图1所示[8],选取的工业机器人型号为IRB2600。该工作站的突出特点是工业机器人对工件的4个直线边缘进行涂胶作业。学生通过此仿真项目的训练,将掌握工业机器人沿规则路径工作的编程技巧,并学习采用示教指令的方法设计涂胶路径。
通过这个仿真项目,学生还能得到虚拟仿真的方法及其应用训练,包括Robotstudio的操作、工作站的开发流程等。具体实训内容包括:
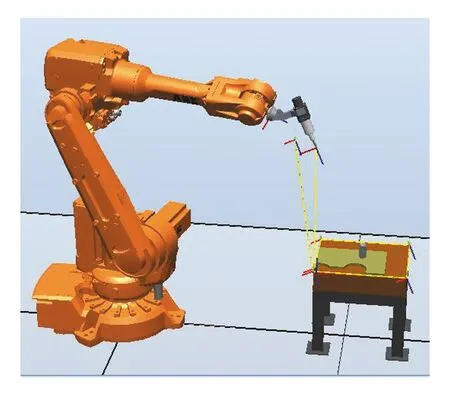
图1 涂胶工作站布局
(1) 创建工业机器人工作站和系统;
(2) 手动操纵机器人;
(3) 建立工业机器人工件坐标;
(4) 为工业机器人安装工具;
(5) 设定运动指令参数;
(6) 创建工业机器人运动轨迹程序;
(7) 仿真设定,仿真运行机器人轨迹;
(8) 将机器人仿真效果制作成exe可执行文件;
(9) 工作站的打包、解包等。
该项目的训练为其他项目实训奠定了基础。
1.2 工业机器人激光切割仿真实训项目
工业机器人激光切割仿真实训项目安排在机器人涂胶仿真实训项目训练之后进行,工作站布局如图2所示[8],选取的工业机器人型号为IRB2600。在该项目中,要让工业机器人对不规则曲线进行激光切割操作。本工作站的教学重点是对不规则曲线采用自动生成路径的方法设定激光切割仿真路径。通过此项目的训练,要求学生掌握工业机器人沿不规则路径运行的仿真方法。
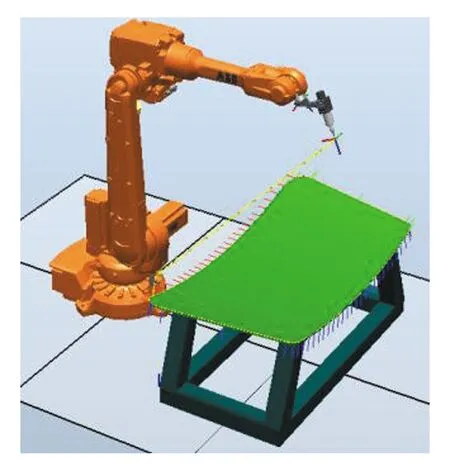
图2 激光切割工作站布局
该仿真项目实训的知识点还有:(1)创建机器人激光切割曲线;(2)自动生成机器人激光切割路径;(3)机器人目标点调整;(4)轴配置参数调整;(5)完善程序等。
通过以上两个实训项目,对学生进行工业机器人不同运动路径的仿真训练。
1.3 工业机器人搬运动作仿真实训项目
工业机器人搬运动作仿真实训项目的工作站布局如图3所示,选取的工业机器人型号为IRB460。工业机器人要完成的工作是用吸盘工具把输送链上的产品搬移到旁边的垛板上。此工作站的仿真,既要实现机器人按路径行走,又要利用工具吸附产品和释放产品。定义动作信号、应用动作指令和逻辑指令对机器人的吸附和释放动作进行仿真,是该项目训练的重点。
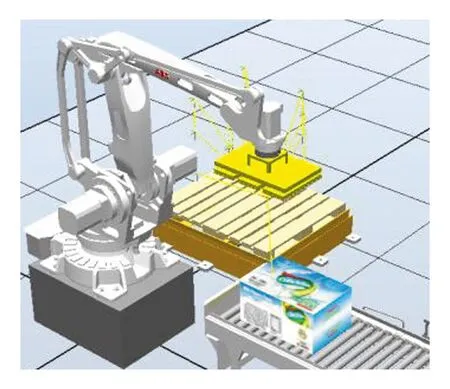
图3 搬运工作站布局
该仿真项目的训练内容有:(1)布局工作站;(2)创建工具;(3)用Robotstudio的建模功能建模;(4)定义配置编辑器;(5)设置事件管理器;(6)设计搬运工件的路径;(7)Set、Reset、WaitTime等逻辑指令的应用。
通过前3个项目的训练,要求学生掌握工业机器人的运动路径仿真和动作仿真的处理方法,即掌握基本的工业机器人应用仿真的编程方法。
1.4 工业机器人弧焊作业仿真实训项目
工业机器人弧焊作业仿真实训项目工作站布局如图4所示[8],选取的工业机器人型号为IRB2600,变位机的型号为IRBP A。工业机器人在变位机的配合下,对装在变位机上的零件进行弧焊作业,具体工作步骤是:变位机一轴转动90°,把零件上的圆孔放平,机器人弧焊大孔的一面,变位机二轴旋转180°,弧焊小孔的另一面。可根据实训的进度,继续完成大、小孔剩下一面的弧焊。
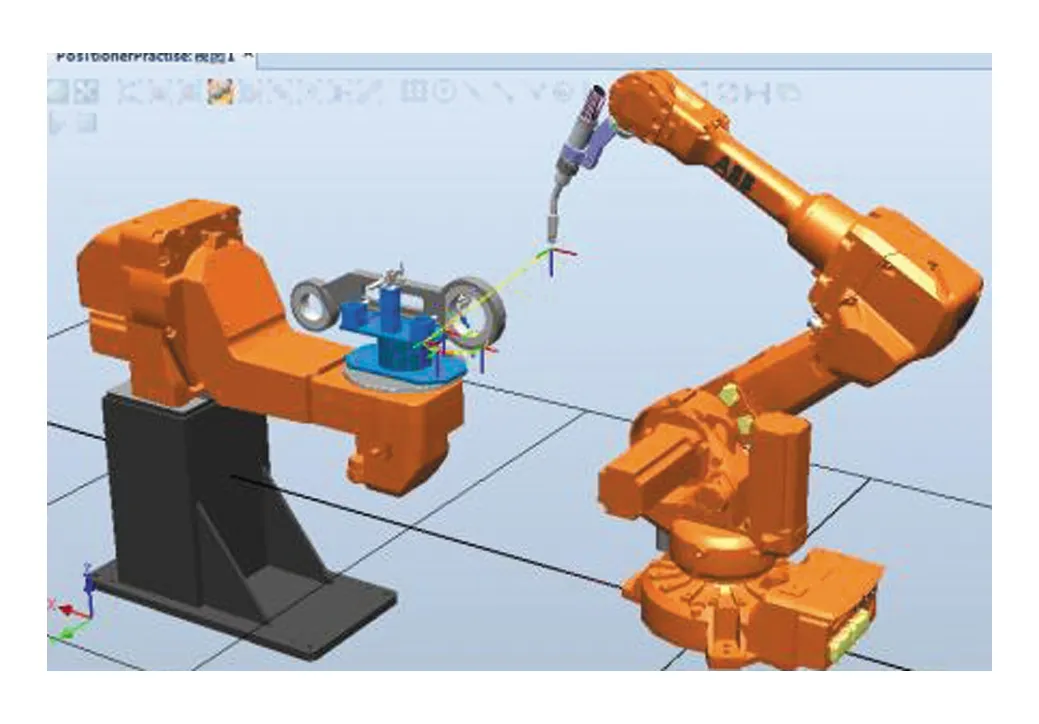
图4 弧焊工作站布局
本仿真实训的重点:一是变位机的应用;二是采用示教目标点的方法生成弧焊路径;三是在生成的路径中,根据实际情况把MoveJ或MoveL指令转换为MoveC指令。
实训项目的主要内容有:(1)构建焊接机器人工作环境;(2)建立模型;(3)变位机的导入与激活;(4)在变位机上安装工件;(5)多路径的添加及执行顺序的调整等。
本仿真项目的训练,除了工业机器人本体的仿真外,增加了外围设备的仿真处理方法。
以上4个实训项目的安排由易到难,所用的方法和训练的知识点各有侧重,选取的是工业机器人应用的典型案例,训练点均包含Robotstudio的基础应用。当学生顺序完成4个仿真实训项目后,还可进行项目的横向扩展和纵向扩展,将自己的仿真项目拿到实际设备中进行验证。
2 实训条件与效果
实施工业机器人课程的虚拟仿真实训教学方案的前提是建立一个装有Robotstudio软件的网络实训室,计算机的数量和实训学生的数量相匹配。如果教师机装有多媒体网络软件,教师可以方便地利用网络教学平台完成各种基于多媒体技术的教学活动,例如教师在教师机讲述虚拟工作站的开发过程并广播到每一台学生机上,也可在教师机上查看每位学生开发仿真项目的过程和结果等。
该工业机器人实训教学方案在我校机械工程学院机电一体化专业的3届学生实训教学中得到应用,收到了很好的实训效果,大大提高了学生参加实训的兴趣和成就感,激发了学生的学习积极性及创新思维,有利于学生的创新实践活动[9],也激发了教师进行虚拟仿真实训教学的积极性。
实践表明,虚拟仿真编程、调试工作站的虚拟仿真实训能给予学生充足的纠错空间,学生能够就关键技术要点在软件中进行反复练习,从而大大减少初学者因对工业机器人的不熟练操作而对设备造成损坏,也较好地解决了实训设备和经费不足的问题,降低了实训成本[10],提高了实操训练的效率。
3 结语
基于虚拟仿真技术的工业机器人实训项目既可横向拓展项目的内容,也可以纵向增加具有新知识点的新项目,实训项目的开发弹性比较大。即使是在没有任何硬件实训条件的学校也可以实施;有硬件设备但数量远远和学生数不匹配的学校,实训的效果更是理想。由于在软件中建立的虚拟工作站和实际工作站完全对应,每位学生都能充分体验到每个项目的开发流程,解决了真实实训系统不足的困境。在软件中仿真、在硬件设备上验证的实训教学方法大大减少了现场编程的时间[11-12]。
需要注意的是:Robotstudio软件版本更新非常快,平均一个月就会升级一个版本,要想用上Robotstudio的最新功能,则仿真实训室的软件需要不断跟随更新。
[1] 隋欣.《ABB工业机器人仿真》教学设计:基于RobotStudio[J].现代商贸工业,2016(31):167-168.
[2] 郭黎丽.对工业机器人应用技术专业实训基地建设的探索与实践[J].电子测量技术,2013(9):124-126.
[3] 卢宝常.仿真教学在在职业学校汽车实训课程中的应用研究[J].教育现代化,2017(20):147-148.
[4] 魏雄冬.工业机器人应用系列教学实训设备的开发与项目设计研究[J].自动化应用,2017(7):64-65,69.
[5] 刘振宇,郝明,赵彬,等.工业机器人在线仿真系统研究[J].微型机与应用,2014(6):84-86,91.
[6] 潘洪坤.基于ABB工业机器人示教系统的教学项目设计[J].山东工业技术,2017(8):244-245.
[7] 鲁鹏,张有博,谷明信,等.基于RobotStudio的工业机器人虚拟仿真实验室的构建[J].机电技术,2015(4):152-155.
[8] 叶晖.工业机器人工程应用虚拟仿真教程[M].北京:机械工业出版社,2014.
[9] 邸馗,于天彪,陈培媛,等.虚拟现实技术在机械工程实验教学中的应用[J].实验技术与管理,2014,31(10):10-12.
[10] 郭爱云,帅伟,熊家慧.虚拟仿真技术在机电设备装调技术实训课程教学改革中的应用[J].教育现代化,2017(20):219-220,222.
[11] 管菊花,邓艳菲.基于RobotStudio焊接工业机器人虚拟工作站[J].南方农机,2017(13):122-124.
[12] 戴黄峰.码垛教学在ABB工业机器人的教学应用[J].职业,2017(20):69-70.