基于过街人数分布的路段机动车延误经验模型*
2018-07-03慈玉生郑淑妮赵韩涛
慈玉生,郑淑妮,赵韩涛
(1.哈尔滨工业大学 交通科学与工程学院,黑龙江 哈尔滨 150090;2.哈尔滨工业大学(威海) 汽车工程学院,山东 威海 264209)
0 引 言
行人过街时与机动车之间相互干扰,并且其过街的无序性造成了车辆不必要的变速、停车、绕行。研究路段机动车与行人的冲突问题,可为路段是否设置行人过街设施提供参考依据。
目前国内外已有学者对人车冲突问题进行了研究,陈永恒等[1]探讨了右转车与行人的冲突,分析不同车流量状态下,行人的可穿越机动车概率,同时考虑了车辆可穿越行人流概率,并提出两者延误模型。贾海亮等[2]提出在不同流量下路段机动车延误模型,并从路段交通流量很小、较大、很大3方面定性和定量对行人过街与机动车的冲突进行了研究。冯树民等[3]分析了自由过街、无控制人行横道、信号控制人行横道3种情况的机动车延误。余艳[4]则通过元胞自动机对人车冲突进行了仿真。周雪峰、孙泽、李珊珊、沈家军、廖明军等[5-9]研究了人车冲突机理。郑长江等[10]对行人过街时间进行了研究。T.ROSENBLOOM[11]通过研究认为行人与机动车产生冲突,通行的优先权取决于机动车;当机动车速度高,大部分行人选择观望,而同时机动车会在人行横道一定距离处调整车速。目前人车冲突研究侧重于行人过街的安全性以及冲突机理研究[12-13],缺乏从行人流量的角度对路段机动车影响的直观研究,因此笔者从行人过街人数的角度,探讨行人穿越道路对机动车造成的延误影响。
笔者以双向四车道城市道路路段为例,对机动车产生的延误进行分析,通过调查发现机动车延误与过街人数紧密相关,拟通过理论建模、实验调查验证等手段研究探讨两者之间的定量关系。
1 路段人车冲突条件及避让方式
1.1 相关变量
假定某条东西向路段单车道宽为Lm(m),车道2η条,且η≥1,η∈N。图1中以双向四车道η=2为例,机动车与人行横道距离为Lb(m),并假设机动车位于车道中心线行驶,与车道两侧边缘距离为La(m)。此外,设定行人过街步行速度va(m/s);机动车行驶速度vb(m/s)。
图1 路段行人过街横道处人车冲突示意Fig. 1 Conflict between vehicle and pedestrian at crosswalk
1.2 人车冲突条件
机动车遇到前方行人过街时,首先要判断在其到达人行横道处之前,行人能否到达车辆正前方的人行横道处,即图1所示阴影部分的冲突区域。分析如下:
对于机动车而言,以正常速度行驶至冲突位置所需时间为
(1)
对于过街行人而言,行人距离冲突区两侧边缘距离分别为λ、λ+Lm-2La,可推算得到行人通过该冲突区的时间为
(2)
当机动车到达冲突位置的时间与行人通过冲突区的时间产生矛盾,两者产生冲突。即
(3)
综上所述,可得到城市道路路段发生人车冲突条件为
(4)
1.3 行人避让分析
行人观察到来车时,首先会通过自身感觉判断是否会与机动车产生冲突,而这种自身感觉的判断依据主要有:机动车的行驶速度、行人的过街速度、一同过街的行人数、车辆与行人的距离以及车辆的避让意识等因素。这些因素对不同行人有着不同的影响,在判断行人本身与机动车的冲突情形后,主要采取以下4种方式过街:
1) 正常通过方式。行人判断与机动车不会产生冲突时,行人会保持匀速前进通过。
2) 驻足停留方式。行人在穿越道路时,观察到路段机动车车速较快、车流量较大,会驻足停留,而此种情形容易误导机动车驾驶员,使机动车驾驶员难以判断行人的行为。
3) 加速通过方式。行人判断出自己加快速度则可能通过道路而避免冲突时,有部分行人会冒险采用加速通过的方式来避免冲突,但由于部分行人是在中途穿过道路的过程中加快速度,因此也会使机动车驾驶员难以判断其行为。
4) 减速通过方式。行人判断出自己减慢速度有可能使机动车先通过人行横道而避免冲突时,部分行人会采取减速通过的方式来避免冲突。
以上是行人过街时为避免冲突常用的4种过街方式,后3种方式由于其行为难以预测,对驾驶员的判断造成影响,因此过街危险性大。
1.4 机动车避让方式
当机动车和过街行人将发生冲突时,机动车为避免冲突,主要采取加速避让、减速避让和停车避让3种避让方式,其中当机动车采取加速避让时,会以更快的速度通过人行横道,其不会产生延误,反而会减小通过时间。因此笔者主要对减速避让以及停车避让两种方式对机动车产生的延误进行分析。
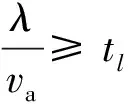
而机动车采用这两种避让方式的概率则与一次过街人数相关。为分析机动车避让方式与过街人数之间的关系,笔者采用视频摄像法对威海市4条城市路段人行横道处进行实地调查,连续5天采集了相关数据,通过视频数据分析得到了过街人数分别在1~10人各自对应的机动车选择的避让方式。为方便统计分析,笔者选取各过街人数对应100辆机动车作为选择方式的概率进行统计。机动车避让方式分布如表1。
表1 实测两种避让方式的车辆数Table 1 Vehicle number of two yield modes from on-site survey
注:S为减速避让方式;P为停车避让方式。
通过数据整理,得到机动车减速避让的概率分布曲线,如图2。
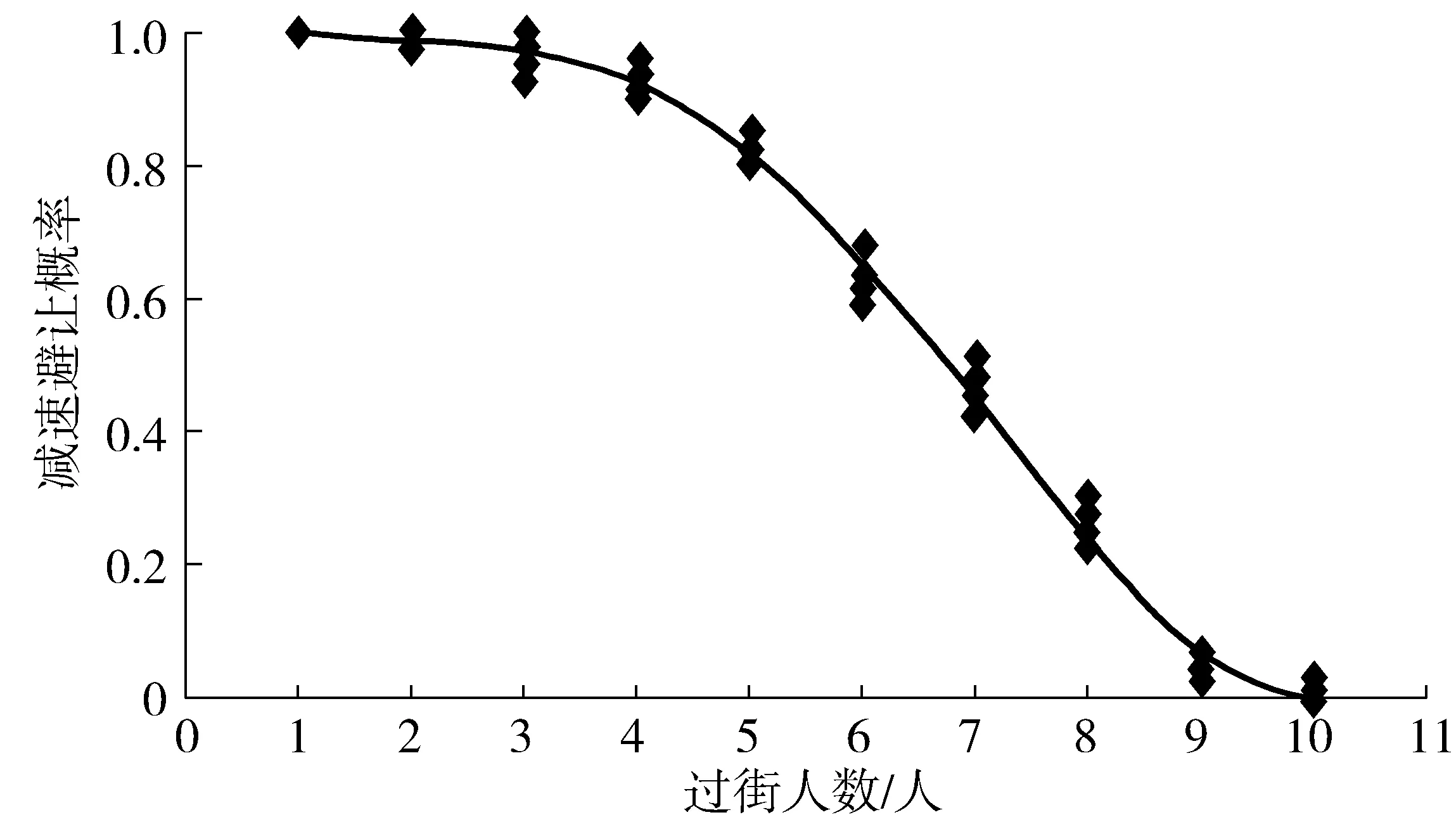
图2 机动车减速避让概率Fig. 2 Yield probability of deceleration for vehicles
当过街人数为9人时,95%的车辆会选择停车避让方式。而当过街人数为10人时,100%的车辆会选择停车避让的方式。由于选择停车避让与减速避让方式的概率之和为1,因此图2中当过街人数大于等于9人时选择减速避让的概率接近0。
选取四次多项式函数来拟合减速避让方式的选择概率和过街人数的关系:
Y=ax4+bx3+cx2+dx+e
(5)
式中:a=0.000 7;b=-0.013 3;c=0.061 7;d=-0.116 6;e=1.069 6;Y为机动车选择减速避让的概率;x为1次过街的人数。
结果显示,机动车在遇到路段无信号控制人行横道处行人过街时,过街人数对机动车采取的避让方式有重要影响;当过街人数在10人以内,两者的函数关系为四次多项式函数关系;而当过街人数大于10人时,四次多项式函数无法满足要求,但通过调查数据得出过街人数在10人时,机动车均会采取停车避让,因此当过街人数大于10人时,可以推断出减速避让方式的选择概率为0。
2 路段机动车延误模型
2.1 机动车减速避让延误
机动车在减速避让过程中先减速行驶等待行人通过,然后再加速至原来行驶速度,过程如图3。
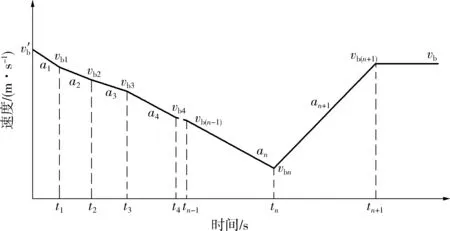
图3 机动车减速避让过程Fig. 3 Deceleration yield process for a vehicle
1) 减速避让过程,根据质点运动学理论,得到机动车减速避让时间为
(6)
式中:n为减速避让阶段数;m、k为减速度下标;am、ak为第m、k减速避让阶段的减速度;l为调查选取分段路段长度,m;tl为各减速阶段的时间。
2) 加速至原先行驶速度的过程,所需时间为
(7)
而假设未采取避让措施,则需要行驶时间为
(8)

(9)
式中:a为此阶段的减速度,与停车避让该阶段的减速度相等;X为此阶段减小的速度。
综上,由延误计算方法d1=tl+tq-tn得到:

(10)
式中:d1表示减速避让的延误值。
2.2 机动车停车避让延误
机动车停车避让过程边观察行人行走状态边减速行驶,最后无法避免人车冲突而被迫或主动停车,如图4。
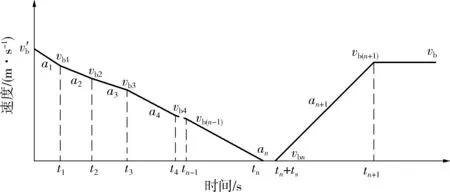
图4 机动车停车避让过程Fig. 4 Stop yield process for a vehicle
1) 减速至停车的过程,所需时间为
(11)
2) 等待行人通过过程,所需时间为
(12)
3) 加速至原先行驶速度的过程,所需时间为
(13)
式中:an+1为加速阶段的加速度。
而假设未采取避让措施,则需要行驶时间为
(14)
由延误计算方法d=tl+ts+tq-tn得到
(15)
式中:d2表示减速避让的延误值。
2.3 基于概率分布的机动车延误模型
前文得到机动车采取不同避让方式的概率与过街人数的函数关系及机动车采取减速避让、停车避让各自的延误模型。笔者提出以两种避让方式的概率作为权重与各自的延误模型相结合的方法,求解与过街人数相关的路段机动车延误,最后通过过街人数推算出机动车的延误:
d=[Y1-Y][d1d2]T,x≤10
d=d2,x>10
(16)
式中:Y、1-Y分别为采取减速避让、停车避让的概率值;d1、d2分别为减速避让、停车避让的机动车延误值。
3 案例分析及验证
为验证本文延误模型的合理性,采用实例进行验证分析。以威海市昆明路家家悦金猴购物广场前方双向四车道路段为例,采用车载GPS行驶记录仪和人工记录相结合的方法,在该路段连续5天7:30~9:30时段,对不同过街人数对应的各车辆延误值进行实测,与基于概率的延误计算方法得出的延误值作比较,并且通过车载GPS行驶记录仪的速度分析得到减速避让有3个阶段。数据处理结果如下。
该路段机动车的正常行驶车速保持在vb=11.1 m/s,在观察到前方人行横道处时即使没有行人通过,机动车减速范围约20%,故X取2.2 m/s,调查中l为9 m。
1) 减速避让

2) 停车避让
两者代入式(16)得到机动车延误。实际调查得到机动车的延误及理论与实际延误,如表2。

表2 机动车理论延误值与实际延误值关系Table 2 Relationship between theoretical delay and actual delay for vehicles
由表2可以看出实际调查所得的机动车延误值与计算得到的理论延误值的相对误差处于0.8%~5.3%范围、平均为3.1%,总体处于可接受范围,可知笔者构建的机动车延误计算方法较为有效。
4 结 论
通过研究,得到如下结论:
1) 分析了城市道路路段无信号控制行人过街设施处人车冲突条件、机动车避让方式及经验概率分布,得知机动车采取避让方式与过街人数紧密相关。
2) 基于质点运动学理论,提出了机动车减速避让和停车避让的延误计算模型。
3) 结合机动车避让延误模型,提出了基于行人过街人数分布的机动车延误模型,该模型引入了过街人数概率分布函数,可以直接通过一次过街人数评估行人过街对路段机动车造成的延误影响。
参考文献(References):
[1] 陈永恒,张虎,曲昭伟,等.信控交叉口提前右转机动车与行人冲突特性[J].西南交通大学学报,2014,49(5):896-903.
CHEN Yongheng,ZHANG Hu,QU Zhaowei,et al.Analysis of conflict characteristic between early right-turning vehicles and pedestrians at signalized intersections[J].JournalofSouthwestJiaotongUniversity,2014,49(5):896-903.
[2] 贾海亮,刘澜.行人穿越道路对路段交通流的影响分析[J].西华大学学报(自然科学版),2013,32(3):90-93.
JIA Hailiang,LIU Lan.The influence of pedestrian cross road section on traffic flow[J].JournalofXihuaUniversity(NaturalScienceEdition),2013,32(3):90-93.
[3] 冯树民,裴玉龙.行人过街条件下道路路段机动车延误分析[J].交通运输系统工程与信息,2007,7(3):73-77.
FENG Shumin,PEI Yulong.Analysis of vehicle delay on road sections under the condition of pedestrian crossing[J].JournalofTransportationSystemsEngineeringandinformationTechnology,2007,7(3):73-77.
[4] 余艳.行人过街和机动车相互干扰的元胞自动机模拟研究[D].桂林:广西师范大学,2012.
YU Yan.StudyonMutualImpactBetweenPedestrianandMotorVehiclesonCellularAutomatonModels[D].Guiling:Guangxi Normal University,2012.
[5] 周雪峰,郑长江.基于博弈论的无控制路段人行横道处人车抢行分析[J].华东交通大学学报,2012,29(6):65-69.
ZHOU Haifeng,ZHENG Changjiang.An analysis of road-grabbing at non-intersection crosswalks without signal control based on game theory[J].JournalofEastChinaJiaotongUniversity,2012,29(6):65-69.
[6] 孙泽,贾斌,李新刚.基于元胞自动机的行人和机动车相互干扰机理研究[J].物理学报,2012,61(10):76-83.
SUN Ze,JIA Bin,LI Xingang.The study of the interference between pedestrian and vehicles based on cellular automaton model[J].ActaPhysicaSinica,2012,61(10):76-83.
[7] 李珊珊.平交路口机动车自行车行人及其相互干扰微观行为模型研究[D].北京:北京交通大学,2013.
LI Shanshan.ResearchontheMicroscopicBehaviorModelsofVehicle,Bicycle,Pedestrian,andTheirInteractiveInterferencesattheSignalizedPlaneIntersection[D].Beijing:Beijing Jiaotong University,2013.
[8] 沈家军,王炜.道路交叉口机动车与行人冲突概率模型研究[J].交通运输系统工程与信息,2011,11(1):152-156.
SHEN Jiajun,WANG Wei.Study on conflict probability motor vehicles and pedestrian at intersections[J].JournalofTransportationSystemsEngineeringandInformationTechnology,2011,11(1):152-156.
[9] 廖明军,李克平,王凯英,等.行人交通微观仿真研究综述[J].武汉理工大学学报(交通科学与工程版),2010,34(1):180-183.
LIAO Mingjun,LI Keping,WANG Kaiying,et al.Review on pedestrian traffic micro-simulation[J].JournalofWuhanUniversityofTechnology(TransportationScience&Engineering),2010,34(1):180-183.
[10] 郑长江,刘峰,黄晓迪.无信号控制路段人行横道行人过街时间研究[J].武汉理工大学学报(交通科学与工程版),2012,36(3):475-478.
ZHENG Changjiang,LIU Feng,HUANG Xiaodi.Research on crossing time on no signal control non-intersection crosswalks[J].JournalofWuhanUniversityofTechnology(TransportationScience&Engineering),2012,36(3):475-478.
[11] ROSENBLOOM T.Sensation seeking and pedestrian crossing compliance[J].SocialBehaviorandPersonality,2006,34 (2),113 -122.
[12] FENG S,CI Y,WU L,et al.Vehicle delay estimation for an isolated intersection under actuated signal control[J].MathematicalProblemsinEngineering,2014(1):1-7.
[13] SCHMIST S,FARBER B.Pedestrians at the kerb-recognising the action intentions of humans[J].TransportationResearchPartF,2009,12(4):300-310.