基于驾驶员实际跟车特性的自适应巡航系统研究
2018-07-02孙芳岑
刘 伟,卫 璐,孙芳岑,林 辉
Liu Wei1,Wei Lu1,Sun Fangcen2,Lin Hui3
(1. 东软睿驰汽车技术(沈阳)有限公司,辽宁 沈阳 110179;2. 大陆汽车电子(长春)股份有限公司,吉林 长春 130000;3. 东软集团股份有限公司,辽宁 沈阳 110179)
0 引 言
车辆网络技术、控制技术的广泛应用和车辆控制自由度的不断提高,为车辆智能化技术应用提供了坚实的基础。多种具备车载应用条件的传感器逐渐普及,为车辆智能化技术应用提供了丰富的信息。在感知与执行条件具备的前提下,开展车辆决策与控制技术研究,使车辆智能化技术在车辆系统中实现,突破传统的结构设计和面临的技术瓶颈,通过智能化技术提高车辆安全、节能、舒适等综合性能,是目前汽车技术领域关键的研究和应用方向。自适应巡航系统(Adaptive Cruise Control,ACC)在定速巡航系统(Cruise Control,CC)的基础上,进一步考虑安全性与舒适性,能够缓解驾驶疲劳,具备广阔的发展空间。如何合理决策安全跟车距离与安全跟车速度是 ACC算法开发的核心。从实际驾驶特性出发,提出一种有效的计算安全跟车距离的算法,基于此开发全速自适应巡航系统,满足跟起、跟停、跟车、巡航等各种自适应巡航工况,满足实际驾驶情况的稳定性和舒适性。
1 ACC系统结构与原理说明
ACC[1]系统结构如图1所示,是一种智能化自动控制系统,是定速巡航控制系统的升级。其中,最大区别在于ACC以雷达、相机为传感器,持续扫描车辆前方道路,探测前方障碍物的距离、速度,同时结合驾驶员意图和自车运动状态,决策安全跟车距离和安全跟车速度。当与前车之间距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,使发动机的输出功率下降,使车辆与前方车辆始终保持安全距离。
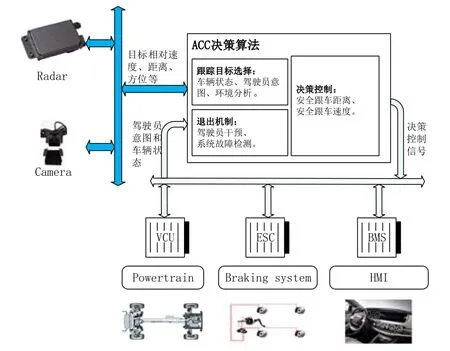
图1 ACC系统结构
2 基于驾驶员跟车特性的自适应巡航算法开发
2.1 ACC系统中安全跟车距离计算
ACC系统通过获得自车运动状态(车速、加速度、转向盘转角)、驾驶员意图(转向盘转角、油门踏板开度、制动踏板开度)等车辆内部状态信息,进行车辆运动估计和驾驶员意图估计,然后指导雷达、相机等传感器进行信号处理和信息融合,提高识别的准确率和算法的运算效率,确定有效的跟随目标[2-3]。确定有效目标后,获得跟随目标的距离、相对速度(相对自车)等信息,如图2所示。
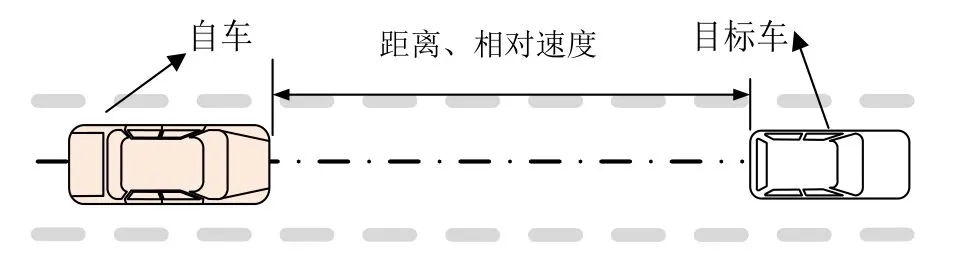
图2 跟随目标信息检测
获取目标车相对自车的距离与相对速度后,实时判断当前的跟车距离是否安全,当判定当前的跟车距离小于安全跟车距离时,执行减速控制,反之,当判定当前的跟车距离大于安全跟车距离并且当前车速未达到设置的巡航车速时,执行加速控制。可见,合理决策安全跟车距离在ACC系统算法中非常关键。
2.2 基于驾驶员实际跟车特性的安全跟车距离
目前,ACC算法中多数是利用跟车时间间隙计算安全跟车距离,即

式中,v为自车的速度;T为跟车时间间隙。
图3为驾驶员跟车过程中记录的一段数据,从图中可以看出,在实际驾驶过程中,跟车距离不仅与自车车速相关,而且与目标车辆的相对速度趋势关系密切,所以,仅依据自车的速度决策跟车距离是不完善的,需要考虑驾驶员的跟车特性[4],提出一种新的充分考虑安全因素的决策安全跟车距离的算法。
根据加速度-位移公式
可得,vx以减速度a从v减至0,驶过的距离s与v满足式(2)。

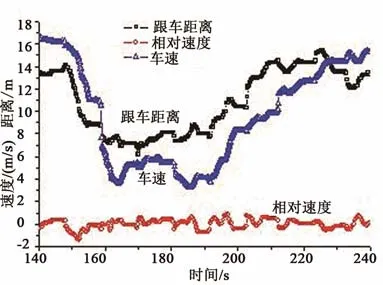
图3 驾驶员跟车数据
假设自车当前的车速为vx,m/s,目标车辆相对于自车的速度为vr,m/s,减速度常数为a,m/s2,自车从当前位置以减速度a进行制动,所需要的制动距离为式中,Sego为自车制动距离,m。

目标车辆从当前位置以减速度a进行制动,所需要的制动距离为

式中,Starget为目标车辆的制动距离,m。
如图4所示,当目标车比自车慢,即vr<0时,若2车以同样的减速度a同时开始制动,自车完全停止所需要的制动距离比目标车完全停止所需要的制动距离长SDelta,即

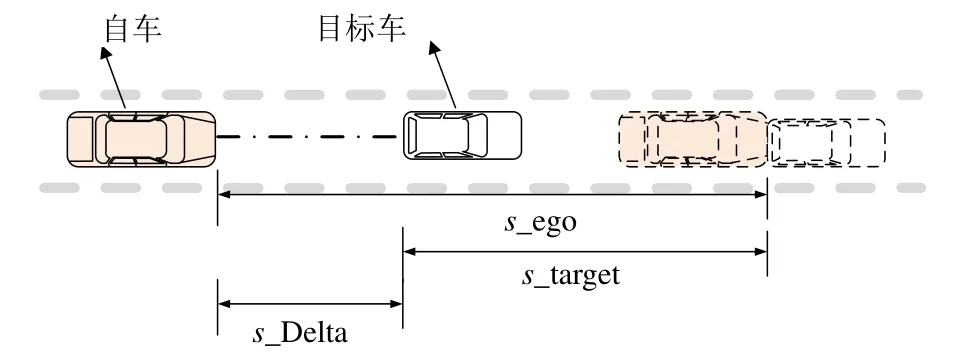
图4 制动示意图
即当目标车辆开始减速时,如果自车驾驶员能够立即采取制动措施,那么需要 2车制动前的距离不小于SDelta才能保证2车刚好不相撞。在实际情况中,从前车开始制动到自车驾驶员开始采取制动措施之间,一定会存在一段时间间隔,定义这段时间为驾驶员的反应时间Tr[5]。同时,图4中为一种刚好不碰撞的临界状态,为提高安全系数,应该保证 2车完全停止后,二者之间仍然存在一段距离,定义为停止距离stopGap。
综上,提出安全跟车距离公式为

式(6)为考虑驾驶员特性的安全跟车距离与当前自车车速、不同驾驶员反应时间、自车与目标车相对车速的关系。特定的驾驶员,其反应时间可以作为其跟车特性指标。根据式(6),特定驾驶员(Tr为常数)所对应的安全跟车距离如图5所示。由图5看出,安全跟车距离与自车车速正相关,与相对车速负相关。

图5 安全跟车距离与自车车速和相对车速的关系
3 基于驾驶特性的ACC系统仿真分析
在实际驾驶过程中,将自车车速、目标相对车速作为式(6)的输入,设定不同驾驶特性,即可获得安全跟车距离与驾驶员实际跟车距离之间的关系,如图 6所示,给出了驾驶员反应时间为0.7 s和1.2 s时的曲线。从图中可以看出,在接近前车、远离前车、随前车启动和随前车停止等工况下,式(6)的计算方法能够比较好地与实际跟车距离贴合,并且通过驾驶特性参数的调整,能够获得不同特性的自适应巡航特征。
将安全跟车距离模型在Simulink环境下进行搭建,并通过快速原型设备进行实车测试。测试过程中实时获取目标车辆的相对距离、相对速度以及自车的速度,根据式(6)实时计算安全跟车距离。Simulink环境下的模型如图9所示。
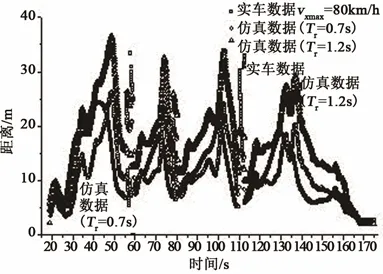
图6 不同反应时间下跟车距离与实际跟车距离对比
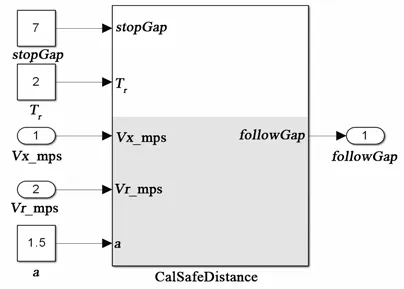
图7 Simulink环境下安全跟车距离模型

图8 ACC开发平台与测试场景
其中,停止距离stopGap为7 m,驾驶员反应时间Tr为2 s,加速度常数a为1.5 m/s2。
4 基于驾驶特性的ACC系统实车测试
4.1 实车测试环境
将安全距离计算方法集成到ACC模型中,并进行实车测试,测试平台和测试环境如图8所示。通过快速原型方式将算法下载到AutoBox中,接入毫米波雷达获取目标距离、方位角、相对速度等障碍物信息,接入整车网络获取自车车速、转向盘转角等车辆状态信息。通过制动减速度、发动机扭矩实现自车车速控制,从而保持安全距离。
4.2 实车测试数据分析
图9为基于图7的安全跟车距离进行自适应巡航的实车测试数据。从图中可以看出,所提出的计算安全跟车距离的模型能够为自适应巡航系统提供有效的控制目标,并与车速控制系统形成合理的闭环,及时响应速度与相对速度的变化,以此为依据进行后续控制能够将自车与目标车之间的距离保持在合理范围内。
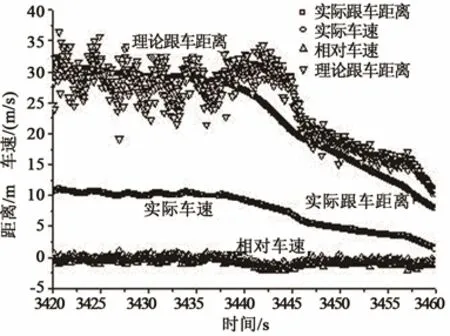
图9 实车测试结果
5 结 论
分析跟车过程中的驾驶行为,结合前车运动、自车运动和驾驶员反应时间计算实际跟车过程中的理论安全距离,通过与实际跟车测试数据对比,发现模型能够较好地拟合跟车过程,可用于自动驾驶或者自适应巡航系统的跟车距离决策,并且通过特征参数调整获取不同驾驶/乘坐习惯,这使自适应巡航系统更加符合驾驶员的跟车行为,带来更好的舒适性。
[1]刘洪玮. 汽车自适应巡航控制系统的研究[D]. 上海:东华大学,2010.
[2]Johan Bengtsson. Adaptive Cruise Control and Driver Modeling[D]. Lund University,2001.
[3]李肖含. 汽车自适应巡航控制系统模糊控制策略研究[D]. 北京:北京理工大学,2015.
[4]袁伟,付锐,马勇,等. 基于高速实车驾驶数据的驾驶人跟车模型研究[J]. 汽车工程,2015,37(6):679-685.
[5]吴超仲,马晓凤,严新平.考虑驾驶员反应能力的跟驰模型[J].武汉理工大学学报(交通科学与工程版),2007,31(4):630-632.