约束轮对首次穿越失效的随机非线性最优控制
2018-06-30刘伟渭姜瑞金刘凤伟李奕璠张良威
刘伟渭,姜瑞金,刘凤伟,李奕璠,张良威
(1.西南交通大学 机械工程学院,四川 成都 610031;2.中国中车长江车辆有限公司,湖北 武汉 430000;3.西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
在轨道车辆结构振动的控制中,常以系统响应最小为控制目的,而对受控结构的可靠性或以可靠度最大化为目标的随机最优控制问题的研究还并不充分[1-3]。对于机械结构而言,所谓可靠性就是系统处于安全域内的概率大小,系统寿命就是结构处于安全域内的时间长度,而系统损坏就是结构首次穿越了原有安全域边界。这也表明,系统穿越安全域的概率大小、存在于安全域时间的长短对于维持结构安全运行具有较为重要的意义,对于结构系统而言,若能通过外部的控制作用来提高系统可靠性,这对于结构的长期安全运行是一种较为有效的措施[4-8]。
对于高速列车而言,车辆的蛇行失稳、脱轨失效是影响列车长期安全服役安全可靠性的主要因素。车辆蛇行失稳、脱轨失效行为不仅是系统的固有属性,而且与车辆运行的外部环境也具有重要关系。在线路实际运行时,车辆经常会受到道岔冲击、强烈的横风作用、车辆结构件失效以及轮轨接触关系恶化等因素影响。这将破坏系统原有较为稳定的可靠性性能,使车辆存在安全隐患。对于处于运营中的车辆出现上述失稳等情况,如果只能通过停车或减速运行来处理,将造成较为严重的运营事故。基于此,本文以轨道车辆可靠性性能提高为对象,通过随机非线性控制策略的选取达到对系统稳定性性能改善的具体目标[9-10]。
1 可靠度最大化的随机非线性最优控制方法
考虑受控作用下的拟不可积Hamilton系统结构,受控平均It微分方程为
( 1 )
其中,
( 2 )
若原系统的正常运行区域为[0,Hc),[0,∞)为Hamilton函数取值范围,H(0)=H0∈[0,Hc)为系统初值,为了提高系统可靠性,可定义最优成本函数
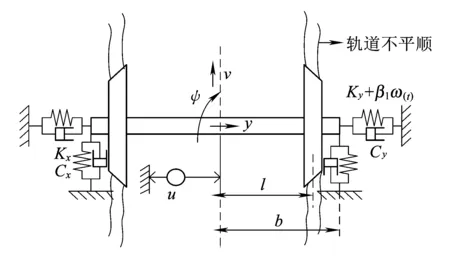
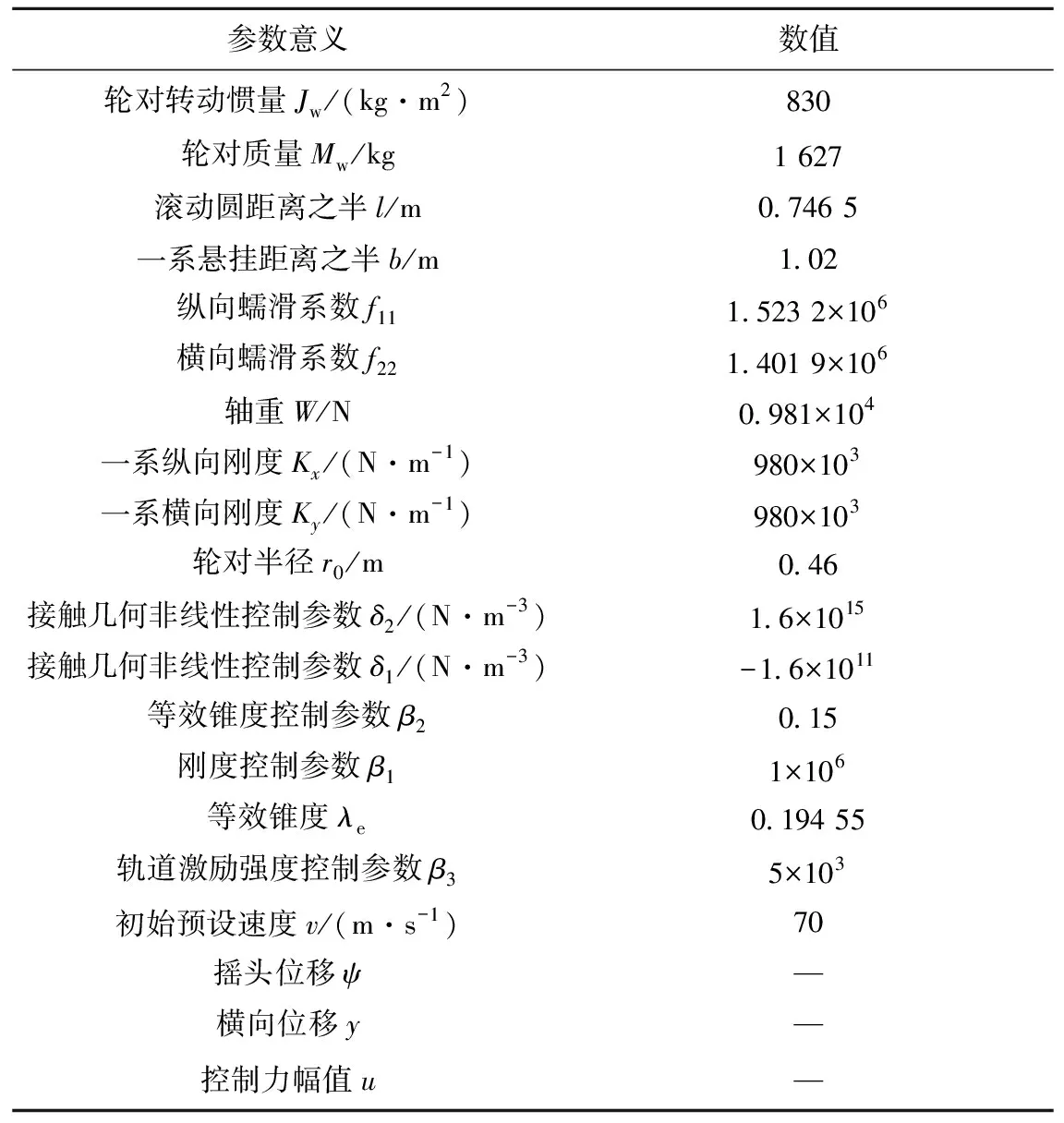
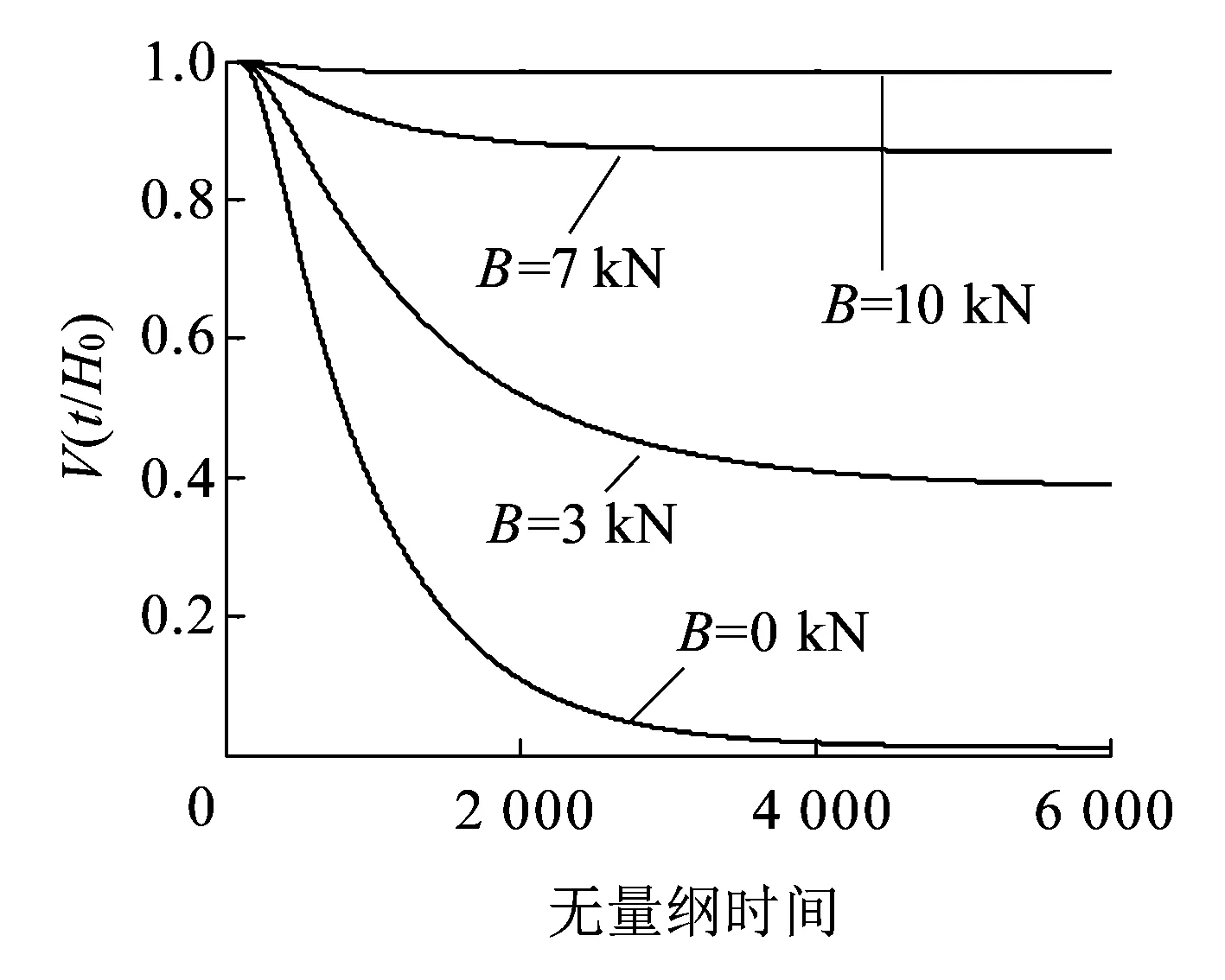
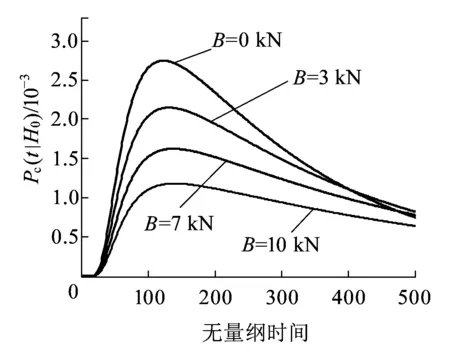
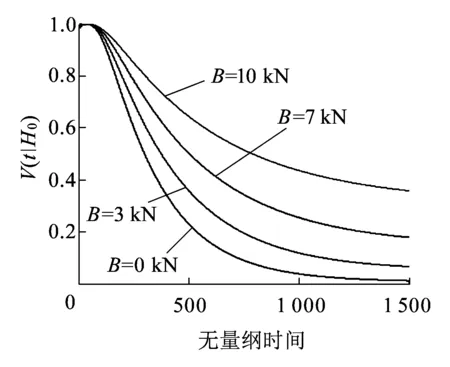
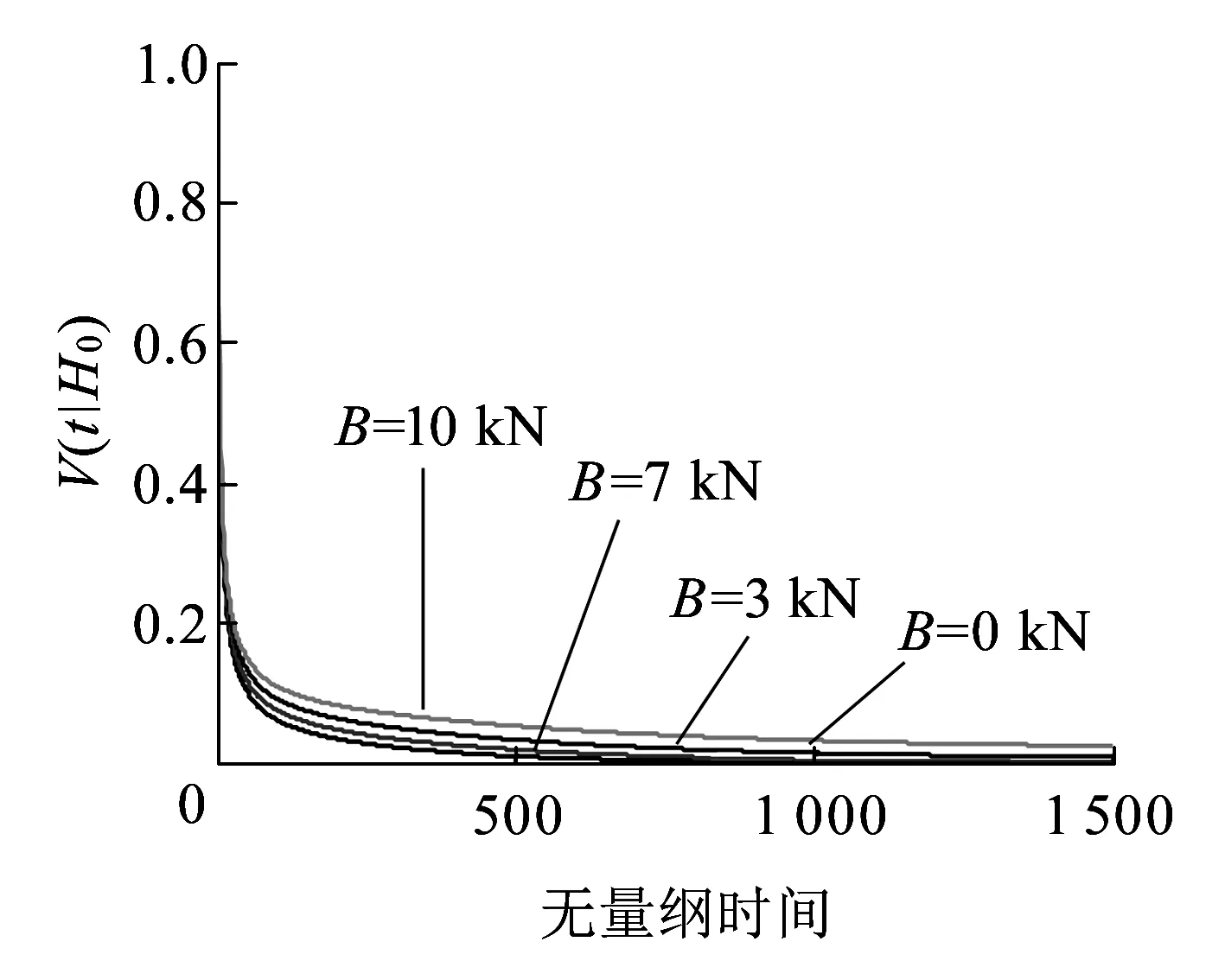
t ( 3 ) 首次穿越时刻为τ;控制终时时刻为tf≤τ;受控约束条件为u∈U。此时作为可靠度最大化为控制目标的动态规划方程为 0≤t≤tfH∈[0,Hc) ( 4 ) 其中的边界条件为 V(Hc,t)=0 ( 5 ) V(0,t)=有限 ( 6 ) 终值条件为 V(H,tf)=1H∈[0,Hc) ( 7 ) 式( 4 )~式( 7 )即为受控条件下原系统可靠度最大化的首次穿越数学方法。 把方程( 4 )的动态规划方程右边对ui进行极大值分析,得到原系统的最优控制率条件。假如约束条件为 |ui|≤bii=1,2,…,n ( 8 ) 其中,bi是定值,可以看出,当|ui|=bi,并且ui的数值能使ui(∂H/∂Pi)(∂V/∂H)得到正值,此时的式( 4 )右边即可得极大值,则控制率为 ( 9 ) 因为可靠性函数在任何初值下均是单调递减函数,即∂V/∂H<0,这样式( 9 )可简化为 (10) (11) 其中, (12) 0≤t≤tfH∈[0,Hc) (13) 式(13)的边界控制条件和终值控制条件为式( 5 )~式( 7 )。此时的条件可靠性函数为 Rc(t1|H0)=P{H(s,u*)∈[0,Hc), s∈(0,t1]|H(0)∈[0,Hc)} (14) 满足后向Kolmogorov方程 (15) Rc(t1|Hc)=0 (16) Rc(t1|0)=有限 (17) 初始条件为 Rc(0|H0)=1H0=∈[0,Hc) (18) 原系统首次穿越损坏条件的概率为 (19) 首次穿越时间τ具有的条件概率密度为 (20) 为分析更为接近轨道车辆的实际运行工况,考虑如图1所示的约束轮对模型,在该模型中考虑了一系悬挂刚度参数激励影响以及来自钢轨的随机不平顺激励作用。本文重点关注系统的横向失稳可靠性以及控制策略的有效性,由于垂向悬挂对横向运动耦合影响较小,为便于直观分析,只考虑横向模型。 图1 受控的弹性约束轮对模型 上述模型中各参数和具体数值见表1。 表1 各参数及数值 受控约束轮对系统运动方程为 (21) 假设有变量代换 a=a1+a2β01=β11+β12 β02=β13+β14β03=β23+β24 原系统的Hamilton函数为 (22) 式(21)可改写为 (23) 其中, m11(q1,p1)=a1m12(q1,p2)=0 f1(q1)=β11q1+β12q1+β13+β14 f2(q1)=β22q1+β23+β24 式(23)为受控约束轮对随机激励耗散Hamilton方程组。 约束轮对系统受控条件下其求解过程服从一维扩散过程,而该过程被平均It微分方程所支配。 (24) D((β13+β14)2+(β23+β24)2) (25) D((β13+β14)2+(β23+β24)2)H (26) 根据式(10)有 (27) 式( 1 )中的ui由式(29)的最优控制率u*取代,进行平均则有 (28) 把式(28)代入式(24),受控条件下的漂移系数为 (29) 把式(29)和式(26)分别代入式(13)和式(15),即可得到可靠度最大化为控制目标的首次穿越时间条件概率密度以及最优动态规划方程。 方程(13)为二阶变系数抛物线与双曲线组合型偏微分方程,对其的求解采用有限差分法Peaceman-Rachford,初始能量H0=0.02,各参数值见表1。 图2为不同控制力幅值下系统可靠性随时间的变化情况,其中横坐标为系统运行的无量纲时间,纵坐标的可靠性函数值表示系统处于安全域内的概率值,当纵坐标为0时表示系统必将穿越安全域而发生失稳脱轨,当纵坐标为1时表示系统始终处于安全域内,当纵坐标为(0,1)时,表示系统处于安全域内,只是具有一定概率值。从图2可以看出,当系统没有受到控制约束作用时,即B=0,此时轮对系统的可靠性函数值随着运行时间的增加,逐渐减小,并最终趋于恒定值零。当受到控制约束作用后,控制力为3 kN和7 kN时,仍然具有上述规律,但是此时可靠性函数的最终恒定值随着控制力的作用逐渐增加。特别地,当控制力增加为10 kN时,可靠性函数值几乎没有减小趋势,而始终恒定于1。总体来看,约束轮对系统在该控制策略下,稳定性的可靠性性能改善明显,在此参数条件下,原系统不稳定,受控后可改变系统的稳定性,使原不稳定性系统变为概率意义上的稳定系统,特别是当控制力达到某一幅值后,系统将转变为绝对意义上的稳定系统。 图2 不同控制力幅值下系统可靠性随时间的变化情况 图3为不同控制力幅值下系统首次穿越时间概率密度随时间变化情况,其中横坐标为系统运行的无量纲时间,纵坐标的首次穿越时间条件概率密度表示系统在对应的运行时刻点上穿越出安全域的概率值,数值越小系统越能维持于安全域内。从图3可以看出,随着运行时间的增加,不管是否受控,系统均呈现出首次穿越时间条件概率密度先逐渐增加,达到某一峰值后再逐渐减小,并最终趋于一恒定值。未受控时(即B=0),在时刻t=110,具有最大概率值;受控后,随着控制力从3、7、10 kN逐渐增加,最大概率幅值逐渐减小,但是出现最大概率幅值所对应时刻几乎也在t=110。总体来看,在该控制策略作用下,系统发生首次穿越的概率会随着控制力的增加逐渐减小,而使系统变得更为稳定,然而控制作用却不能改善或延迟系统发生首次穿越的时刻。 图3 不同控制力幅值下系统首次穿越时间概率密度随时间变化情况 为分析在不同系统初始能量激励下随着控制约束的变化影响,得到了图4、图5的结果。图4初始能量H0=0.04,图5初始能量H0=0.08,二者的控制约束力分别为0、3、7、10 kN。由图4可以看出,随着轮对运行时间t的增加,可靠性函数值的变化规律为先从1逐渐减小,并最终趋于介于0~1之间的一个恒定值。当未控时(B=0 kN),可靠性函数值最终趋于0,表明系统随着运行时间的增加将失效;而当控制力从3 kN变化到10 kN时,可靠性函数的稳定值逐渐增加,表明系统随着运行时间的增加不会失效,并且控制力越大系统失效的可能性越小。由图5可以看出,当初始能量较大时,随着轮对运行时间的增加,系统在较短时间内,可靠性函数值迅速从1减少为一个接近于0的稳定值。当控制力从0、3、7、10 kN逐渐增加时,可靠性函数的恒定值只是略有增加,控制效果几乎不起作用。这表明,当轮对运行具有较大初始激励能量时,系统将快速失稳并脱轨失效,这是由于轮对失稳的振动为发散运动,系统的能量逐渐增加,并最终超过轮轨约束而脱轨,即使此时提供约束控制,效果也不明显。 图4 不同控制力幅值下系统的可靠性随时间变化情况(H0=0.04) 图5 不同控制力幅值下系统的可靠性随时间变化情况(H0=0.08) 为分析约束轮对首次穿越失效后的最优控制,并改善系统的稳定性性能,建立受控动力学模型中考虑轨道不平顺激励和自身结构参激的动力学模型。基于随机动态规划原理的控制策略,并运用拟不可积Hamilton系统随机平均法,以可靠度最大化为控制目标,建立可靠性函数和首次穿越时间概率密度函数的动态规划方程。 分析表明,通过控制力作用,可使原本不稳定的系统在受控后变为概率意义上的稳定系统,在选取适当控制力条件下,甚至可使可靠性函数值接近于1,而使系统成为绝对意义上的稳定系统。另外,在系统失稳初期,并未激发较大能量时,即使提供较小的外界控制约束力作用,也能达到较好效果;如果系统失稳,经过一段时间而激发了较大振动能量,此时再提供约束作用,对改善系统性能已不明显。 上述内容仅针对单轮对随机最优控制的理论分析,为了分析的完整性,还应增加试验验证对比。在后续研究中,将继续完成轨道车辆整车随机最优控制理论和仿真分析,把具有二系横向作用器装置的整车在滚振台上进行试验,并与理论分析进行比较和验证。 参考文献: [1]曾京,戴焕云,邬平波.基于开关阻尼控制的铁道客车系统的动力学性能研究[J].中国铁道科学,2004,(25)6:28-32. ZENG Jing,DAI Huanyun,WU Pingbo.Dynamics Perform-ance Study of Railway Passenger Car System Based on On/Off Damping Control[J].China Railway Science,2004,(25)6:28-32. [2]欧阳冬,张继业,张卫华.铁道车辆自供能量横向主动悬挂系统[J].交通运输工程学报,2008,8(1):15-18. OUYANG Dong,ZHANG Jiye,ZHANG Weihua.Self-powered Active Lateral Suspension System of Railway Vehicle[J].Journal of Traffic and Transportation Engineering,2008,8(1):15-18. [3]佐佐木君章.改善高速列车的横向乘坐舒适度——半主动悬挂减振装置的应用[J].铁道学报,2004,26(1):105-115. KIMIAKISASAKI.Improving Lateral Ride Comfort of High-spped Trains Applying Semi-active Suspension Sytem to High Speed Trains[J].Journal of The China Railway Society,2004,26(1):105-115. [4]许佳,王洪礼,葛根.柔性梁在轴向随机激励作用下的可靠性与最优控制[J].天津大学学报,2009,42(8):739-743. XU Jia,WANG Hongli,GE Gen.Reliability and Optimal Control on Flexible Suffered Axial Randomly Excitation[J].Journal of Tianjin University,2009,42(8):739-743. [5]CHEN L C,ZHU W Q.First Passage Failure of Quasi-partial Integrable Generalized Hamiltonian Systems[J].International Journal of Non-Linear Mechanics,2010,45(1):56-62. [6]张巍,应祖光,胡荣春.不确定性拉索非线性随机振动的最优控制[J].噪声与振动控制,2014,34(1):44-46. ZHANG Wei,YING Zuguang,HU Rongchun.Optimal Control of Nonlinear Random Vibration of an Inclined Taut Cable with Uncertainties[J].Noise and Vibration Control,2014,34(1):44-46. [7]葛根,王洪礼,许佳.随机最优控制下矩形薄板受面内随机参数激励的首次穿越研究[J].振动与冲击,2012,31(4):179-183. GE Gen,WANG Hongli,XU Jia.Stochastic Stability and First Passage Failure of Thin Rectangular Plate Subjected to Stochastic Parametrical Excitation[J].Journal of Vibration and Shock,2012,31(4):179-183. [8]孙燕军,冷小磊.公路桥梁车辆耦合系统随机最优控制研究[J].应用力学学报,2012,29(3):335-340,359. SUN Yanjun,LENG Xiaolei.Research on Stochastic Optimal Con-trol of Highway Bridge Vehicle Coupling System[J].Chinese Journal of Applied Mechanics,2012,29(3):335-340,359. [9]凌亮,肖新标,吴磊,等.地震波频谱特性对高速列车动态脱轨行为的影响[J].工程力学,2013,30(1):384-393,431. LING Liang,XIAO Xinbiao,WU Lei,et al.Effect of Spectrum Characteristics of Seismic Wave on Derailment of High-speed Train[J].Engineering Mechanics,2013,30(1):384-393,431. [10]关庆华,曾京.轮轨横向碰撞引起的脱轨研究[J].振动与冲击,2009,28(12):38-42. GUAN Qinghua,ZENG Jing.Study on Derailment Induced by Lateral Impact between Wheel and Rail[J].Journal of Vibration and Shock,2009,28(12):38-42.
2 受控约束轮对系统模型


3 数值仿真结果
4 结束语
