采煤机滚筒自动调高过程中人工干预的实现
2018-06-29薛红梅
薛红梅
(西安科技大学高新学院,陕西 西安 710109)
采煤机滚筒自动调高的关键技术是煤岩界面识别技术和滚筒自动调高技术。现有的煤岩界面识别技术由于井下环境的复杂都不能很好的满足煤矿企业的要求[1]。记忆截割作为一种间接方法已成熟应用于一些大功率采煤机[2]。记忆截割具体过程是:1)人工调高第一刀截割,并对截割轨迹进行记忆;2)在进行第二刀截割的时候,采煤机则可以自动跟随上一刀的记忆轨迹曲线开始自动调高;3)当顶板发生起伏变化时,就需要按当前顶板的实际情况进行人工调节;4)这时候要将上一刀的记忆轨迹曲线进行调节,而下一刀的截割则会按照调节后的记忆曲线作为记忆依据开始自动调整,就这样,在后刀截割过程中,当需要依据顶板的实际变化对前一刀记忆的截割轨迹进行修正时,通过人工干预来保证截割曲线符合顶板的变化,从而确保记忆截割的有效性。人工干预调整算法的功能如图1所示。
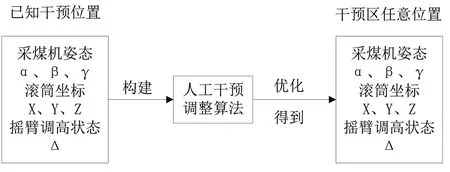
图1 人工干预调整算法的功能
目前也有人对采煤机记忆截割人工干预调整算法进行了研究。传统的数据拟合插值算法(如最小二乘法拟合、三次样条拟合等)是探究数据之间的数学关系式进行处理,是对矩阵元素的独立处理,即对于采煤机某个位置的调高信息是独立处理的,这种方式并不能完全挖掘出数据内部之间的真实关联度,同时还会在与原始数据在连接时出现漏洞,如图4所示。也有人提出用BP神经网络解决,但是只在采煤工作面的一部分采用人工干预方法,所记录的信息较少,因此设置样本数量较少,小样本的情况下采用BP神经网络的逐步逼近结果并不乐观,如图4所示。王忠兵、张丽丽等用传感器信息融合加上遗传算法动态来开展煤岩界面分析,形成修正记忆轨迹[3],同时还使用微粒群的算法对采煤机的截割痕迹进行完善。这种方法可以就每次的截割循环均开展优化,同时采煤机在工作面的所有调高数据都参与,其中涉及到求解Riccati方程等一系列的运算且针对算法的求解速度尚且较慢。因此,采煤机在截割轨迹变化剧烈的区间里,其跟踪一般会有些拖后[3-4]。
针对上述问题,本文在记忆跟踪轨迹的基础上仅对干预区域进行轨迹修正。利用RBF神经网络的局部映射能力,对采煤机记忆截割人工干预数据进行处理从而实现了人工干预。首先司机监测现场,当顶板发生变化的地方进行人工辅助调高,然后利用RBF神经网络对干预数据进行处理,最后对采煤机滚筒跟踪轨迹重新记忆。
一、RBF神经网络
拟合平面的基函数由RBF神经网络的每个隐层神经元传递函数构成,这将是一个局部的逼近网络[5]。RBF神经网络最鲜明的特点就是隐节点的基函数采用的是距离函数且运用高斯函数做为激活函数。RBF网络关于n维空间的一个中心点具有径向的对称性,同时神经元的输入距离中心点越远,其的激活程度也就变得越低,隐节点的这个特性一般被称作“局部特性”[6]。因为每个神经元均具局部特性,因此最终的RBF神经网络也依次表现出“局部映射”的功能。但是,当输入样本变得庞大时,网络实现较为复杂,求解网络的权值时则会容易产生病态问题[7]。如2图所示,输入层节点只是传递输入信号抵达隐含层,高斯函数则是隐层节点的激活函数,隐层各节点输出的线性组合则是由网络的输出所致。
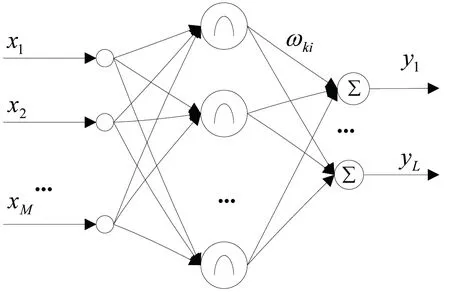
图2 RBF网络拓扑的结构图示
RBF神经网络的目标函数:
(1)
样本模式对为N;网络输出节点数为L;t在样本p的作用之下第k个期望输出我们用kp来表示;在样本p的作用下第k个实际输出我们也ykp来表示。
隐层层的输出如下:
(2)
(3)
输出层输出:
(4)

根据提供的学习样本决定隐层高斯函数的中心向量Ci和隐层到输出层的连接权值wki。

表1 采煤机滚筒的具体位置信息

续表1
二、人工干预数据处理算法仿真
(一)坐标系的建立
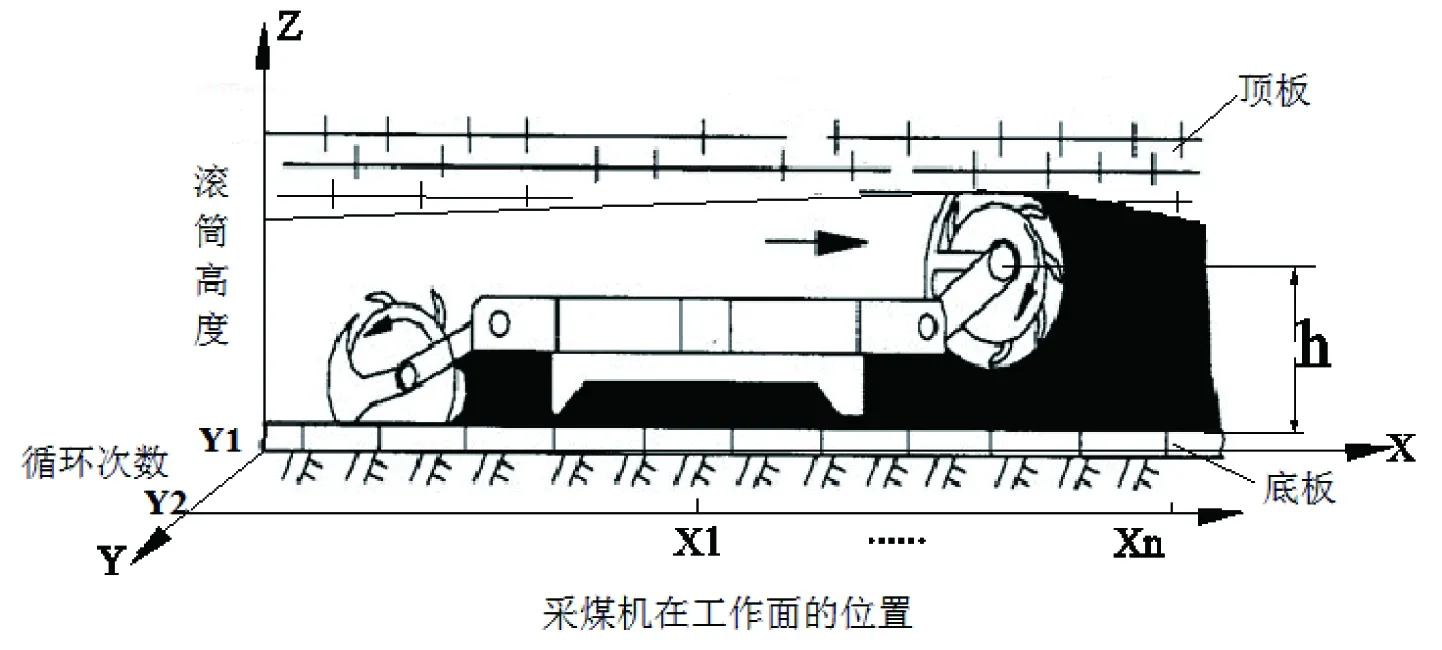
图3 采煤机在综采工作面示意图
如同3图,将采煤机在工作面的原始地点作为坐标原点,沿着采煤工作面方向作为X轴,将工作面的运行推动方向作为Y轴,同时将滚筒高度的方向作为Z轴,如此来建立一个坐标系。
比如一辆采煤机在截割运行过程中其姿态参数α、β不动,然后只是就滚筒的高度参数做以调整。在表1当中,Xi则代表着采煤机在工作面的地方;Yi则代表着第i刀的截割循环;Z则代表着采煤机的滚筒在相应位置上的具体高度。
(二)matlab仿真

图4 记忆截割人工干预数据拟合
如图4所示,采煤机的滚筒一般会在人工干预前依照原始的记忆轨迹展开跟踪,并通过人工干预以及对干预数据信息的处理,随后采煤机的滚筒跟踪轨迹曲线就会在干预区域得到修正,通过修正后的跟踪轨迹如图5所示。
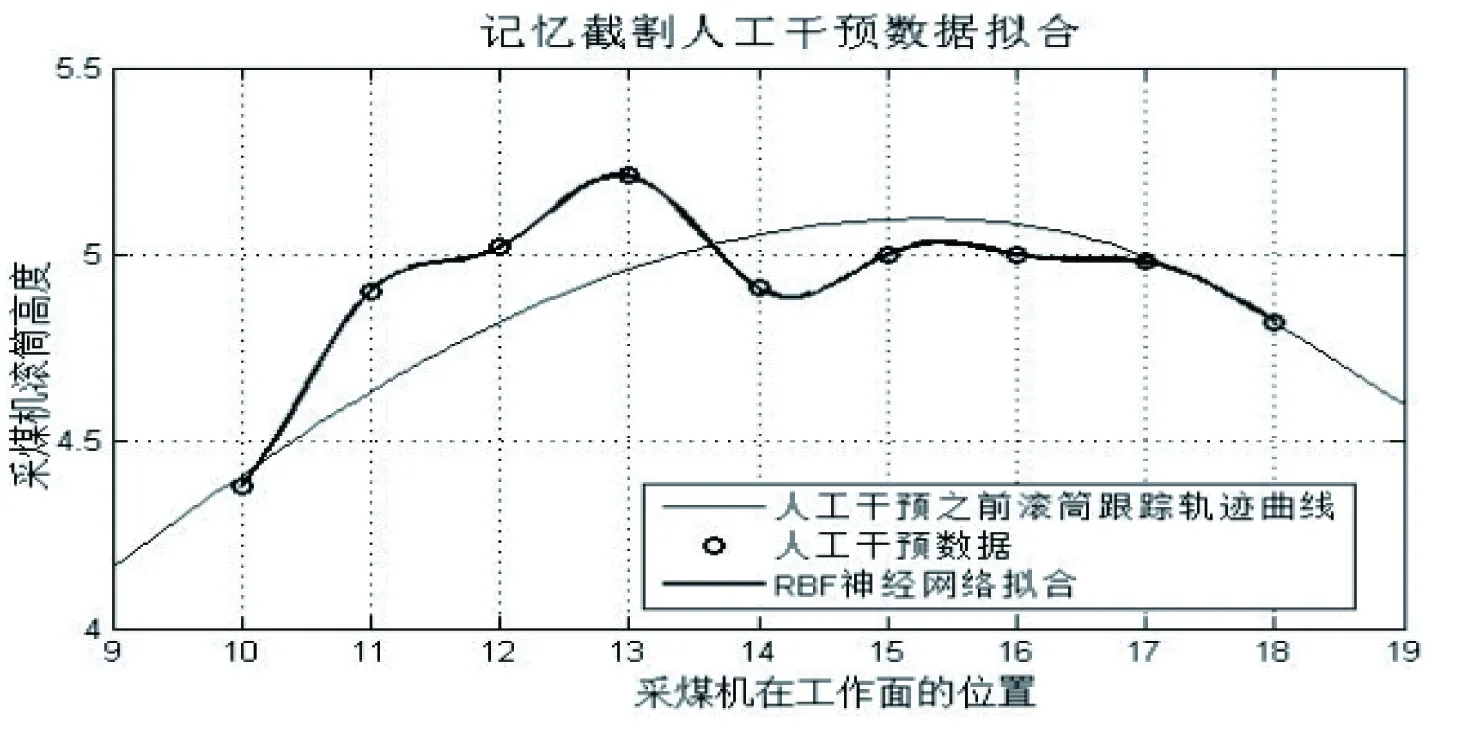
图5 人工干预后采煤机滚筒的跟踪轨迹
注:曲线1——图为司机进行手动调高的截割过程曲线;曲线2——图为第一刀截割曲线的跟踪记忆截割曲线;曲线3——图为进行人工干预的全部过程;曲线4——图为得到人工干预修正以后的记忆截割曲线;曲线5——图为对第四刀记忆曲线进行的跟踪曲线。
图6所示的仿真结果验证了以上人工干预算法的有效性。
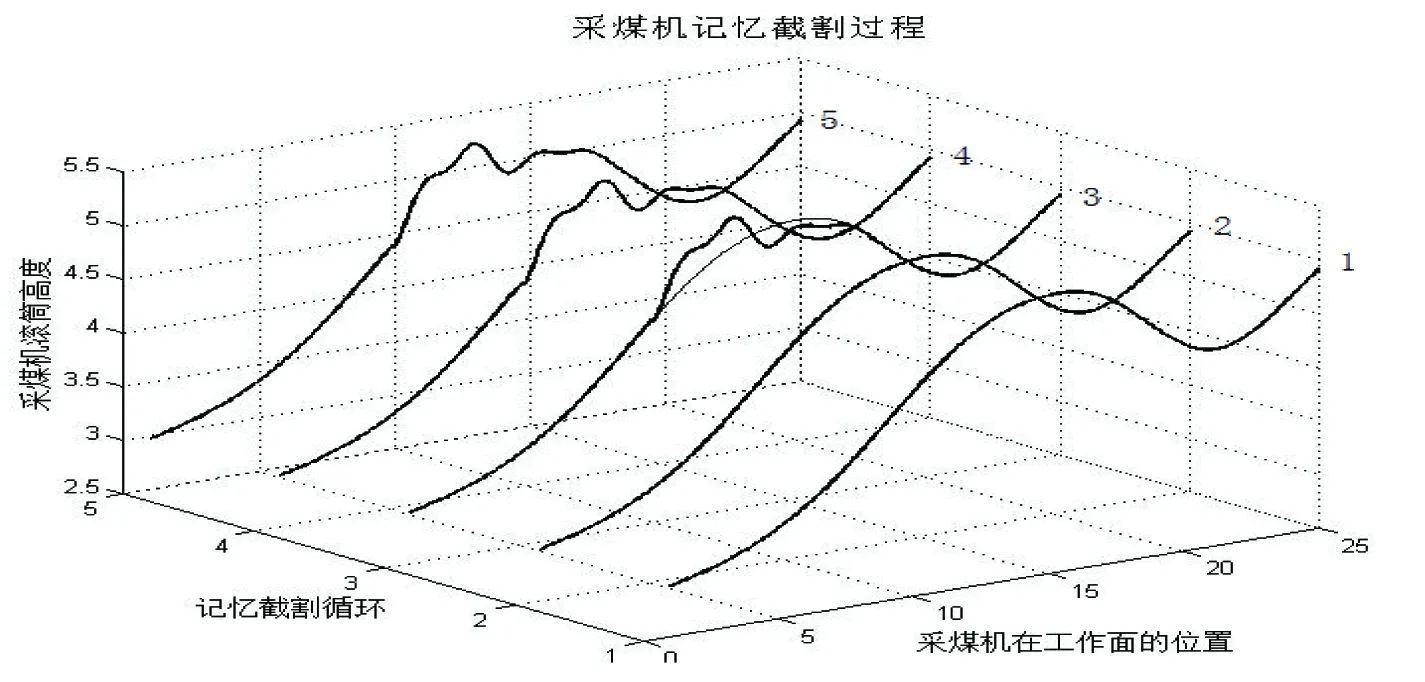
图6 采煤机记忆截割过程
三、干预的软件实现
图7为人工干预下形成的软件系统编程流程图示,这里我们需要先对干预断点进行监测,即我们要清楚在什么地方和什么情形之下是需要展开人工干预的,这时候就需停止自动跟踪的流程,与此同时还要启动手动控制,在手动控制的进程下使用键盘控制油缸继电器的开关,方可对摇臂进行控制。在操作过程中还需要对人工控制过程中采煤机的一些运行、截割参数进行记忆,使用RBF的算法对所记忆下来的参数展开相应处理,且覆盖掉原始对应位置采煤机的运行截割数据,随之即可进行下一轮判断。

图7 人工干预软件实现流程图
四、实验验证
本实验是在试验样机上进行的,该试验样机是参照MG500/1130-WD型电牵引采煤机按1:6制作的。实验过程保持试验样机的牵引速度和机身姿态不变的条件下,进行人工干预修正记忆截割曲线。

图8 采煤机记忆截割人工干预控制界面
如图8所示,首先是对前一刀记忆跟踪曲线的读取并跟踪,然后根据现场监控,在截割轨迹改变的地方进行人工干预并对干预数据进行处理,最后进行数据替换。干预前后采煤机滚筒的跟踪曲线如图9所示。
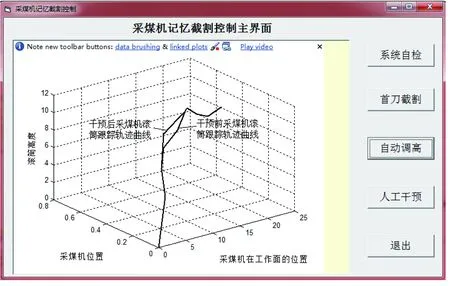
图9 采煤机进行记忆截割时人工干预前后的滚筒运动轨迹
五、余论
文章以采煤机的滚筒自动调高过程中人工干预作为研究对象,最终达到了手动辅助调高的结果。对原有记忆的修正截割以及对其干预数据的处理,使得其最终重新开始记忆滚筒跟踪轨迹。这种收敛速度相对较快且简单的算法特色,极大地促进了工作面采煤机自动调高系统的不断发展和逐步完善。
[1]李春华,刘春生.采煤机滚筒自动调高技术分析[J].工矿自动化,2005(4):48-51.
[2]刘春生.滚筒式采煤机记忆截割的数学原理[J].黑龙江科技学院学报,2010,20(2):85-90.
[3]张丽丽,谭超,王忠宾,杨雪锋,米金鹏.基于遗传算法的采煤机记忆截割路径优化[J].煤炭工程,2011(2):111-113.
[4]张丽丽,谭超,王忠宾.基于微粒群算法的采煤机记忆截割路径优化[J].煤炭科学技术,2010,38(4):69-71.
[5]许东,吴铮.基于MATLAB6.X的系统分析与设计———神经网络(第二版)[M].西安:西安电子科技大学出版社,2002:24-26.
[6]李国勇.智能预测控制及MATLAB实现[M].北京:电子工业出版社,2010:24-27.
[7]高隽.人工神经网络原理及仿真实例[M].机械工业出版社,2003:58-59.