新形枣果收集装置的设计及控制系统仿真分析
2018-06-28郭琳孙铭辛琳高帅刘蒙王兴源
郭琳,孙铭,辛琳,高帅,刘蒙,王兴源
(东北林业大学,黑龙江 哈尔滨 150000)
梳耙式枣果收集机主要由动力装置、收集装置、机械手臂等组成,动力系统为装置提供动力,通过控制气压缸的运动,实现对机械手臂的运动控制,柔性的梳耙将枣果与树枝分离,分离的枣果由伞状收集器统一收集。与传统的人工收集相比,机器收集的效率更高,与震动式收集器相比,梳耙式枣果收集器避免了对树枝的损伤,故对气动梳耙式枣果收集器的研究很有价值。
1 整机结构及工作原理
1.1 整机结构
针对于枣果生长的条件,设计了一种梳耙式枣果收集机,主要由气压系统、可移动基体、机械手臂、集果装置、伞状收集器等组成。整机的气压系统为装置提供动力。基座上带有车轮,车轮部分采用履带式,它的优点是越障碍能力突出。集果装置位于装有储气缸的可移动基座上方,其作用为收集从伞状收集器收集的枣果。机械手臂和伞状收集器安装在集果装置上方,负责梳耙枣果。两台可同时工作的机器中间有一个导向环,工作时它套住树干,两机器间的连杆可绕着导向环旋转。收获机具体结构如图1所示。
1.2 工作原理
根据枣果的分布情况,控制机械手臂的运动,完成最优收集。本机器采用的是气动系统,利用PLC编程来控制气流阀,空气推动气缸的活塞完成气缸的收缩,从而实现机械手臂的空间运动。当收集完一个位置的枣果时,控制车轮运动,装置将旋转至另一个收集位置进行收集。经梳耙爪梳离坠落的枣果会落到伞状收集装置处,伞状收集器收口于收集盒,故枣果会沿着帆布滑落至收集盒内,从而完成枣果的收集。
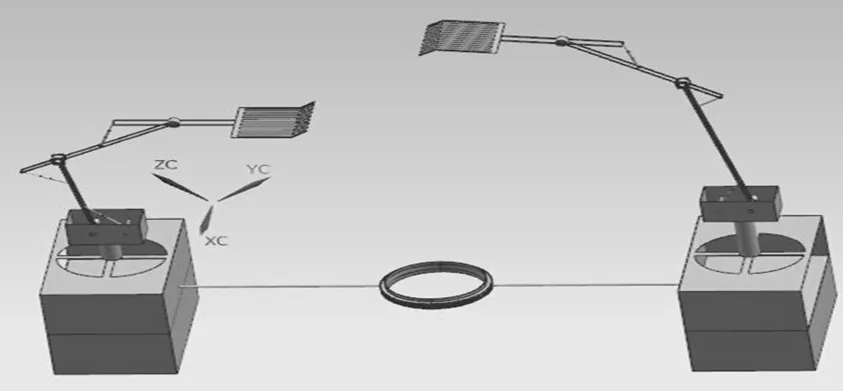
图1 梳耙式枣果收获机机构图
2 机械手臂的设计分析
2.1 机械手臂的运动学分析
机械手臂的具体工作性能与它的运动和姿态有很大的关系,当对机构的几何参数初步确定后,就可以对机械手臂的动臂、斗杆、梳耙杆进行必要的运动学分析,简化计算图如下图2所示。
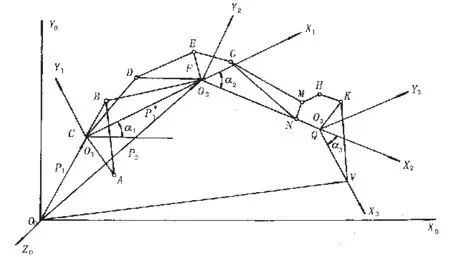
图2 简化计算图
2.1.1 运动学坐标的建立
2.1.2 数学模型的建立
梳耙式机械手臂采摘时,可根据气缸的长度来得出坐标系之间的姿态角即夹角,再由姿态角得出气缸的真实长度。
(1)梳耙式机械手臂各点坐标计算。当我们已知工作装置各点换矩阵可以求得各点在坐标系中的位置,具体的计算方法如下。
坐标系中的点在动态坐标系中的位置可以计算得出为[X,Y,1]=。
坐标系中的点在动态坐标系中的位置可以计算得出为[X,Y,1]=,以此方法同理计算出各点坐标。
(2)机械手臂的运动。通常在考虑机械手臂的运动时,可以利用正运动学和逆运动学。
设动臂的坐标原点相对于的位置向量为和,相对于坐标系原点的位置矢量为。
我们设定速度和角速度分别是角速度,和分别为相对于坐标系。机械手臂的动臂坐标系相对于机座坐标系的线速度和角速度可以分别通过如下计算得到:
坐标系相对于的角速度,枣果采摘手臂中的动臂在坐标系是转动的,它以为轴相对于斗杆以转动,因此我们可知:
通过上面公式进行化简我们可以轻易地得到动臂相对于机械臂中斗杆的线速度和线加速度分别为:
那么动臂相对于的线速度和加速度我们也可得到为:

进行运动学分析,有利于机构的设计优化,而且对实现自动控制也具有非常重要的意义。
2.2 枣果采摘机械手臂位置控制系统的仿真分析
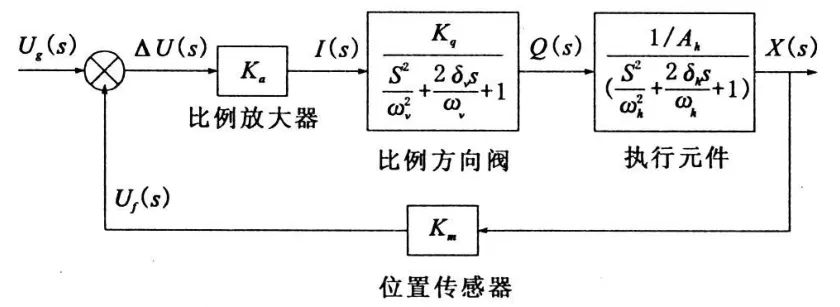
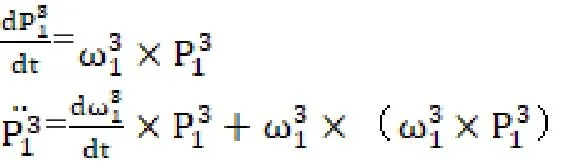
图3 闭环位置控制系统传递函数方框图
仿真分析是十分必要的。本论文先对枣果采摘机械手臂位置控制系统进行仿真分析,在这里以机械采摘手臂的斗杆装置作为例子,它的开环传递函数可以轻易地得到,图3为闭环位置控制系统传递函数方框图。
此系统为I型系统,影响动态性能的主要是气压缸和比例阀的频率,开环增益和气压缸的阻尼比主要影响系统的快速性和稳定性。现在我们运用MATLAB软件对系统进行仿真,观察闭环系统的单位阶跃响应曲线能否满足要求。
由仿真的结果我们可以看到,未调节的系统的峰值时间、调整时间不能够满足系统的要求,所以我们必须加入控制器进行调整。经过综合分析最终我们确定采取PID控制器,取各项系数为Pk=16,Ti=1,Td=0.1。未经调整的系统无超调,且不能达到控制系统快速性的要求。经过引入PID控制器校正后可以得知峰值时间为4.8s,调整时间为3.6s。从单位阶跃响应曲线上(如图4)。两条曲线对比可知,在引入了PID控制器后,控制系统的响应特性得到了很大的改善,已经符合我们对控制系统的要求。
图4 闭环系统的单位阶跃响应
3 结语
通过建立梳耙机械手臂的数学模型来确定装置工作时的位置和姿态,机械式梳耙装置的数学模型可以用于机构的设计以及运动学的分析。通过对位置控制系统的仿真分析,我们引入PID控制器,从而使得控制系统的性能得到改善。
[1] 付威.4ZZ-Z型自走式红枣收获机[J].湖南农机,2012,(35):1-2.
[2] 范进桢.挖掘机的运动学分析[J].煤矿机械,2004,(12):1-2.
[3] 黄宗益.挖掘机工作装置轨迹控制[J].建筑机械,1988,(2):28-29.
