基于单片机控制的红外线与超声波混合避障智能小车
2018-06-28唐渊周汝段武斌刘臻
唐渊,周汝,段武斌,刘臻
(湖南工业大学电气与信息工程学院, 湖南 株洲 412000)
1 混合避障智能小车的原理
本文设计的混合避障智能小车主要由单片机控制模块、红外线与超声波混合避障模块、电机驱动模块等组成。系统的总体框图如图1所示。
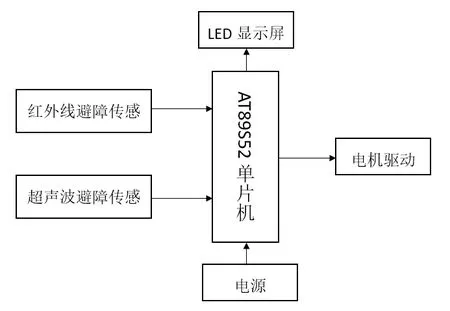
图1
基于单片机AT89S52设计的智能避障小车,需提供+12V和+5V电源,DC+5CV由直流+12V经7805转换得到,为单片机及其他电路提供工作电压,DC+12V由市电直接转化,主要为电机提供驱动电压。超声波避障模块、红外避障模块采用购买的现成的产品。本模块设计拟以超声波、红外线避障系统为核心,配合超声波和红外线避障的优缺点,利用超声波探测工作环境中的固定障碍物同时使用红外线来探测小车周围的运动物体,装上超声波、红外线传感器完成小车对四周环境实时测距。电机及电机驱动模块采用L298N电机驱动模块来控制直流减速电机即可。智能小车采用前轮驱动,前轮左右两边各用一个电机驱动,分别控制两个轮子的转动从而达到转向的目的,后轮是万向轮,起支撑的作用。传感器分布图如图2所示。
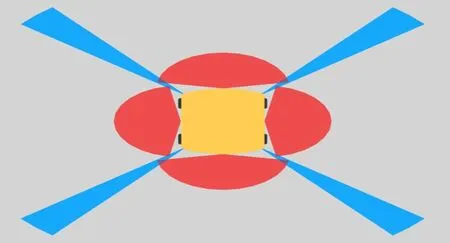
图2
AT89S52单片机主控芯片根据避障传感器接受的信号做出判断,分析小车的动作要求,发送相应的动作命令给电机驱动模块,控制小车实现转向,同时发送至显示屏,并执行命令完成相应动作,达到避障的目的。当车的左边的红外传感器检测到运动障碍物时,主控芯片控制右轮电机停止左轮转动,车向右方转向,当车的右边传感器检测到运动障碍物时,主控芯片控制左轮电机停止转动,车向左方转向,当前面后面有运动障碍物时规定车右转。同时,四个角的超声波传感器检测到固定障碍物时,单片机根据反馈的信息判断距离,主控芯片控制车轮及时做出相应调整,重新规划小车运动轨迹,以达到避障的目的。模拟图如图3所示。
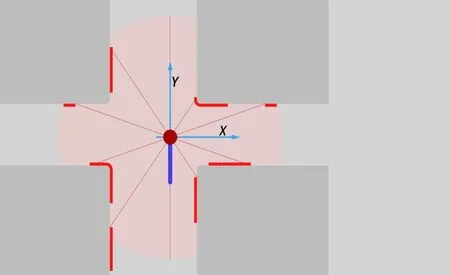
图3
2 系统硬件组成
2.1 单片机主控制电路
选用AT89S52单片机作为主控芯片,本模块主要用于信号的采集并对数据进行分析处理,同时输出高低电平来控制电机速度,从而控制小车前进转弯等动作。
2.2 红外避障模块
本文采用E18-D80NK-N红外线传感器。前方无障碍输出高电平,有障碍输出口电平会从高电平变成低电平,传感器检测到这一信号就可以确认正前方有障碍物,并传送给单片机,单片机通过输入内部的算法,协调小车两轮工作,从而完成躲避障碍物的动作。
2.3 超声波避障模块
本文采用现成的US-100超声波避障模块。通过超声波发射装置发出超声波,根据接收器接到超声波时的时间差就可以测算距离。超声波发射端在单片机前置电路的驱动下工作,接收端的信号放大、整形后在单片机的中断口产生中断,通过发射和接收的时间差计算出小车与障碍物的相对距离。
2.4 电机驱动模块
驱动采用L298N驱动芯片,此芯片可直接由单片机的IO端口来提供模拟时序信,第1脚和第15脚可与电流侦测用电阻连接来控制负载的电路。OUTPUT1、OUTPUT2和OUTPUT3、OUTPUT4 之间分别接2个直流电机;INPUT1~INPUT4输入控制电位来控制电机的正反转;Enable则控制电机停转,特别是其输入端可以与单片机直接连接,从而很方便的受单片机控制。
电机驱动模块主要功能是将主控芯片发出的信号通过电机控制芯片转化为小车实际的动作。当驱动直流电机时,可以直接控制步进电机并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。模块的四个输出分别接在两个独立的电机上。
3 系统软件设计
本文的主要程序设计部分围绕红外线超声波混合避障模块展开,主要编写单片机内部执行程序,首先分析红外线超声波避障的基本流程。单片机将采集的信号进行分析与计算,并将分析后的数据传入控制模块,实现当小车现行速度小于阀值时进行加速,当小车现行速度大于等于阀值时进行减速,保证小车在工作中保持一定距离。针对小车在目标转弯时同步转弯的动作,路径的每个转角处设置一个传感器,当目标经过传感器时,传感器对小车发射信号使小车向目标转弯处转向。
4 结语
本文的障碍物检测单元的核心部件选择了红外线传感器,超声波传感器。红外探头传感器具有精度高、成本低、体积小、接口简单等优点;超声波传感器具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点;AT89S52单片机与电机驱动芯片的结合,既降低了系统成本也提高了系统的可靠性和稳定性,实现了智能小车的避障功能。最终编写相应的程序,进行测试,确保了系统的准确性,稳定性。
[1] 姚佳.智能小车的避障及路径规划[D].东南大学硕士论文,2005.
[2] 李克强.汽车技术的发展动向及我国的对策[J].汽车工程,2009(11):1005-1016.
[3] 林武文, 徐锦, 徐世录. 红外探测技术的发展[J]. 激光与红外,2006, 36(9):840-843.
[4] 强彦, 叶文鹏, 屈明月,等. 基于红外避障的智能小车的设计[J].微电子学与计算机, 2013, 30(2):140-143.
[5] 李瀚霖等. 智能小车研究与设计[J]. 科技致富向导,2011,26.
[6] 袁秀英,李珍.单片机原理与实验教程.北京:航空航天大学出版社,2006.
[7] 李广弟.单片机基础.北京:北京航空航天大学出版社,2001.
[8] 刘教瑜,曾勇.单片机原理与应用[M].武汉:武汉理工大学出版社,2008:90~110.
[9] 赵江. 红外探测技术的现状与发展趋势[J]. 舰船电子工程,2007, 27(1):846-850.
[10] 张金美,王庆福 .基于单片机的红外系统控制研究[J]. 无线互联科技,2011(21):47-48.
[11] 李剑心,基于单片机的红外发射器[J]. 科技信息:学术版2006 12S.
[12] 李建法.超声波测距的电路设计与单片机编程[J]. 安阳师范学院学报,2003:47-48 .
[13] 沙爱军.基于单片机的超声波测距系统的研究与设计[J]. 电子科技, 2009(11).
[14] 陈隆昌,阎志安,刘新正.控制电机[M].西安:西安电子科技大学出版社,2004:234~235.
[15] 胡寿松. 自动控制原理(第五版)[M]. 北京:科学出版社,2007.
