自动激光焊接机器人系统在FPC焊接上的应用思考
2018-06-28钟凌
钟凌
(广州中国科学院工业技术研究院,广东 广州 511458)
随着现代电子设备的进一步发展,自动化、智能化已经成为电子设备未来发展的主要方向。同时,现阶段的电子设备呈现出小型化、集成化的特征,使得越来越多的柔性线路板(FPC)被应用到移动设备终端上。在这种情况下,传统的焊接方法难以满足FPC焊接的技术要求,所以必须要对焊接工艺手段进行改进。本文将以此为背景,研究了自动激光焊接机器人系统在FPC焊接中应用的相关问题。
1 自动激光焊接机器人系统研究
1.1 激光焊接机器人系统分析
产业机器人实用化最早出现于上世纪70年代,在此基础上,焊接用机器人出现、发展,成为当时焊接技术的代表。在传统焊接机器人加工焊接件时,必须要保留一定的空间让烙铁头能够进入到被焊接的部位完成焊接操作,再加之目前部件的引脚间距逐渐减少,相关人员开始对焊接机器人技术进行创新,激光焊接机器人技术应运而生。激光焊接机器人系统是一种非接触式、拥有细小直径的焊接方式,半导体激光发生器技术的创新,让高性能的激光焊接机器人系统成为了可能。在随后的十几年时间中,激光焊接机器人实现了全世界范围内的广泛推广,有效解决部件焊接中存在的细微焊接问题。
自动激光焊接机器人就是在激光焊接机器人基础上发展出现的一种焊接机器人技术,该技术以自动化为核心,能自动化完成多种复杂电子设备的内部焊接工作,例如摄像头、LCD部件、手机、笔记本电脑等。
1.2 自动激光焊接机器人的空间轨迹特征
自动激光焊接机器人作为自动化技术的一种表现形式,能够独立完成焊接操作,所以焊接机器人的空间轨迹变化成为影响焊接机器人焊接效果的重要因素。在焊接过程中,自动激光焊接机器人会在规定的时间内,按照一定的速度与加速度完成移动,从初始状态下逐渐移动到目标位置,这个过程所产生的轨迹就是焊接机器人的空间轨迹。在自动化技术的支持下,为了保证自动激光焊接机器人的空间轨道特征能够符合FPC焊接的要求,相关人员需要完成以下几方面操作:(1)任务描述,确定焊接机器人的焊接运动轨迹。(2)用计算机语言来描述所确定的运动轨迹。(3)计算焊接机器人的加速度情况等,获得焊接机器人运行的具体轨道特征。
2 FPC焊接中应用自动激光焊接机器人系统的路径
2.1 FPC焊接的激光加热
激光加热是自动激光焊接机器人焊接的基础,在焊接过程中,焊接机器人系统一激光二极管为热源,通过激光对局部进行非接触式加热,不需要更换烙铁头,并且激光光束小,能够满足多种环境下的FPC焊接要求。
在激光加热过程中,激光焊接机器人具有微细的点直径,其最小直径仅为0.2mm,能完成电子设备微间距的焊接要求。同时,利用自动激光焊接机器人系统进行FPC焊接时,激光焊接机器人系统能够在短时内完成局部加热,并且加热过程对基板与周边部件的影响不明显(见图1)。
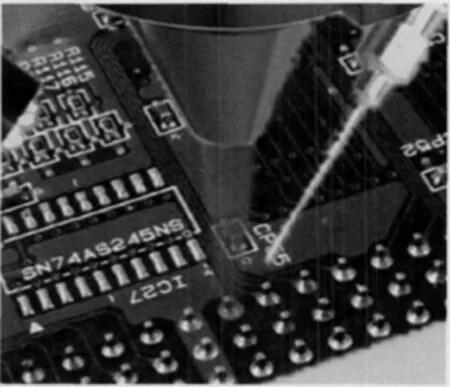
图1 自动激光焊接机器人系统的应用实例图
例如,在对直径为0.3mm的焊球进行激光焊接时,通过自动激光焊接机器人系统能够获得被焊接物体表面的资料,并且完成不同角度的焊接(例如焊球上部形状不变化,但是其底部已经与焊盘焊接在一起)。
从当前自动激光焊接机器人系统的发展情况来看,该技术的出现与发展有效满足了FPC焊接的要求,并在高集成化、小型化方向有了更广阔的发展前景。例如,在当前移动设备集成电路QFP元件焊接过程中,元件的引脚间距已经从最初的1.0mm下降到0.3mm,部件时间的空间越来越小。自动激光焊接机器人系统的出现有效满足了这一需求,在相机和手机的CCD摄像头部件、手机的微型受话器、手机的微型振动器、便携电脑的LCD部件以及微型马达,微型变压器等的FPC焊接,在液晶LED-TV、航空航天军工制造以及高端汽车部件制造等领域也有着广泛应用。
2.2 FPC焊接的激光焊接机器人功能完善
在FPC焊接过程中,为了能够进一步提高焊接质量,人员在利用自动激光焊接机器人系统进行焊接时,需要依靠装置内藏的同轴CCD摄像头与监视装置来获取焊接的实施数据。此时由于指示图像会提示焊接状态,并且激光焊接机器人的焊接过程能够在显示器上同步显示,因此在FPC焊接过程中,技术人员能够通过视觉图像位置的变化,对FPC焊接工件的焊接点进行标定,校正焊接点情况。同时在自动化技术的支持下,技术人员还能利用自动激光焊接机器人完成多种复杂的焊接操作,例如控制激光的照射时间、控制激光焊接机器人的焊接轨迹等。
在应用阶段,可以通过自动激光焊接机器人系统所具有的其他辅助功能来强化焊接质量,例如依靠激光头上的防烟雾光学透镜与保护系统,维修时只需要更换光学透镜即可,整个操作过程简单。
2.3 FPC焊接应用自动激光焊接机器人的参数规划
FPC焊接对自动激光焊接机器人的焊接轨道提出了更高的要求,虽然在自动化技术的支持下,技术人员完全可以利用计算机自动化技术来降低对焊接机器人焊接轨道的干预,但是整个焊接轨道依然存在质量风险。所以为了保证自动激光焊接机器人的焊接轨道能够满足FPC焊接要求,相关人员在技术应用过程中,应该落实空间轨迹与焊接工艺相结合的方式,将激光焊接机器人的空间轨迹与焊接工艺参数进行联合规划,为进一步提高焊接质量奠定基础。为了实现这一目标,在技术应用过程中应该关注以下几点。
(1)考虑到焊接工艺参数规划会因为FPC焊接的材料、形状的变化而发生变化,因此为了能够保证焊接质量能够达到预期,必须要根据上述要求来对焊接工艺参数进行调整,保证焊接缝空间位置变化与焊接工艺要求能够满足FPC焊接的要求。所以在焊接过程中,技术人员必须要根据自动激光焊接机器人的空间轨道变化情况,掌握三维空间下的连续曲线轨迹特征,并将其作为工艺优化的重要标准,最终提高焊接质量。
(2)在激光焊接的情况下,传统焊接模式中的行走角、工作角对FPC焊接质量的影响已经不再明显。但是出于对焊接质量控制的考虑,就应该关注其他会影响焊接质量的要素,包括焊接电流与电压的选择、如何保证熔滴平稳过度等焊接工艺。
在技术应用过程中,技术人员将这些问题与自动激光焊接机器人系统联合在一起,能够持续优化激光焊接机器人的参数规划情况,让自动化激光焊接质量能够满足FPC焊接的质量控制要求。
2.4 自动激光焊接机器人系统在FPC焊接中的发展方向
随着相关技术的进一步发展,自动激光焊接机器人技术将会得到进一步的发展,以更好的满足未来FPC焊接要求。就目前相关技术的发展情况来看,自动焊接机器人系统的加热方式变得更加具有针对性,其对应的表面贴装微细间距焊接,特殊激光束的最小点径要达到0.05mm以下,激光发射形状目前使用圆形外,根据焊盘形状还开发出环形等复杂形状的焊接技巧。随着相关技术的进一步发展,三角形、椭圆形的焊接加热方式正在研发过程中,以适应不同环境下的焊接要求。
总体而言,在电子产品进入到高密度化组装的今天,大量新工艺技术的出现对自动激光焊接机器人功能提出了更高的要求,随着相关技术的进一步发展,大量新工艺技术将会被导入到焊接机器人技术中,以适应未来焊接要求。
3 结语
从本次研究结果可知,自动激光焊接机器人技术的出现有效满足了FPC焊接的要求,在现阶段电子产品生产过程中发挥着重要作用。因此对相关人员而言,必须要了解自动激光焊接机器人技术所具有的技术特征与技巧,了解激光焊接机器人系统在焊接过程的应用技巧与方法,能以焊接机器人空间轨道等为突破口,持续优化自动激光焊接机器人的技术手段与精准度,更好的满足未来FPC焊接要求。
[1] 霍厚志,张号,杜启恒等.我国焊接机器人应用现状与技术发展趋势 [J].焊管,2017,40(02):36-42,45.
[2] 付晓龙,何建萍,王付鑫.焊接机器人轨迹规划的研究现状[J].轻工机械,2015,33(02):110-113.
[3] 陈海永,方灶军,徐德等.基于视觉的薄钢板焊接机器人起始点识别与定位控制[J].机器人,2013,35(01):90-97.
