路虎揽胜星脉(Velar)新技术解析(四)
2018-06-28沈阳金峰
沈阳/金峰
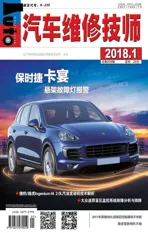
激光LED的操作如图29所示,蓝色细光束被引导至非接触式荧光粉层。荧光粉层将蓝光转换为明亮白光,并将转换后的明亮白光引导至反射镜上,然后反射镜将明亮白光反射到车辆前方最远550m的距离。前照灯中的激光模块带有内置传感器,可检测有害的蓝光泄漏。如果检测到蓝光泄漏,激光功能将被禁用,并且存储一条DTC。出于安全原因,无法通过诊断设备激活激光辅助远光灯。如果客户怀疑激光辅助远光灯未正常工作,首先应检查DTC。如果存储了DTC,应按照建议修复问题。如果没有DTC,应执行夜间试驾,确保满足激活系统的所有条件。
┃图29 激光LED的操作
6.自适应前部照明系统(AFS)
自适应前部照明系统(AFS)如图30及图注如表10所示,照明必须处于自动模式,系统会自动更改行驶光束模式,以适应驾驶条件。AFS 使用车速、转向角度和图像处理模块A 数据来为道路和驾驶条件选择相关的近光灯光束模式。利用输入信息,根据不同的道路和天气条件做出调整,系统即可根据路况选择最理想的近光灯设置,以电子方式调暗或关闭近光灯LED。前照灯内的近光灯LED模块包含一系列LED单元。通过调节各LED的亮度实现不同的光束模式,并通过调节垂直对光束更改光束距离。静态弯道灯还可用于拓宽近距离的光束模式。
┃图30 自适应前部照明系统(AFS)
7.自适应光束调整
自适应光束调整效果如图31所示。自适应光束调整使用与AHB 相同的输入。该系统利用IPMA 检测迎面车辆并关闭相关的远光灯LED模块,可在不使其他道路使用者炫目的情况下提供最大照明。它可在检测到的物体周围形成一个明暗分明、可移动的阴影区域,以实现该功能。这让驾驶员可在更长时间内在打开远光灯的情况下驾驶,无须手动切换照明设置。
激活自适应光束调整的条件是:

┃图31 自适应光束调整效果
◆已选择自动车灯
◆当车速达到40km/h时,可自动激活自适应光束调整
◆IPMA没有检测到路灯
停用自适应光束调整的条件是:
◆可推动或拉动远光灯和近光灯的转向盘开关以停用自适应光束调整。拉动开关将导致远光灯闪烁,因此最好选择推动开关

表10 模式说明
◆当车速减慢到24km/h时,会自动停用自适应光束调整
◆IPMA检测到路灯
◆已记录前照灯DTC
◆前照灯中的多个LED分区不在工作
◆选择倒车挡
如果路况错误,自适应光束调整也可能会受到影响或被停用。
对自适应光束调整操作造成影响的不利条件有:
◆强反射路牌
◆昏暗照亮的道路使用者,比如骑行者
◆恶劣天气状况
◆雨水/光照传感器脏污或被遮挡
◆挡风玻璃被遮挡或受损
◆被部分遮挡的迎面车辆
8.矩阵远光灯装置

┃图32 矩阵远光灯装置
矩阵照明能够以电子方式调暗、增亮和关闭特定LED芯片,以减少对迎面车辆造成的眩光。矩阵远光灯装置如图32所示。该装置包含4 个模块,每个模块均带有一定数量的LED,可通过透镜投射光束以形成前部照明。
◆模块1包含7个LED
◆模块2包含5个LED
◆模块3包含7个LED
◆模块4包含5个LED
矩阵照明系统为视野的每个扇区分配LED。LED通过透镜投射光束,透镜可将LED光束引导到车辆前方的所选区域。可根据视野的哪个部分需要遮蔽照明以防止对其他道路使用者产生眩光,打开和关闭这些LED。在执行这种遮蔽操作的同时,照明系统仍可对道路的其他部分提供最大程度的远光灯照明。可通过前照灯装置控制LED,该装置内部使用了一个名为自适应光束调整的系统,该系统使用IPMA 来检测车辆的迎面车辆和前方车辆。客户可以使用仪表(IC)菜单选择关闭矩阵照明选项。
9.前照灯网络拓扑图
前照灯网络拓扑图如图33所示。BCM/GWM 使用LIN 与前照灯控制模块进行通信。LIN 总线传输信息以向前照灯控制模块告知以下信息:
◆已选择自动模式
◆位置灯点亮
◆日间行车灯点亮
◆侧标志灯点亮
BCM 通过硬接线连接与前照灯控制模块通信以实现以下功能:
◆近光灯开启信号
◆远光灯开启信号
◆方向指示灯选择信号
前照灯控制模块使用前照灯内部算法控制静态弯道灯、自适应光束调整操作、激光辅助远光灯操作和前照灯水平调整。
前照灯控制模块直接连接到高速(HS)控制器局域网(CAN)底盘网络并从以下部件接收信息:

┃图33 前照灯网络拓扑图

┃图34 不同工况下的照明模式
◆图像处理模块A(IPMA)
◆防抱死制动系统控制模块(ABS)
◆动力转向控制模块(PSCM)
◆雨水/光照传感器(通过BCM/GWM)
◆变速器控制模块(TCM)
◆约束控制模块(RCM)
◆底盘控制模块(CHCM)
前照灯控制模块A 是矩阵照明系统的主控制模块。HCMA 通过专用CAN 网络连接到HCMB,并使用这个专用CAN 网络传输用于控制LED照明芯片的信息。
照明系统使用BCM/GWM 提供的信息来选择远光灯和近光灯操作,该系统还提供与方向指示灯操作有关的信息。如果选择了自动模式,矩阵LED照明系统可在满足正确条件时运行,使得远光灯持续开启。
TCM 提供了信息来指明选择的挡位,因为激光辅助远光灯不会在汽车挂入倒车挡时运行。
对于配备自适应前部照明系统(AFS)的车辆而言,要让照明模式和静态转弯灯正常运行,需要提供转向角度雨水/光照传感器与环境光线条件有关的信息,选择自动模式时,该信息可以在环境光线足够暗的情况下自动激活近光灯。
CHCM 利用位于右侧悬架部件上的前后高度传感器,通过HS CAN 底盘向前照灯控制模块提供悬架高度。在所有车型上,前照灯水平调整电机都安装在前照灯装置内。它们可以根据悬架高度传感器数据调节远光灯和近光灯模块。前照灯系统上标配了动态水平调整功能。如果检测到悬架高度问题,当会有2s的延迟以改进准确度。
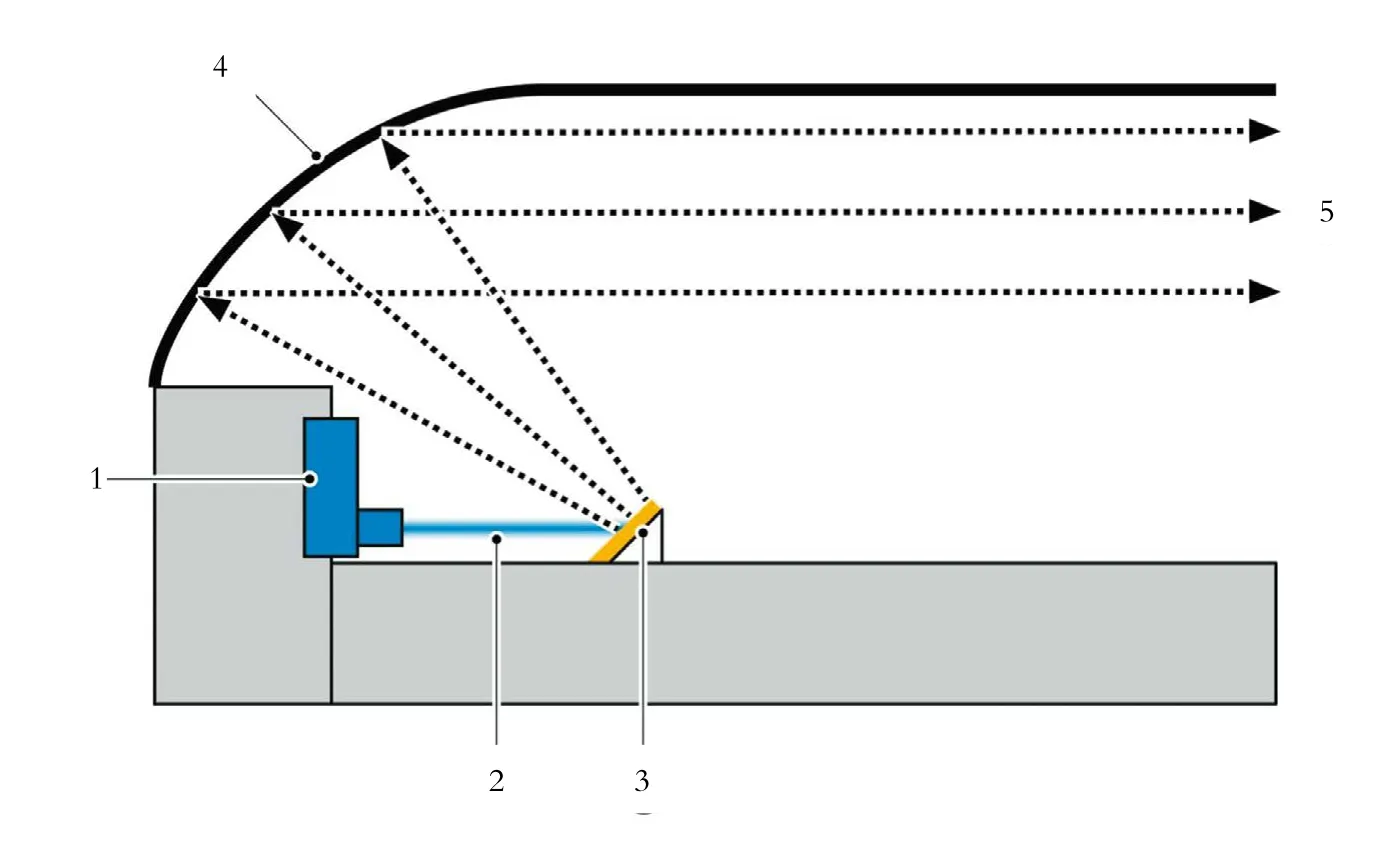
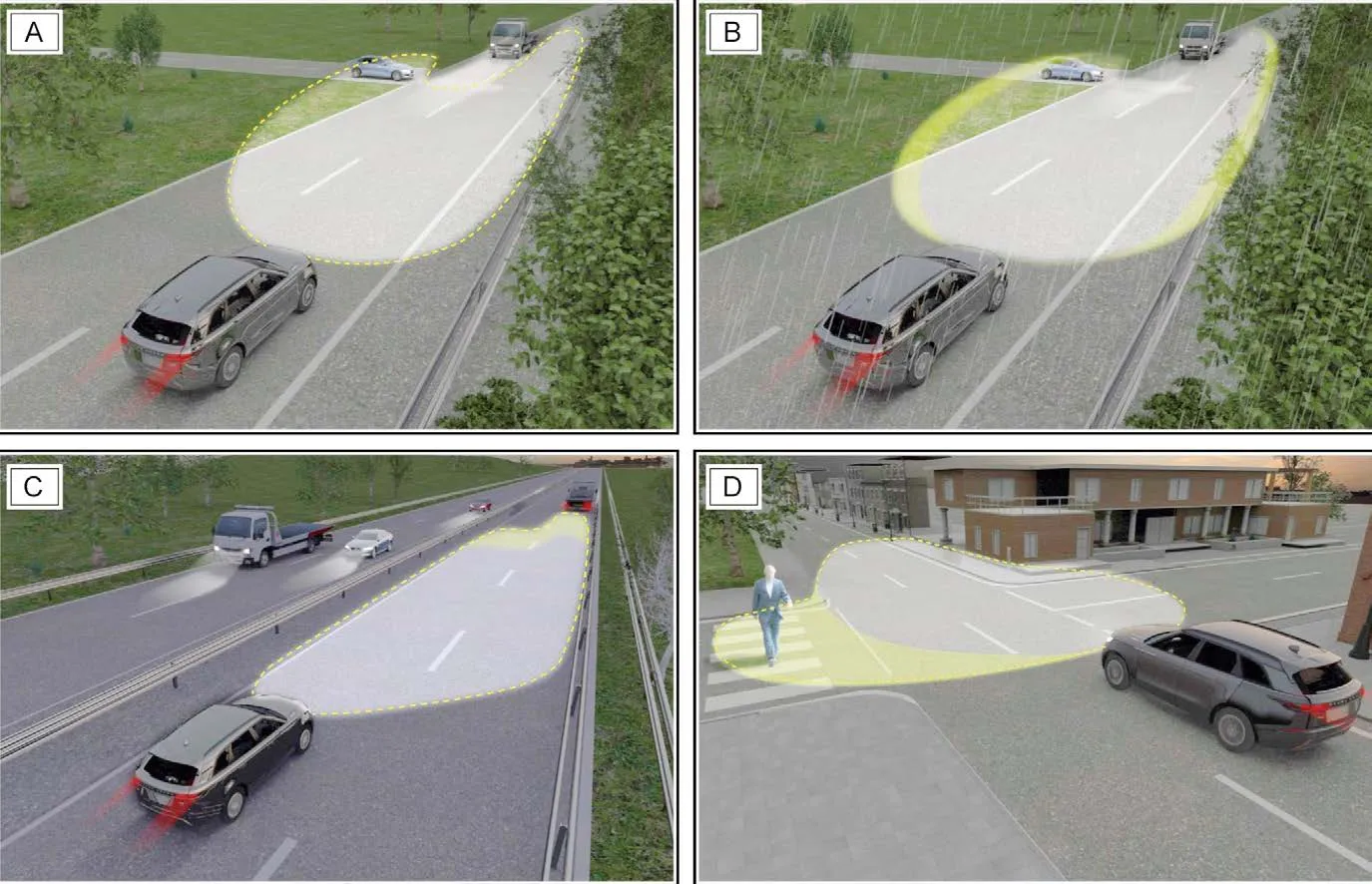
10.不同工况下的照明模式
不同工况下的照明模式如图34所示。