基于仿生的机器人室内地图构建方法的研究
2018-06-27胡雨露黄继鹏
李 伟,胡雨露,黄继鹏
(东北师范大学计算智能研究所,吉林 长春 130024)
0 引言
随着机器人技术的发展,移动机器人逐步应用于人们的日常生活中.地图构建方法作为移动机器人实现自主定位与导航的核心技术引起了众多专家、学者的广泛关注.目前,基于非视觉传感器的地图构建方法,如激光雷达、超声、红外等,可精确测量距离和方位角且受环境影响程度小,但存在成本高、信息量单一的问题.[1-3]相对于非视觉传感器,基于视觉的地图构建方法具有便于实施、可靠性高、信息量大等特点,能够提高系统的灵活性,降低应用成本[4-5],但该方法需要依赖复杂的图像处理技术,来解决地图优化问题,并且得到在特征跟踪和定位的连续上存在不足的全局最优化估计.[6-7]文献[8]对视觉SLAM(Simultaneous Localization And Mapping,SLAM)进行了研究,提出了深度数据模拟激光雷达SLAM的方式,但未对传统的视觉SLAM所存在的问题进行深入研究和改进;文献[9]针对视觉SLAM特征提取慢和极端场景的鲁棒性低的问题,提出了基于GPU加速的SURF特征提取方式,但机器人的硬件环境要求随之提高,增加了成本;文献[10]改进了DVO SLAM(Dense Visual Odometry SLAM),提出了一种基于有效像素点进行关键帧选取的方法,虽然在处理效果和效率上比基于稀疏视觉特征的方法有较大的提高,但是密集算法也引入了更大的计算量.
本文借鉴人类视觉对获取的颜色信息和深度信息进行处理而完成环境标志识别与定位,提出一种仿生的室内地图构建方法,可以有效地解决复杂室内背景中地图构建算法复杂和成本高的问题.
1 室内地图构建的仿生思想
人类对环境的表示是通过对环境中不同标志性建筑或标志性物体的相对位置的记忆来实现的,人构建环境地图的主要信息来源是人的眼睛.人眼的视网膜包括两种感光细胞:视锥细胞与视杆细胞.视锥细胞的特点是感受强光和颜色,产生明视觉,对物体细节和颜色分辨力强.视杆细胞的特点是对弱光敏感,主要负责在昏暗环境中产生暗视觉.另外,人眼对深度信息具有感知能力,可以对物体间的距离有模糊的远近概念.可见,人类对环境信息的理解是通过获取颜色、轮廓、深度和明暗等信息建立的.因此,本文拟从4个方面进行仿生,进行室内地图构建:
(1) 仿生人眼同时获取颜色和深度信息的能力,进行环境中的路径信息识别;
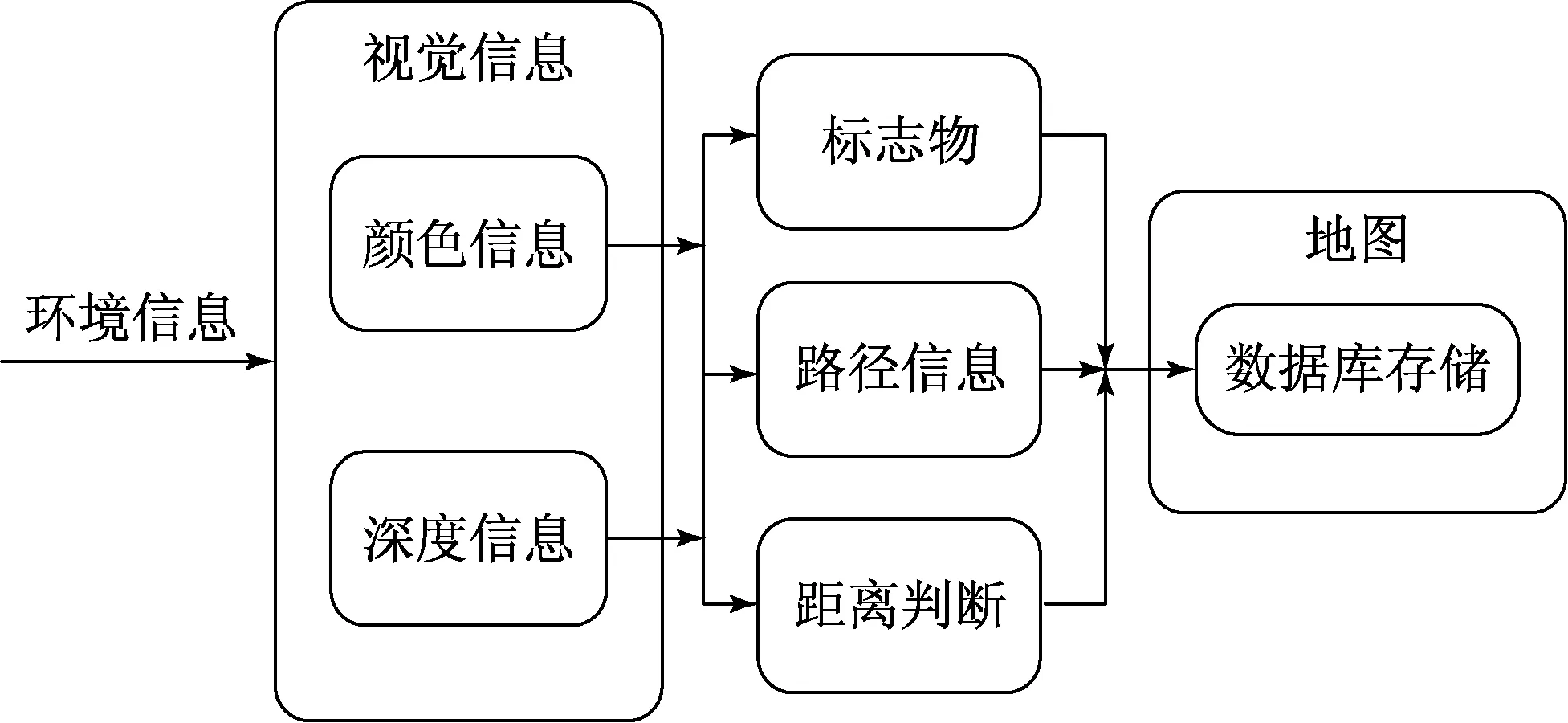
图1 室内地图构建流程
(2) 仿生人类通过识别和记忆环境中的标志物形成地图定位点的方法,采用二维码表示标志物,并识别标志物;
(3) 仿生人类对距离的模糊表示方式,对地图中的标志物间的距离进行表示;
(4) 仿生人类的记忆功能,采用数据库存储所构建的地图.
机器人室内地图构建的具体过程如图1所示.
2 仿生路径获得方法
当不同波长的可见光进入人眼后,相应的视觉细胞会把不同可见光产生的电信号传送到大脑的视觉中枢,获得环境的颜色信息.而人的左右眼对同一环境信息所获取的图像存在差异,图像的差异可以显示环境的深度信息.因此,人眼不仅能得到环境中的颜色信息,还可以得到深度信息.本文选用Microsoft公司的Kinect体感器获取环境的颜色信息和深度信息,并进行相应处理获得路径信息.具体方法如下:
(1) 首先用实际距离对Kinect所获得的深度信息进行标定;
(2) 将Kinect所获得的图像变换到HSV空间,获得机器人正前方景物的颜色信息;
(3) 将图像中与地面颜色一致部分的像素值保持不变,不一致部分设置为黑色,得到只有黑色和道路颜色的区域;
(4) 通过深度信息获得机器人前方道路可行驶空间的距离.若深度信息小于设定值,则认为前方已有障碍物,不可前行.然后根据深度信息,判断图像中障碍物的左右两侧是否有道路及可行驶空间距离.
图2为道路识别对比图,其中图2(a)为室内的原始场景,图2(b)为经过上述算法处理得到的路径图,并根据深度信息确定了可行驶距离.

(a)室内原始场景
通过该方法处理后,可以得到机器人直行的距离和遇障碍物后的转动方向.从图2(b)中可以得到机器人的直行距离最远是405 cm,在该路径的左边有障碍物并且障碍物左侧有一条275 cm的路径.若此时机器人面对的是355 cm处的障碍物,则会得到左右有2条路径供选择.图2中的中间线表示机器人正前方方向.
3 仿生距离表示方法

图3 模糊集隶属度函数曲线
人对于距离并没有准确的概念,对路径的描述通常也采用模糊的方式.因此机器人完成路径识别后,对可运行距离采用模糊集进行表示.由于目前市场上视觉传感器的工作能力有限,机器人可识别路标的极限距离设定3 m,同时设定40~90 cm为机器人可以进行路标识别的最佳距离.根据这两个限定条件给出机器人的路径距离的5个模糊集:d1表示“近”、d2表示“较近”、d3表示“较远”、d4表示“远”和d5表示“很远”,轮域X= {(30,300)},单位为cm,利用参照法分别求出对应的隶属度函数.模糊集隶属度函数曲线见图3.
通过视觉传感器获得了路径的具体距离信息x,分别将x带入上述5个模糊集的隶属度函数中求出对应的隶属度,隶属度最大的模糊集便是该距离下机器人对环境路径的距离判断.
4 仿生地图记忆方法
根据经验得知,人记忆环境是人行走时将所遇的标志物及标志物之间的相对位置不断记忆的过程.人描述环境是从环境中某标志物经过大致运动过程到另一标志物.所以对机器人而言,构建地图的过程是将运动时的路径和所见路标信息进行存储的过程.本文利用数据库对机器人的运动信息进行记录存储,形成地图.
地图数据库相当于机器人路径记忆的“大脑”.因此,该数据库分别存储机器人运动路径中直行的模糊距离、转动方向和人工路标等三方面内容(见表1).
表1路标数据库存储字段及其含义

字段含义label当前机器人所处的路标编码direction机器人的转动方向distance机器人沿道路直行的模糊距离target机器人到达的路标编码
如表1所示:数据库中第1个“label”字段存储的是当前机器人所处的路标编码;第2个“direction”字段存储的是机器人的转动方向,该字段下有“0”、“3”、“4”三种编码,其中0表示原地不动,3表示右转,4表示左转;第3个“distance”字段存储的是机器人沿道路直行的模糊距离.为方便数据的存储和查询将距离模糊集进行编码:“1”表示近、“2”表示较近、“3”表示较远、“4”表示远、“5”表示很远;第4个“target”字段表示到达的路标编码.从label字段对应的路标,经过一次转动得到一条直行路径并且得到到达target字段路标编号所需要行驶的距离.从表1可以看出,数据库存储的内容是由不同路标及路标间路径构成的空间缩影.
5 方法测试与结果

图4 室内机器人
本文采用如图4所示的机器人对室内地图构建方法进行验证.该机器人采用冯哈勃直流电机提供动力,采用Kinect体感器模拟人眼获取颜色和深度信息,信息处理由配备1.86 GHz CPU、内存为4 GB的嵌入式PC机完成.
为了方便标志物的识别,用二维码表示的人工路标固定在标志物上,机器人只需识别二维码就可以获取标志物信息.图5(a)和(b)分别为人工路标的样式、检测结果,机器人利用Hough变换对轮廓为圆形的人工路标进行检测,检测到的路标用圆标出.

(a)人工路标
为了验证地图构建的可行性,在教室环境下设置了14个路标,如图6所示,其中三角形表示机器人初始位置,让机器人从该位置自主移动.在运动过程中机器人会将所识别到的路标、路径及相对距离在数据库中进行记录,记录结果如表2所示,表2实现了用数据库对室内地图的表示.
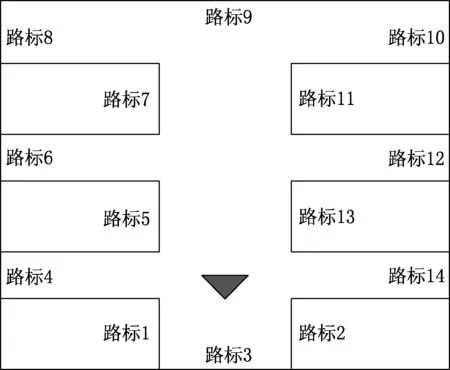
图6 人工路标识别结果及路标设置表2 数据库路径储存结果

labeldirectiondistancetarget3334434131341553311114177429933101035883411114466441313323
6 结论
本文借鉴人眼感知环境信息的方式,采用模糊集表示距离,利用图像信息和深度信息完成路径的识别.选用人工路标作为地图中的定位点,采用数据库中对路径和人工路标进行存储,最终形成了室内空间的地图.利用模糊集表征距离相比于利用激光雷达、编码器或深度视觉构建里程计的方法更有效地减少了机器人测距环节的计算量,同时也简化了数据库对位移信息的存储.该方法有效地解决了当前主流地图构建方法中存在的数据量大、算法复杂的问题.
[参 考 文 献]
[1] LEONARD J,HOW J,TELLER S,et a1.A perception-driven autonomous urban vehicle[J].Journal of Field Robotics,2008,25(10):727-774.
[2] THRUN S,MONTEMERLO M,DAHLKAMP H,et a1.Stanley:the robot that won the DARPA grand challenge[J].Journal of Field Robotics,2006,23(9):661-692.
[3] OLSON E.Robust and efficient robotic mapping[D].Cambridge:University of Cambridge,2008.
[4] 包加桐,宋爱国,唐鸿儒,等.基于视觉目标跟踪的侦察机器人导航方法[J].东南大学学报(自然科学版),2012,42(3):399-405.
[5] 张海波,原魁,周庆瑞.基于路径识别的移动机器人视觉导航[J].中国图象图形学报,2004,9(7):853-857.
[6] SE S,LOWE D G,LITTLE J.Vision-based global localization and mapping for mobile robots[J].IEEE Transactions on Robotics.2015,21(3):364-375.
[7] ZHANG X,RAD A B,WONG Y K.Sensor fusion of monocular cameras and laser rangefinders for line-based simultaneous localization and mapping (slam) tasks in autonomous mobile robots[J].Sensors,2012,12(1):429-452.
[8] 李策,魏豪左,卢冰,等.基于深度视觉的SLAM算法研究与实现[J].计算机工程与设计,2017,38(4):14-16.
[9] 龙超.基于Kinect和视觉词典的三维SLAM算法的研究[D].杭州:浙江大学,2016.
[10] 刘静雯.基于Kinect的密集视觉里程计SLAM算法研究[D].西安:西安电子科技大学,2015.
