基于Edge Boxes的大型车辆车标检测与识别
2018-06-26李熙莹江倩殷袁敏贤
李熙莹 ,吕 硕 ,江倩殷 ,袁敏贤 ,余 志
1.中山大学 工学院 智能交通研究中心,广州 510006
2.广东省智能交通系统重点实验室,广州 510006
3.视频图像智能分析与应用技术公安部重点实验室,广州 510006
1 概述
大型车辆车标检测与识别是基于计算机视觉与车辆先验知识,准确且有效地获取车标对象及其精细类别。大型车辆车身长、惯性大、驾驶困难,更容易出现违法、违规行为,因此需要准确且有效地监督车辆行为、获取车辆信息。现今车辆类型识别系统可以有效地区分部分相似性较小的车辆款式,但仍难以区分大型车辆,主要难点在于不同大型车辆厂家的车辆款式相似性较大,但同一厂家的不同车型相似性较小,因此正确地检测及识别大型车辆车标将有利于车辆身份的确定。传统的大型车辆车标信息是通过车牌信息与远端数据库交互进而获取得到,但在面对假套牌或遮挡号牌等情况时,该方式难以获取车辆的车牌、车标及其他车辆信息,从而无法针对违规违法车辆进行执法管理。为了解决这一问题,基于计算机视觉和车辆图像理解的车标检测与识别受到了广泛地重视[1-2]。
传统的车辆车标检测与识别算法大多针对小型车辆车标进行检测,大型车辆车标检测算法研究相对较少。小型车辆车标多为符号型车标,空间位置临近车辆散热器栅格,而大型车辆车标可分为三类:符号型车标、字符型车标以及混合型车标,如图1所示,同时大型车辆车标的空间位置不定,仅能粗略定位于车窗与车牌之间的区域,此外字符型车标各个字符位置相对较为离散,混合型车标两种车标的取舍、车标背景的复杂性等都导致了大型车辆车标难以得到准确地检测。此外现实环境如阴影、遮挡、摄像头位置等条件的影响,很容易干扰大型车辆车标检测的准确性。同时,大型车辆车标检测与识别系统对算法实时性也有着较高的要求,因此如何在提升检测与识别准确率的前提下保证实时性也是本研究的重点[3]。

图1 大型车辆车标类型
大型车辆车标检测与识别问题可以大致分为大型车辆车标检测与大型车辆车标识别。大型车辆车标识别与小型车辆车标识别已得到广泛的研究,并形成了相对成熟的解决方法[4-5]。Psyllos[6]利用多视角SIFT,Huang[7]和Zhang[8]利用深度学习,余烨[5]利用随机混合局部特征等针对百余类车标都取得了较为准确的识别效果。这些方法通常采用人工定位的车标进行识别算法的研究,因此准确且快速地检测车标成为车标检测与识别问题的难点。
现今的大型车辆车标检测根据其原理通常可以分为背景消除法和目标匹配法。背景消除法利用车辆的先验知识,根据车标的颜色、纹理等特征,消除车标背景,从而检测车标。杜小毅[9]等结合SURF、SIFT(Scale-Invariant Feature Transform)和车标边缘特征进行车标背景消除进而进行车标快速检测;Mao[10]利用车标背景栅格的纹理特征进行车标背景消除,从而定位得到车标。Wang[11]提取车标纹理特征,利用滑动窗口直接进行检测;李玲[12]和杨文文[13]分别通过Sobel算子和Laws算子对背景进行消除,进而准确检测车标;刘玉松[14]利用车标的边缘投影特征,消除车标背景,进而检测车标;这种方法结合了车辆的先验知识,能够快速地检测车标,但无法准确区分大型车辆车标类型,因此当车标空间位置不定或背景较为复杂或受光照等条件影响时,算法的鲁棒性会受到极大的影响。目标匹配法首先构建合适的目标模型,利用滑窗等方法,多尺度地检测车标。Psyllos[15]等利用滑窗,通过提取窗口图像多个视角的SIFT特征,然后和数据库中已有的模板图像进行匹配,根据相似度检测车标;Wang[16]等利用模板匹配结合车标先验知识对滑动窗口图像进行检测,根据匹配度检测车标;Gu[17]等利用滑窗,通过多尺度的稠密SIFT特征检测车标;可以通过多尺度调整滑动窗口大小和步长,精确地检测并识别车标,但该法计算复杂度高,耗时大,难以满足实时需求。
针对以上问题,本文提出了一种基于Edge Boxes的大型车辆车标检测与识别方法。为了保证车标检测与识别的实时性和复杂场景下的有效性,本文利用Edge Boxes算法在车标候选区内约束地提取目标区域,由于目标区域类别未知,因此将目标区域送入利用线性约束编码[18](Spatial Pyramid Matching based on Sparse Coding,ScSPM)构建的车标检测模型和车标识别模型进行训练与识别,进而检测车标区域并识别车标种类,整体算法框架如图2所示。实验结果表明,本文算法在大型车辆车标检测与识别问题上是准确、快速且有效的。

图2 大型车辆车标检测与识别算法流程图
2 算法流程
2.1 基于空间结构关系的大型车辆车标候选区
大型车辆的车标与车牌、车窗的空间位置结构关系:一是车标位于车牌上方与车窗下方所包含的范围内[19];二是车标位置通常基于车牌中轴线对称。根据特性1,即可利用车牌和车窗位置得到车标粗定位图像。本文利用车辆边缘图像的边缘特征密集程度进行车标粗定位车窗定位,如图3所示。

图3 车标粗定位
检测区域的大小直接影响整体算法的时间消耗,为同时保证算法检测准确率及实时性,在获得车标粗定位图像后,利用特性2,根据车辆中轴线得到车标候选区图像,如图4所示。

图4 车标候选区
利用车辆中轴线,首先定位车标候选区1,进行车标检测与识别。当识别为单个字符时,以字符高度的1.5倍作为车标候选区3的高,定位车标候选区3,继续进行车标检测与识别;当所获车标区域皆为单个字符,根据字符的空间位置进行组合,形成字符串车标,再次进行车标识别;当识别为具体的字符串车标或符号型车标类别时,算法结束;当未检测到任何目标时,扩增候选区,定位车标候选区2,继续进行车标检测,若仍未检测到任何目标,舍弃车标候选区1,继续向外扩增车标候选区进行车标检测。这种算法将大幅度消减大型车辆车标检测与识别算法的时间消耗。
2.2 车标精细定位
2.2.1 基于Edge Boxes算法的目标区域确定
Edge Boxes算法是一种经典、快速的图像分割算法,通过对边缘图像内具有大小、方向等特性相似的边缘进行组合,从而获得若干个目标区域[20]。本文Edge Boxes算法应用步骤如下:
步骤1对车标候选区图像,利用基于结构森林的边缘图像检测算法获取车标候选区边缘图像。
步骤2计算每个边缘点的大小和方向,并利用非极大值抑制算法获取相对稀疏的车标候选区边缘图像。
步骤3计算稀疏车标候选区边缘图像中两两相邻边缘点间的方向差,将近乎一条直线的边缘点合并为一条边缘si,并计算两两边缘间的相似度a(si,sj),重复该步骤,获取边缘集合S和相似度集合a(si,sj为区域i,j)。
步骤4利用穷举搜索算法获取若干个候选目标区域,计算候选目标区域b内各边缘的权值wb(si),并根据边缘的权值计算该候选目标区域的得分hb。
步骤5将得分高于某一阈值H的候选目标区域添加至目标区域集合R中。
步骤6对该部分目标区域重复步骤4、步骤5,获取完整的目标区域集合。
本文利用基于结构森林的边缘图像检测算法[21]获取初始边缘图像,该算法以结构化的像素标签为基础,利用随机决策森林学习训练图像并获取结构边缘模型,通过该模型获取图像的边缘。该算法可获取具有高准确率的图像边缘,因此本文利用图像边缘间的大小、方向等相似特性获取目标区域。
非极大值抑制:初始边缘图像过于紧密,需要通过非极大值抑制对其进行稀疏处理。获取初始边缘图像每个边缘点 p的大小mp和方向θp,将图像分割成若干个r×r大小的区域,对每个区域利用非极大值抑制进行稀疏处理,边缘点 p的值 pnms计算公式如下:

边缘集合:通过寻找边缘点的8连通区域,将两两边缘点间的方向角度差的和大于90°的边缘点组合为边缘si,根据两两边缘的方向特性获取边缘间的相似度a(si,sj),边缘间相似度越大越可能属于同一物体。

其中,θi,θj表示边缘 si,sj的角度,θij表示两边缘间的夹角,γ是常量,表示敏感程度。
边缘权值:候选目标区域内属于同一物体的边缘具有更高的相似度,因此应保证该部分边缘具有更高的权值。

其中,T表示从候选目标区域边框开始到达si的边缘序列集合。
边缘序列集合为边缘集合提供了行/列的位置信息,这大大减少了边缘权值的计算复杂度。
候选区域得分:当候选目标区域含有更完整、更纯粹的目标边缘集合时,应保证该候选区域获得更高的得分hb。

其中bw,bh表示候选目标区域的宽、高,mi=∑mp,表示边缘si内边缘点大小mp的和,κ为常量,表示敏感程度。
理想的目标区域应仅包含所需要的目标,因此目标的外部边缘对目标区域的影响程度更大。本文定义hinb减少目标内部边缘对目标区域得分的影响。

其中b'w,b'h表示内部区域的宽、高,本文设置其为bw/2,bh/2。
2.2.2 车标检测
Edge Boxes算法将图像根据边缘相似度分割成若干个具有相似特性的区域,但无法确定车标区域,本文利用线性约束编码构建车标检测分类器确定车标位置。
线性约束编码算法是一种应用广泛的分类器算法。该算法首先提取目标图像的局部区域特征,然后利用预先训练生成的词典和线性编码构建的语义表达模型对目标图像特征进行编码映射,得到含有语义信息的图像表达向量,接着利用空间金字塔匹配算法为图像表达向量加入空间位置信息,得到最终表达向量,最后把每幅图像的最终表达向量放入线性支持向量机进行训练和识别。
图像的最终表达向量是图像局部区域特征经由稀疏编码及空间金字塔映射得到的稀疏非线性特征。相较于传统的局部区域特征,该特征对图像信息的表达能力更强且更鲁棒,同时线性约束编码算法输出的最终表达向量属于稀疏的非线性特征,因此利用线性SVM作为分类器即可对特征进行有效地区分,并且线性SVM的使用避免了核化SVM的高时间消耗。车标定位模型训练过程如图5所示。
车标定位模型选取人工标注得到的小型车辆车标、大型车辆车标以及字符型车标常见的单个字符作为正样本,选取大小随机且与车标重合度小于20%的样本作为负样本,正负样本数量比为1∶3,利用线性约束编码算法进行训练和测试。本文采用迭代训练的方式,在迭代训练过程中,将错分为车标的负样本加入训练集中,再次进行训练,直至收敛。最后得到车标定位分类器。
利用车标定位模型区分出车标区域,定位车标位置。当同一车辆检测到多个车标时,利用车标定位分类器对车标区域打分获取车标定位结果。
2.3 车标识别
本文利用线性约束编码训练多分类的车标识别分类器对车标定位结果进行识别。车标识别分类器训练过程如图6所示。
车标识别分类器选取人工标注及Edge Boxes定位得到的车辆车标及部分字符型车标常见的单个字符作为每类车标的样本,利用线性约束编码算法进行训练和测试,采用迭代训练的方式,训练得到车标识别分类器。
如图6所示,由于大型车辆部分字符型车标,字符间间隙较大,Edge Boxes算法无法完整定位车标区域,仅能定位字符串中的单个字符,因此车标识别分类器难以准确识别车标种类。针对这一问题,本文的车标识别模型将单个字符作为一类车标进行学习:当车标识别为单个字符时,根据该字符的空间位置重新定位车标候选区,进一步进行车标的定位;当车标识别结果为某类车标时(非单个字符),即可确定该车的车标类型(当同一车辆识别两种车标时,以模型打分为准)。该方法能够兼顾字符型车标、符号型车标以及混合型车标,能够保证在未知车标类型的前提下,进行准确的车标定位。
2.4 整体算法时间复杂度
本文整体算法的时间复杂度与各主要构成算法密切相关,通过分析各主要构成算法的时间复杂度以确定本文整体算法的时间复杂度。
算法 基于Edge Boxes的大型车辆车标检测与识别
输入:卡口车辆图像I
输出:车标识别结果logor
根据车牌与车窗位置获取车标粗定位图像Ic
初始化识别结果:logor=∅
whilelogor=='单个字符'

图5 车标检测分类器训练过程
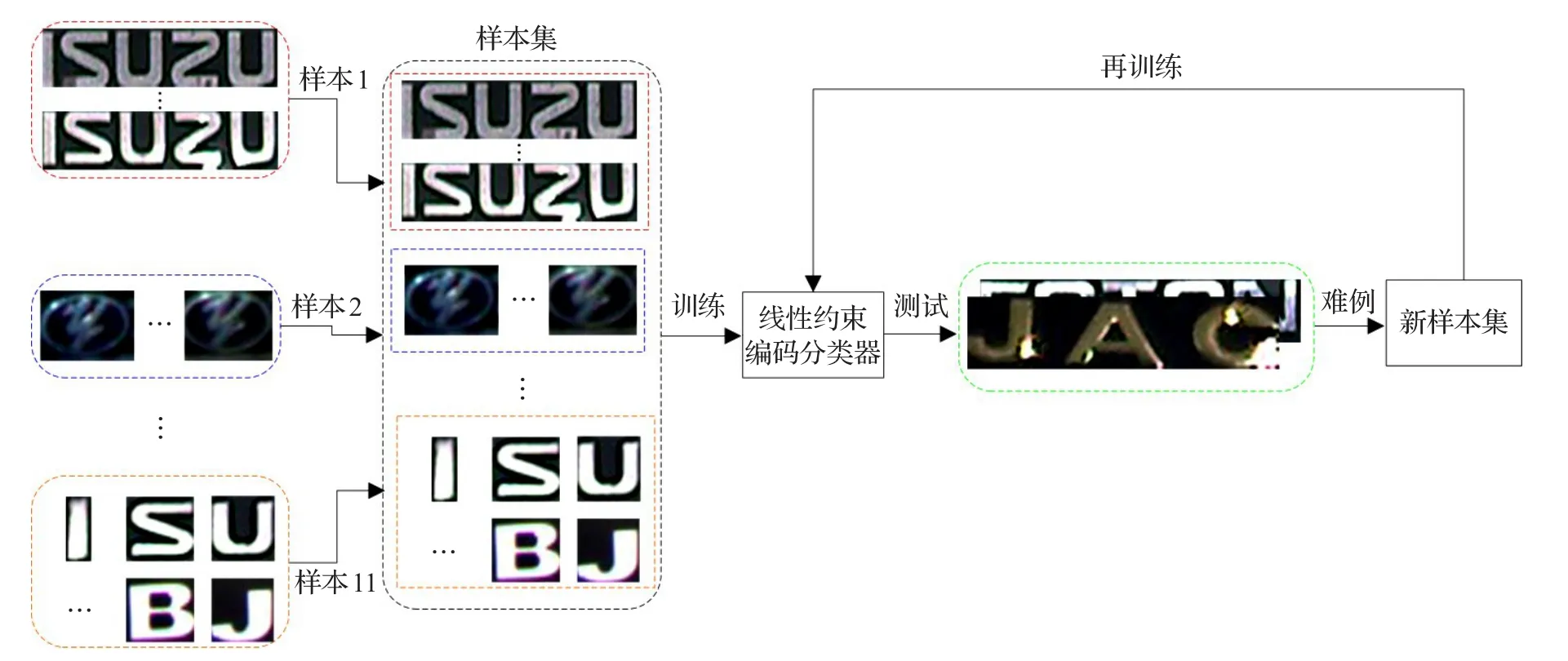
图6 车标识别分类器训练过程
获取车标候选区:logoc=candidate(Ic)
//时间复杂度为O(1)
获取目标区域:logot=EdgeBoxes(logoc)
//时间复杂度为O(n2),目标区域数量为X
获取车标区域:logol=VLC(logot)
//时间复杂度为O(Xn),车标区域数量为D
获取车标结果:logor=VRC(logol)
//时间复杂度为O(Dn)获取车标识别结果:logor
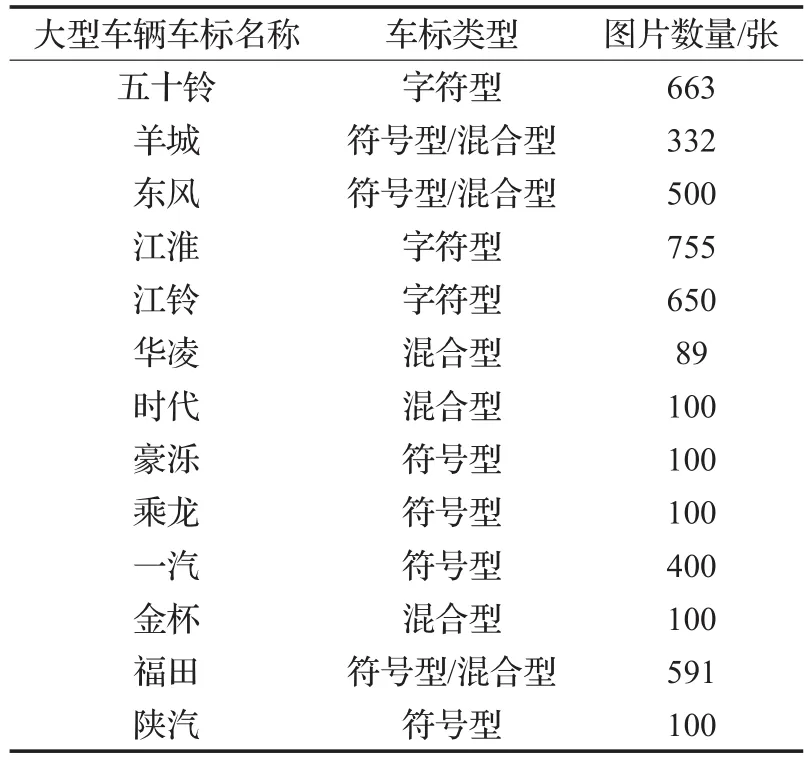
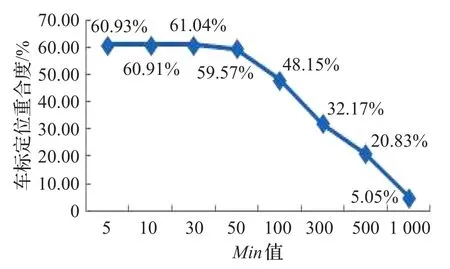
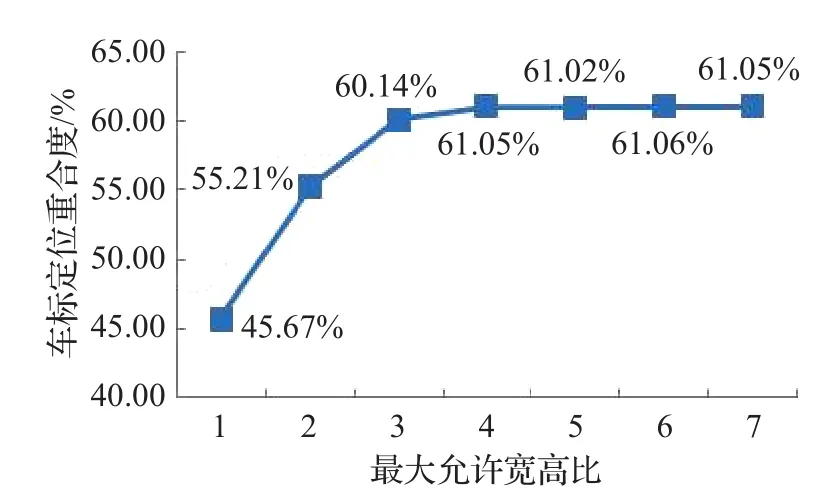
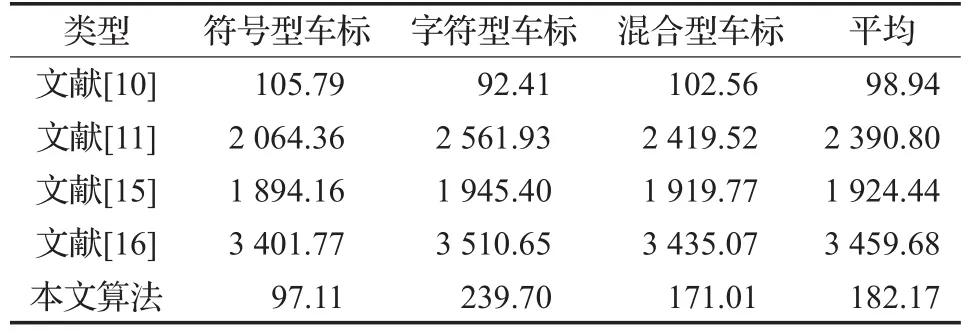
以上可知,车标候选区算法时间复杂度为O(1),Edge Boxes算法的时间复杂度为O(n2),车标定位与车标识别的时间复杂度为O(Dn),因此全文算法的时间复杂度为O(n2),时间复杂度低,计算速度较快,传统的车标检测与识别算法[14-15],利用滑动窗口获取目标区域,目标区域数量为Y(X< 为了验证车标检测与识别算法的有效性,本文选择通过对实际卡口采集到的车辆数据集进行测试。 实验数据集包含实际应用中常见的车辆品牌、型号,整个实验数据集共有4 480张图像(训练图像为1 800张,测试图像为2 680张),其中包含有10类车辆品牌13类车辆品牌,50类车型,每类车型图片40~100张,其中符号型车标共计1 173张,混合型车标共计1 147张,字符型车标共计2 068张。数据集信息见表1。 本文实验数据集图像是在日夜两个时间段定比例、随机地从实际卡口车辆图像中采集得到,通过人工去除车标遮挡、缺失的车辆图像。由于数据集的图像都是处于不同光照和天气条件下的,因此本文数据集可以一定程度地代表实际卡口情况。数据集中所有车辆图像的车牌位置、车标位置均有手工标定作为算法检测依据。部分数据集如图7所示。 表1 大型车辆车标数据集信息 图7 数据集各车辆车型图像示例 在实际的测试过程中,实验将会使用基于图表示的图像分割算法生成初始分割区域,设置其允许最小区间大小的初始值Min=10,最大宽高比为10,接着采用LibSVM[22]工具包进行车标定位分类器和车标识别分类器的训练与测试,其中松弛变量初始设置为10。实验平台为8 GB内存,3.30 GHz的CPU的PC机,开发环境为MATLAB R2012a+VS2012。 实验过程中,车标检测的判断基准为车标定位准确率,如式(6)所示: 其中Overlap(gj,Ij)为车标定位准确率,gj为本文算法得到的车标区域 j,Ij为人工定位的车标区域 j。 车标识别的判断基准为车标识别准确度,如式(7)所示: 其中Accuracy为车标识别准确度,right为正确识别的数量,wrong为错误识别的数量。线性约束编码算法是一种强制识别算法,因此本文不考虑车标未识别的情况。 本文算法是对现有车标检测与识别算法的进一步改进,通过对车标候选区的定位、Edge Boxes算法以及车标定位和车标识别分类器进行分析,并与现今主流的车标检测与识别算法进行车标识别准确率和整体算法计算速度的对比。 线性SVM相对于核化SVM的时间复杂度低,因此利用线性SVM能够极大地减少算法的时间消耗。 由图8可知,利用线性约束编码所获取的最终表达向量是一种稀疏的非线性特征,因此利用线性分类器即可对该特征进行有效的区分。 图8 不同核函数下车标识别率 SVM中的松弛变量影响车标识别准确率及时间消耗,因此本文综合考虑车标识别准确率与时间消耗以确定松弛变量的大小。 由图9可知,当惩罚因子为10时,车标识别准确率较高,因此本文选择惩罚因子为10。 图9 不同惩罚因子下车标识别率 区域的精确分割是影响车标检测准确率的重要因素,本文区域分割是依据Edge Boxes算法定义的边缘相似度进行判断。在不同的最小允许得分下,相似边缘组合将会对车标检测准确率产生极大的影响。本文固定Min值和最大宽高比,以车标定位重合度最优为目标选取最小允许得分。 由图10可知,最小允许得分值越小,车标定位准确率越高,这是因为随着最小允许得分的减小,低得分的目标区域增多,这样Edge Boxes算法能够在光照、阴影等条件的影响下更有效地获取目标区域。当最小允许得分减小至0.03时,车标定位重合度不再上升且趋于平缓,原因是在车标检测这一问题上,车标区域的得分不会过低,影响车标检测准确率。因此,本文选取最小允许得分为0.03。 图10 不同最小允许得分下车标定位重合度对比图 Edge Boxes算法通过对相似边缘的组合形成分割区域。如果分割区域过小,使得小区域的得分过高,从而导致车标检测准确率的下降,同时算法计算量的增大使得耗时过长;如果分割区域过大,受车标背景及车标大小的影响,车标区域定位准确率降低,影响车标检测与识别。因此本文设计一个实验确定合适的最小区间大小Min值以保证车标检测准确率及算法实时性。 如图11可知,最小区间大小Min值越小,车标定位准确率越高。这是因为随着Min值的减小,车标的区域特性增强,算法能够有效地区分车标及其背景区域。当Min值减小至30时,车标定位准确率开始略微下降,原因是当Min值继续减小,车标区域进一步细分,噪声区域得分增大,使得同一物体区域分割为不同区域,影响车标检测准确率。因此,根据实验结果,本文初始分割区域Min值为30。 图11 不同Min值下车标定位重合度对比图 车标大小不一、形状不定,但车标本身的宽高比具有一定共性,因此本文根据目标最大允许宽高比对整体车辆车标定位准确率的影响进行最大宽高比的选取。 如图12所示,最大允许宽高比越大,车标定位重合度越高。这是因为车标本身拥有固定的宽高比,随着宽高比的增大,车标区域检测准确率越大。当宽高比增大至4时,车标定位重合度不再上升且趋于平缓。这是因为不同类型车辆车标大小、车标形状皆有不同,但具有固定的宽高比,因此当宽高比达到某一上限时,车标定位重合度趋于平缓,本文选择最大允许宽高比为4。 图12 不同最大允许宽高比下车标定位重合度对比图 确定好算法的参数后,本文算法将与四种车标检测与识别算法进行车标定位重合度及车标识别准确率的比较:车标定位重合度/车标识别准确率对比结果如表2所示。 由表2可知,文献[10]利用纹理特征区分车标与车标背景,对于字符型车标,由于其车标背景简单,因此车标检测率较高,但是混合型车标和符号型车标的车标背景较为复杂,导致车标定位重合度的下降以及车标识别准确率的降低;文献[11,15-16]利用不同的学习算法学习得到的车标模型,利用滑窗,通过多尺度的检测,从而检测车标,这种方法对三种大型车辆车标的检测准确率较高且较为一致,但由于车标大小不一,形状不定,影响定位的有效性,导致车标定位重合度和车标识别准确率较低;本文算法通过Edge boxes算法检测大型车标,并通过线性约束编码检测与识别车标,这种方法能够有效地检测三种大型车辆车标,从实验结果来看,在车标定位重合度和识别准确率方面,本文算法优于以上四种算法。 实时性是衡量车标检测与识别算法有效性的另一指标,准确且快速的车标检测与识别系统更符合实际需求,如表3为五种车标检测与识别算法与本文算法的计算速度对比。 表3 车标与识别时间消耗对比 ms 文献[10]利用车标与车标背景间的纹理差异,能够快速检测车标,耗时较短;文献[11]提取车标纹理特征,通过滑动窗口对车标进行检测,因此速度较慢;文献[15]利用多视角SIFT提取滑窗特征,通过关键点匹配进行车标定位与识别,计算复杂度最大;文献[16]利用大型车标进行模板匹配,计算复杂度高,因此时间消耗最大;本文提出的车标检测与识别算法通过车标候选区与Edge Boxes算法进行车标检测,同时由于线性约束编码采用线性分类器,所以计算速度明显优于穷举搜索法等传统车标检测与识别算法。 本文算法综合考虑车标检测与识别准确率和计算速度,在车标检测与识别实时性的基础上,保证了车标检测与识别的准确率。通过与其他车标检测与识别算法的对比,本文算法在车标检测与识别准确率和运算速度都取得了优秀的成绩。 本文算法未考虑卡口车辆车标存在遮挡、缺失的情况。根据本文算法原理,车标遮挡、缺失会造成算法运算速度的指数型增长,这也是下一步工作亟待解决的问题。 大型车辆车体宽、车身长、难驾驶、易出事故,准确且有效地识别大型车辆身份亟待解决。针对现今大型车辆相似性高的特点,利用车标信息辅助车辆识别是一种有效获取车辆身份的方法。本文提出一种基于Edge Boxes算法的大型车辆车标检测与识别算法。针对现今大型车辆车标检测与识别算法三大难点:大型车辆车标空间位置不定、车标难以定位和车标难以定位完整,本文充分利用车标与其他车辆部件空间位置关系,提出车标候选区这一概念,以此保证了空间位置不定的大型车辆车标检测的准确性;本文同时利用Edge Boxes算法,在精确检测字符型、符号性和混合型车标位置的基础上保证了算法的实时性;本文构建的串联线性约束编码分类器——车标定位分类器和车标识别分类器,定位结果与识别结果相互反馈,同时保证了车标检测与识别的准确性,并且有效地解决了车标难以检测完整的难题。实验结果表明,本文算法在大型车辆车标检测与识别这一问题上是准确且有效的。 在实际应用中,针对无车标或车标遮挡现象的处理是下一步工作急需解决的难题。 [1]Xia Y,Feng J,Zhang B.Vehicle logo recognition and attributes prediction by multi-task learning with CNN[C]//InternationalConferenceon NaturalComputation &Fuzzy Systems&Knowledge Discovery,2016. [2]Tafazzoli F,Frigui H.Vehicle make and model recognition using local features and logo detection[C]//8th International Symposium on Signal,Image,Video and Communications,At Tunis,Tunisia,2016. [3]Xiang Z,Zou Y,Zhou X,et al.Robust vehicle logo recognition based on locally collaborative representation with principalcomponents[C]//Sixth InternationalConference on Information Science&Technology,2016. [4]尹瑞雪.基于数字图像的车辆信息识别的研究与应用[D].北京:北京交通大学,2016. [5]余烨,聂振兴,金强,等.前背景骨架区域随机点对策略驱动下的车标识别方法[J].中国图象图形学报,2016,21(10):1348-1356. [6]Psyllos A,Anagnostopoulos C N,Kayafas E.Vehicle model recognition from frontal view image measurements[J].Computer Standards&Interfaces,2011,33(2):142-151. [7]Huang Y,Wu R,Sun Y,et al.Vehicle logo recognition system based on convolutional neural networks with a pretraining strategy[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(4):1-10. [8]Zhang Li,Zhang Dongming,Zheng Hong.Vehicle logo recognition using convolutional neural network combined with multiple layer feature[J].Journal of Computer Applications,2016,36(2):444-448. [9]杜小毅,于濂.基于联合特征的车标自动识别方法[J].智能交通技术,2012(1):89-92. [10]Mao Songan,Ye Mao,Li Xue,et al.Rapid vehicle logo region detection based on information theory[J].Computers&Electrical Engineering,2013,39(3):863-872. [11]Wang Shengke,Liu Lili,Xu Xiaowei.Vehicle logo recognition based on local feature descriptor[J].Applied Mechanics&Materials,2012(263/266):2418-2421. [12]李玲,李文举.基于车徽背景纹理识别的车徽定位新方法[J].辽宁师范大学学报:自然科版,2009,32(2):171-173. [13]杨文文,杨国为,张鲁波,等.基于Laws模板滤波的车标定位算法[J].青岛大学学报:工程技术版,2012,27(3):45-50. [14]刘玉松,陈刚.基于边缘投影的快速车标定位方法[J].信息技术,2015(11):102-104. [15]Psyllos A P,Anagnostopoulos C N,Kayafas E.Vehicle logo recognition using a SIFT-based enhanced matching scheme[J].IEEE Transactions on Intelligent Transportation Systems,2010,11(2):322-328. [16]Wang Y Q,Liu Z F,Xiao F.A fast coarse-to-fine vehicle logo detection and recognition method[C]//Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics,Sanya,China,December 15-18,2007:691-696. [17]Gu Q,Yang J,Cui G,et al.Multi-scale vehicle logo recognition by directional dense SIFT flow parsing[C]//IEEE International Conference on Image Processing,2016. [18]Yang Jianchao,Yu Kai,Gong Yihong,et al.Linear spatial pyramid matching using sparse coding for image classification[C]//Proceeding of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2009:1794-1801. [19]王建.基于图像的智能交通系统中车标识别技术研究[D].南京:南京理工大学,2014. [20]Zitnick C L,Dollár P.Edge boxes:Locating object proposals from edges[C]//European Conference on Computer Version,2014:391-405. [21]Dollár P,Zitnick C L.Structured forests for fast edge detection[C]//2013 IEEE International Conference on Computer Vision,Sydney,Australia,Dec 3-5,2013:1841-1848. [22]Chang C C,Lin C J.LIBSVM:A library for support vector machines[J].ACM Transactions on Intelligent Systems and Technology,2011,27(2):1-27.3 实验结果
3.1 实验设置



3.2 实验结果及分析



4 结束语