多源DEM融合的高差拟合神经网络方法
2018-06-25沈焕锋岳林蔚李星华张良培
沈焕锋,刘 露,岳林蔚,李星华,张良培
1. 武汉大学资源与环境科学学院,湖北 武汉430079; 2. 中国地质大学(武汉)信息工程学院,湖北 武汉 430074; 3. 武汉大学遥感信息工程学院,湖北 武汉 430079; 4. 武汉大学测绘遥感信息工程国家重点实验室,湖北 武汉430079
数字高程模型(digital elevation model,DEM)是地表起伏形态的数字化表达,也是进行各类地学分析的重要基础数据,已被广泛用于水文、地质、气象及军事等各个领域[1-6]。伴随着对地观测技术的不断发展,获取DEM数据的能力日益增强,各研究领域对高质量DEM的需求也随之增长[4,7-11]。目前,由于观测手段、处理方式和地形条件等因素的影响,DEM仍然存在异常值、噪声、空洞等质量问题,直接影响数据的应用潜力[9]。多源DEM融合方法通过综合不同数据之间的互补信息,能获取更准确、全面、可靠的DEM,实现现有数据集的质量提升。
规则格网DEM因数据形式简单、处理分析便捷而成为最常用的数据形式。在全球尺度的栅格DEM产品中,ASTER GDEM(advanced spaceborne thermal emission and reflection radiometer global digital elevation model)和SRTM DEM(shuttle radar topography mission digital elevation model)的应用最为普遍[8,12]。ASTER GDEM是根据Terra卫星先进星载热发射和反辐射计的立体像对而生成的,以高分辨率(30 m)覆盖全球约99%的陆地表面。在发布的2个版本中,ASTER GDEM v2(第2版数据)的分辨率和精度相对较高。但由于光学成像易受云雾等天气的影响,数据中仍然存在大量异常值和噪声(图1(b)),使其精度饱受争议[13]。SRTM DEM是根据美国奋进号航天飞机获取的雷达影像所制作的高程产品,覆盖全球80%以上的陆地表面,因其精度在平坦地区稳定而成为最常用的DEM数据源[14-15]。然而受限于雷达侧视成像模式,SRTM DEM易在坡度较大的区域形成数据空洞。USGS根据不同处理级别发布了90 m分辨率的SRTM3和30 m分辨率的SRTM1。目前,SRTM3 v4.1是使用最广泛的DEM,在SRTM v2.1的基础上结合Reuter等的算法填充空洞所得,然而这版数据的空洞填充质量并不稳定,在山区的垂直精度差异较大[13,16]。SRTM1从2014年9月起面向全球发布,具有较高和较稳定的垂直精度,但仍有空隙和异常(图1(a))。
除了栅格DEM数据集之外,全球尺度还有丰富的矢量高程产品。例如,美国国家航空航天管理局(NASA)在2003年发射了冰、云和陆地高程卫星ICESat (ice,cloud,and land elevation satellite),搭载的地学激光测高系统GLAS(geoscience laser altimeter system)在2003—2009年获取了全球范围的高程点(图1(c)),其垂直精度在平坦地区可达厘米级[17]。
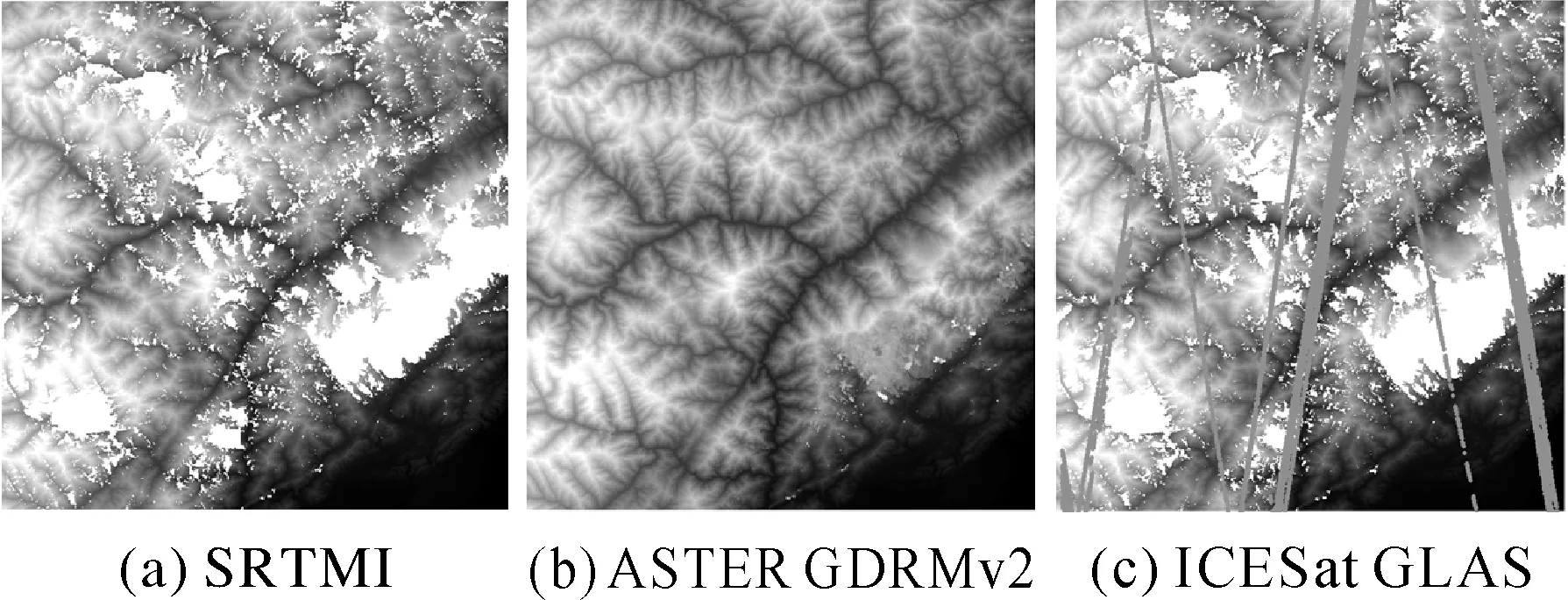
图1 全球高程数据产品样例数据Fig.1 The sample data of global elevation data products
目前,针对DEM产品的质量问题,国内外学者开展了大量融合处理工作。一方面,对于噪声和异常值,主要有以下研究:文献[18]基于插值算法,利用ICESat GLAS激光测高数据得到差值面,尝试校正ASTER GDEM数据,然而,由于ICESat GLAS数据分布稀疏,在离采样点较远的位置误差较大;文献[10]通过在频率域融合低分辨率DEM的高频成分和高分辨率DEM的低频成分实现去噪,但结果存在细节信息丢失现象。另一方面,针对DEM的空洞问题,现有研究工作主要包括:文献[12]提出TIN差分曲面,解决了空洞填充过程中不同数据间的高程偏差;文献[19]针对SRTM及辅助数据在空洞周边区域的特点选择相应的插值方法,提出多源DEM融合策略,得到了无缝DEM产品SRTM v4.1;文献[20—21]构建高精度曲面建模方法,支持融入多源数据,可处理DEM的空洞问题。此外,也有学者同时针对空洞和噪声发展融合方法:文献[8]利用数据拼接和平滑算法,通过融合多个DEM数据集生成“EarthEnv-DEM90”产品,但未充分考虑输入数据集的精度差异;文献[22]提出一种基于正则化变分的多尺度融合方法,能够同时克服噪声和空洞的影响,有效提升数据分辨率,但融合结果的分辨率和精度水平受限于输入DEM。
总的来说,现有的融合方法没有充分考虑多源数据之间在获取方式、分辨率、覆盖范围及精度上的差异,难以同时处理噪声、异常值、空洞、分辨率差异等问题[8,10,12,19]。此外,目前的融合方法也较少引入高精度矢量数据,在一定程度上限制了融合产品的质量。对于多源DEM融合而言,既要考虑形式和精度上的差异,又要综合各数据集的优势,才能得到精度更高的DEM产品。因此,结合SRTM1、ASTER GDEM v2及ICESat GLAS数据的特性,本文将在笔者前期方法的基础上[9],进一步提出基于高差拟合神经网络的多源DEM融合方法,改善模型的自适应特性,得到空间无缝DEM。
1 数据融合方法
1.1 多源DEM数据融合框架
本文以SRTM1为基础数据,利用ASTER GDEM v2填补其数据空洞。虽然ASTER GDEM v2覆盖范围较广,但有异常值和噪声。为了充分发挥ASTER GDEM v2在覆盖范围上的优势,利用ICESat GLAS校正其垂直精度。ICESat GLAS的数据沿轨道点状分布,间距大,传统插值方法误差较大。因此,本文以点面融合为基本思想,利用神经网络训练点状ICESat GLAS与面状ASTER GDEM v2的误差统计关系,实现对后者的精度校正。在校正过程中,根据DEM的空洞率(空洞高程点占所有高程点的比例)采取不同的处理策略。对于空洞率小于0.05%的SRTM1数据,缺失范围很小,直接利用基于TIN差分曲面的算法填充空洞。而对于空洞率大于0.05%的数据,则先经过精度校正,再进行空洞填补。根据试验分析,ICESat GLAS与ASTER GDEM v2的值都表示为高程,可能存在一定的线性相关性。因此,为了使网络能更好地学习数据关系,利用ICESat GLAS与ASTER GDEM v2高差进行训练,以削弱数据间的相关性。
综上所述,本文方法的整体流程分为以下3个步骤(如图2所示):①数据预处理。实现多源DEM的坐标统一,并滤除ICESat GLAS的异常值。②高差拟合神经网络点面校正。在SRTM1的空洞范围内,利用ICESat GLAS对ASTER GDEM v2进行精度校正。③TIN差分曲面无缝填充。在校正后的ASTER GDEM v2基础上,以TIN差分曲面方法填补SRTM1空洞,并对残留的异常值进行滤波,得到最终融合结果。

图2 基于高差拟合神经网络的多源DEM融合方法流程Fig.2 Flowchart of the multi-source DEM fusion method based on elevation difference fitting neural network
1.2 数据预处理
预处理阶段主要是ICESat GLAS数据坐标系转换和异常值滤除。具体为:①进行坐标转换。SRTM1和ASTER GDEM v2采用的是WGS84/EGM96坐标系,而ICESat GLAS采用TOPEX/Poseidon坐标系。为了消除不同高程系统带来的系统偏差,需要统一坐标系。由于两种坐标系在经纬度方向上的水平偏差不到1 m,只在垂直方向上进行ICESat GLAS的高程转换[23]。利用式(1)将椭球高hTOPEX转换成椭球高hWGS-84,再转换为大地水准高H。②进行异常值滤除。结合常用的参数标准筛选出ICESat GLAS后[18],再利用式(2)的坡度自适应思想设置高程阈值,滤除受遮挡物影响的异常值[24],确保对于SRTM1或ASTER GDEM v2的高程绝对误差在合理范围内。
hWGS-84=hTOPEX-0.707
H=hWGS-84-N
(1)
式中,hTOPEX、hWGS-84分别为对应于TOPEX、WGS-84的椭球高;0.707为两椭球体的垂直偏差;H为对应于EGM96模型的大地水准高;N为大地水准面差距;单位均为米。
(2)

1.3 基于高差拟合神经网络的点面校正方法
人工神经网络(artificial neural network,ANN)只需确定非常量性参数,便能自组织、自学习、自适应地挖掘数据统计特征。因其强大的拟合能力、学习能力和较强的鲁棒性,被广泛地应用于回归问题中[25-26]。本文通过ASTER GDEM v2和ICESat GLAS构建训练样本集,挖掘二者的统计关系,得到ASTER GDEM v2的高程预测值,实现其精度校正,具体流程如图3所示。将ASTER GDEM v2的经纬度坐标和地形坡度信息作为网络输入、ICESat GLAS数据点与对应ASTER GDEM v2的高程差值作为网络输出,将网络输出与ASTER GDEM v2相加,即为校正后的高程值。

图3 ASTER GDEM v2精度校正流程Fig.3 Flowchart of the accuracy correction of ASTER GDEM v2
顾及ICESat GLAS和ASTER GDEM v2的水平位移差及异常值的影响,通过邻域窗口选取样本来构建输入矩阵,经过归一化处理后,将输入向量和目标向量输入神经网络。整个模型由n个输入层神经元、s个隐含层神经元和p个输出层神经元构成,通过权值参数和激活函数连接输入向量和目标向量,实现信息传递和学习。模型中,设输入层神经元为x=(x1,x2,…,xn),用于输入数据的接收;隐含层和输出层神经元分别为h=(h1,h2,…,hs),o=(o1,o2,…,op),用于接收数据的加工和处理(式(3))。由于输入层和输出层之间存在一定的映射关系,基于梯度下降的误差逆传播算法,将输出层误差通过逐层回传来调整神经元的连接权和阈值[27],使输出值o与真实值y的误差E达到最小(式(4))。
(3)

(4)
式中,E为模型误差;n为迭代次数;η为学习速率。其中,学习率关系着连接权的更新,其值越大,往往收敛速率越快,但易造成震荡效应。
模型参数设置如下:邻域窗口为3×3;隐含层神经元个数为6;隐含层、输出层的激活函数分别为“tansig”和“purelin”函数;学习率为0.001;输入层和输出层的神经元个数根据变量数而定。
1.4 基于TIN差分曲面的无缝填充方法
在数据融合过程中,多源DEM间的垂直偏差会造成边缘出现“断裂”现象,因此,利用文献[12]提出的基于TIN差分曲面的算法来处理这种偏差。此算法的基本思想是,在空洞区域内,假设校正后的ASTER GDEM v2与SRTM1的地形起伏保持一致,由ASTER GDEM v2获取的差分曲面同样可以用于SRTM1。因此,本文在SRTM1空洞区域周边提取宽度为5个高程点的缓冲区,构建空洞区域基面,进而通过ASTER GDEM v2基面和校正后的ASTER GDEM v2得到差分曲面,应用于SRTM1,过程表示如下
SC=So+AC-Ao
(5)
式中,So、Ao分别为SRTM1、ASTER GDEM v2数据的基面;AC为空洞范围内校正后的ASTER GDEM v2的高程;SC为最终填充SRTM1的曲面。鉴于填充数据可能存在噪声和异常值,在填充前对曲面进行自适应平滑滤波,且在填充后对连接区域进行轻微羽化,实现接缝处的平滑过渡。
2 试验结果与分析
2.1 模型验证
对神经网络校正模型的空间预测能力进行验证。本文选用了交叉验证[9]和中心块验证两种方式测试模型精度。交叉验证将ASTER GDEM v2覆盖的有效ICESat GLAS分成10等份,以其中的9份作为训练数据,剩下的1份则作为测试数据,循环试验直到所有的数据都曾作为测试数据。由于ICESat GLAS数据在沿轨道方向和轨道间分布差异较大,则同时采用中心块验证的方法(如图4所示),将训练和测试数据分为空间上互不重合的部分,进一步验证模型的可靠性和稳定性。具体地,将ASTER GDEM v2中心区域的ICESat GLAS作为测试数据,其余的ICESat GLAS作为训练数据。表1—2分别给出了交叉验证和中心块验证的精度评价情况,包括原始ASTER GDEM v2、多元线性回归方法(multiple linear regression,MLR)及本文方法校正ASTER GDEM v2的结果,分别表示为ASTER、MLR、ANN。由于均方根误差(root mean square error,RMSE)对异常值敏感,能很好地反映数据精度,将其作为定量评价指标(式(6))。
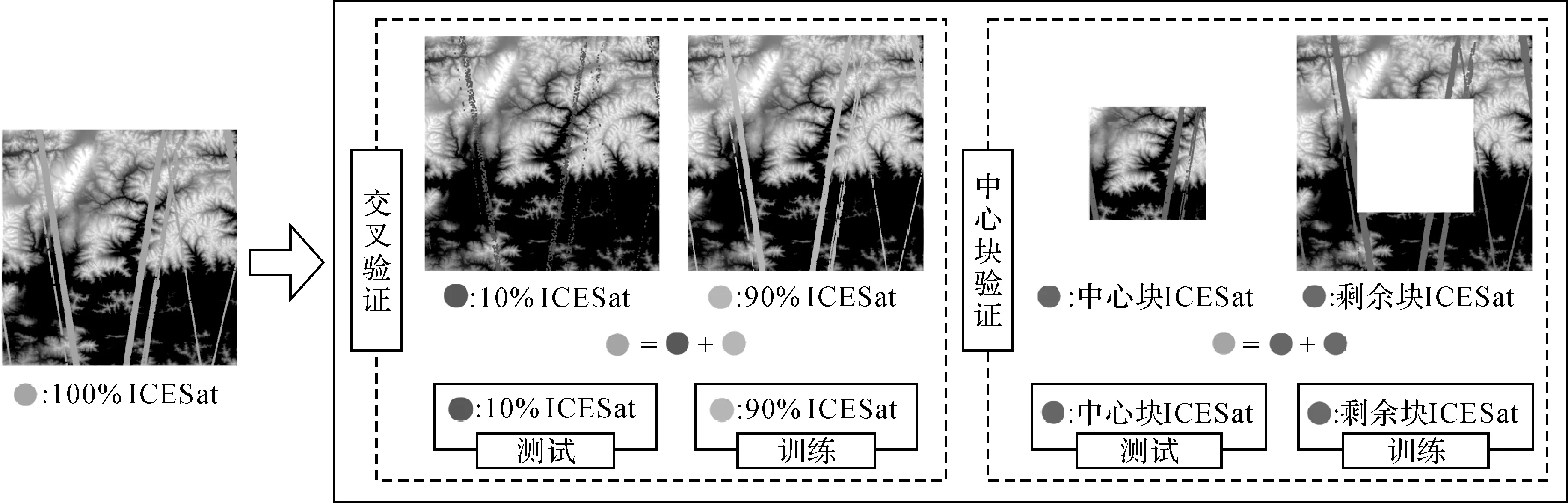
图4 验证试验流程Fig.4 Flowchart of the verification experiment

Tab.1 RMSE of cross validation for training and test in neural networks m

表2 神经网络训练和测试中心块验证的RMSE值
(6)
式中,sa、za分别为第a个参考数据ICESat GLAS及待评价数据集对应点的高程值;N为测试高程点数。
从表1、表2均可看出,在所有验证试验中,神经网络模型结果相对于原始数据和MLR结果更优,表明其能较好地构建数据之间的误差关系。表2的中心块验证,因训练数据与测试数据在空间覆盖范围差异较大,能更好地验证模型的效果,且神经网络模型结果优势更为突出,有利地验证了其空间预测能力更强。
为了进一步说明精度校正的必要性,试验选取了5幅数据,对比了不同方法和步骤对结果的影响,如表3所示。在表格中,“SRTM1_A”表示利用原始ASTER GDEM v2填充SRTM1空洞的结果,而“TIN_DSF”表示不经过精度校正,采用TIN差分曲面算法的结果,“MLR_DSF”和“ANN_DSF”分别表示由MLR模型和神经网络方法校正后,经TIN差分曲面算法填充的结果。从表3可以看出,相比于SRTM1_A、TIN_DSF,MLR_DSF和ANN_DSF的RMSE值更小,说明精度校正能有效提高数据精度。不论是空洞还是整体的定量评价,经过校正的填充数据都能取得更优的结果。而对比ANN_DSF和MLR_DSF可以发现,本文方法在定量评价上优于MLR方法,表明其具有较强的空间预测能力,能更好拟合数据之间的关系,与表1—2中点面校正模型的验证结果趋势相一致。

表3 试验数据空洞和整体的RMSE值
2.2 试验结果与分析
本文随机选取了不同空洞分布特征、不同空洞率的13幅数据进行试验,在图5中给出了试验数据的空洞率和空洞区域内ICESat GLAS数据的分布。ICESat GLAS点的分布直接关系着评价的可靠性。图6展示了SRTM3 v4.1、ASTER GDEM v2、SRTM1_A与本文方法融合结果的RMSE对比情况。其中,非空洞区域的评价反映不同DEM数据集的精度水平,空洞区域的评价体现各个方法的优劣。
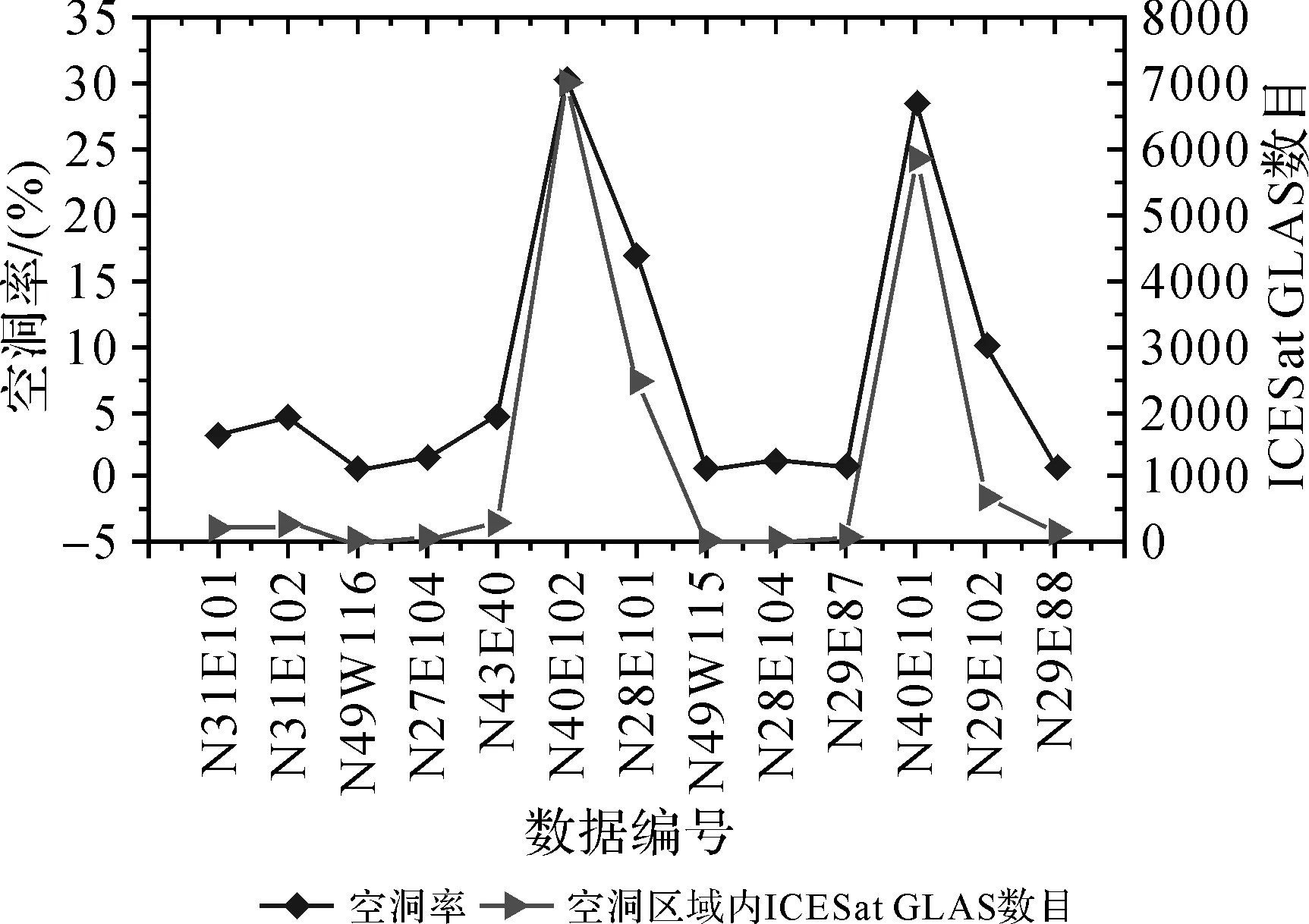
图5 试验数据空洞率和空洞区域内ICESat GLAS数据的分布Fig.5 The distribution of void rates of experiment data and ICESat GLAS in these void areas
从图5可明显看出,空洞率和空洞区域内ICESat GLAS数目的趋势相同,说明ICESat GLAS在参考数据覆盖范围内沿轨道分布较为均匀。结合图6可看出,在大多数情况下,融合结果的RMSE值都表现出明显的优势。在空洞区域内(图6(a)),多数ASTER GDEM v2的垂直精度优于SRTM3 v4.1,而不及融合结果,可见本文方法对多数空洞区域的校正有效。对于“N28E101”和“N29E102”,SRTM3 v4.1的精度表现异常,原因在于地形陡峭,该区域的填充精度不准确,也进一步验证了其填充结果精度不稳定的现象[28]。从图6(b)中可以看出,大多数数据非空洞区域的垂直精度明显优于空洞区域。而“N29E87”和“N29E88”数据空洞范围非常小,因此验证样本在空洞区域数量较少,评价结果不具有代表性。总体而言,融合结果(图6(c))的精度都优于其他DEM数据,在得到空间无缝DEM的同时,还能保证其具有稳定的垂直精度。
从视觉效果上来看,图7展示了“N28E101”不同区域的放大图,该完整数据块的覆盖范围为28°N—29°N,101°E—102°E,空洞率达16.96%。图中,空洞范围的ASTER GDEM v2地形纹理较为清晰,为融合结果奠定了基础,但受噪声和异常值的影响。相比于ASTER GDEM v2和SRTM1_A,本文方法消除了噪声和异常值,且空洞填充的边界过渡也更加平滑,尤其在深色选框内效果显著。图8展示了“N29E102”的区域彩色渲染图,该完整数据块覆盖范围为29°N—30°N,102°E—103°E,空洞率达10.04%。由图可知,该区域地形较崎岖且空洞范围大,从而影响地形的连续性。经过精度校正和填充,融合结果既能保留原始SRTM1的优势,又能有效地挖掘辅助数据的特征潜力,在目视判别上明显优于原始数据。
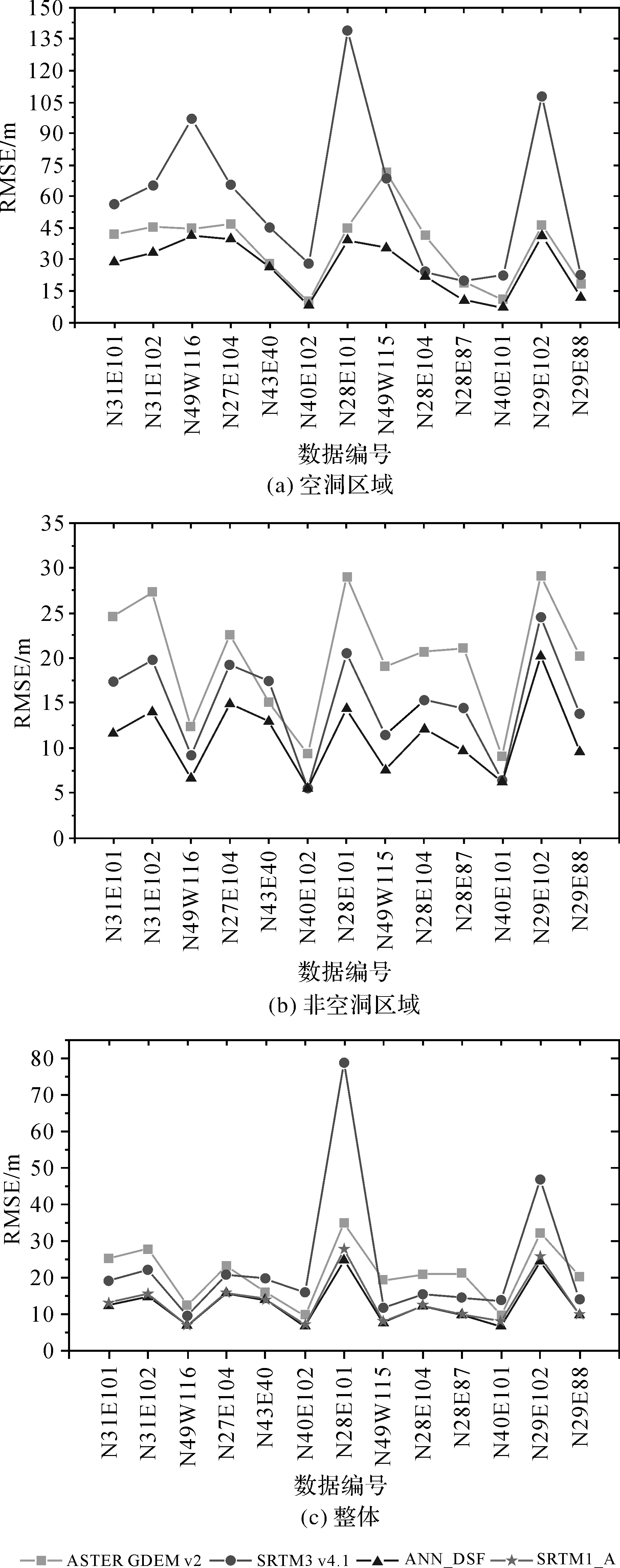
图6 试验数据的垂直精度评价结果Fig.6 The vertical accuracy evaluations of experiment data

图7 N28E101的不同区域放大图Fig.7 The larger image of different areas in N28E101
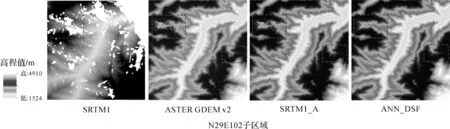
图8 N29E102的区域渲染图Fig.8 The rendered image of different data in N29E102
3 结 论
本文结合高差拟合神经网络和TIN差分曲面方法,融合多源数据对SRTM1数据中的空洞进行修复。多源数据融合的方式既能保留SRTM1的细节信息,又能有效结合ASTER GDEM v2的无缝特性和ICESat GLAS的高精度特点,生成高质量的空间无缝DEM。通过试验发现,与不同方法相比,本文方法的结果具有最小的RMSE值。从视觉效果上来看,融合结果在填充区域具有更加自然的地形纹理,在填充边界过渡也更加平滑。目前,此方法对空洞中较大范围的噪声或异常值的处理存在一定的局限性。下一步可对辅助数据进行扩充,融入更多的高精度测高数据,如Cryosat2及即将发射的ICESat2数据,对方法进行改善,并考虑利用无参考修复的方法对残留异常值进行进一步处理。
参考文献:
[1] JAFARZADEGAN K,MERWADE V.A DEM-based Approach for Large-scale Floodplain Mapping in Ungauged Watersheds[J].Journal of Hydrology,2017,550:650-662.
[2] HANCOCK G R,MARTINEZ C,EVANS K G,et al.A Comparison of SRTM and High-resolution Digital Elevation Models and Their Use in Catchment Geomorphology and Hydrology:Australian Examples[J].Earth Surface Processes and Landforms,2006,31(11):1394-1412.
[3] BU Xiaoqian,YUE Peng.A Scientific Workflow Approach for Hydrologic Analysis from Digital Elevation Model[C]∥Proceedings of the 5th International Conference on Agro-Geoinformatics.Tianjin,China:IEEE Press,2016:17-21.
[4] KHROMOVA T E,DYURGEROV M B,BARRY R G.Late-twentieth Century Changes in Glacier Extent in the Ak-shirak Range,Central Asia,Determined from Historical Data and ASTER Imagery[J].Geophysical Research Letters,2003,30(16):1863.
[5] 徐彦怀.基于卫星遥感影像和DEM融合的地质断裂带研究[J].测绘与空间地理信息,2016,39(11):135-138.
XU Yanhuai.The Study on Geological Fault Zone Base on the Merged Image between the Satellite Remote Sensing Image and DEM[J].Geomatics & Spatial Information Technology,2016,39(11):135-138.
[6] TOUTIN T.ASTER DEMs for Geomatic and Geoscientific Applications:A Review[J].International Journal of Remote Sensing,2008,29(7):1855-1875.
[7] 王祎婷,陈秀万,柏延臣,等.多源DEM和多时相遥感影像监测冰川体积变化——以青藏高原那木纳尼峰地区为例[J].冰川冻土,2010,32(1):126-132.
WANG Yiting,CHEN Xiuwan,BO Yanchen,et al.Monitoring Glacier Volume Change Based on Multi-temporal Remote Sensing Images[J].Journal of Glaciology and Geocryology,2010,32(1):126-132.
[8] ROBINSON N,REGETZ J,GURALNICK R P.Earth Env-DEM90:A Nearly-global,Void-free,Multi-scale Smoothed,90 m Digital Elevation Model from Fused ASTER and SRTM Data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,87:57-67.
[9] YUE Linwei,SHEN Huafeng,ZHANG Liangpei,et al.High-quality Seamless DEM Generation Blending SRTM-1,ASTER GDEM v2 and ICESat/GLAS Observations[J].ISPRS Journal of Photogrammetry and Remote Sensing,2017,123:20-34.
[10] KARKEE M,STEWARD B L,AZIZ S A.Improving Quality of Public Domain Digital Elevation Models through Data Fusion[J].Biosystems Engineering,2008,101(3):293-305.
[11] LI Xinghua,SHEN Hhuanfeng,FENG Ruitao,et al.DEM Generation from Contours and A Low-resolution DEM[J].ISPRS Journal of Photogrammetry and Remote Sensing,2017,134:135-147.
[12] LUEDELING E,SIEBERT S,BUERKERT A.Filling the Voids in the SRTM Elevation Model:A TIN-based Delta Surface Approach[J].ISPRS Journal of Photogrammetry and Remote Sensing,2007,62(4):283-294.
[13] LI Peng,SHI Chuang,LI Zhenhong,et al.Evaluation of ASTER GDEM Using GPS Benchmarks and SRTM in China[J].International Journal of Remote Sensing,2013,34(5):1744-1771.
[14] FARR T G,ROM P A,EDWARD C,et al.The Shuttle Radar Topography Mission[J].Reviews of Geophysics,2007,45(2):1-33.
[15] YANG Liping,MENG Xingmin,ZHANG Xiaoqiang.SRTM DEM and Its Application Advances[J].International Journal of Remote Sensing,2011,32(14):3875-3896.
[16] YUE Linwei,YU Wei,SHEN Huanfeng,et al.Accuracy Assessment of SRTM V4.1 and ASTER GDEM V2 in High-Altitude Mountainous Areas:A Case Study in Yulong Snow Mountain,China[C]∥Proceedings of 2015 IEEE International Symposium on Geoscience and Remote Sensing.Milan,Italy:IEEE Press,2015,5011-5014.
[17] WANG Xianwei,GONG Peng,ZHAO Yuanyuan,et al.Water-level Changes in China’s Large Lakes Determined from ICESat/GLAS Data[J].Remote Sensing of Environment,2013,132:131-144.
[18] AREFI H,REINARTZ P.Accuracy Enhancement of ASTER Global Digital Elevation Models Using ICESat Data[J].Remote Sensing,2011,3(7):1323-1343.
[19] REUTER H I,NELSON A,JARVIS A.An Evaluation of Void-filling Interpolation Methods for SRTM Data[J].International Journal of Geographical Information Science,2007,21(9):983-1008.
[20] YUE Tianxiang,CHEN Chuanfa,LI Bailian.A High-accuracy Method for Filling Voids and Its Verification[J].International Journal of Remote Sensing,2012,33(9):2815-2830.
[21] 陈传法,杜正平,岳天祥.基于高精度曲面建模方法的SRTM空缺插值填补研究[J].大地测量与地球动力学,2010,30(1):126-129,135.
CHEN Chuanfa,DU Zhengping,YUE Tianxiang.Research of SRTM Void-filling Based on High Accuracy Surface Modelling[J].Journal of Geodesy and Geodynamics,2010,30(1):126-129,135.
[22] YUE Linwei,SHEN Huanfeng,YUAN Qiangqiang,et al.Fusion of Multi-scale DEMs Using A Regularized Super-resolution Method[J].International Journal of Geographical Information Science,2015,29(12):2095-2120.
[23] BAGHDAD N,LEMARQUAND N,ABDALLAH H,et al.The Relevance of GLAS/ICESat Elevation Data for the Monitoring of River Networks[J].Remote Sensing,2011,3(4):708-720.
[24] 周秀芝,文贡坚,王润生.自适应窗口快速立体匹配[J].计算机学报,2006,29(3):473-479
ZHOU Xiuzhi,WEN Gongjian,WANG Runsheng.Fast Stereo Matching Using Adaptive Window[J].Chinese Journal of Computers,2006,29(3):473-479.
[25] 李双成,郑度.人工神经网络模型在地学研究中的应用进展[J].地球科学进展,2003,18(1):68-76.
LI Shuangcheng,ZHENG Du.Applications of Artificial Neural Networks to Geosciences:Review and Prospect[J].Advance in Earth Sciences,2003,18(1):68-76.
[26] ÖZTOPAL A.Artificial Neural Network Approach to Spatial Estimation of Wind Velocity Data[J].Energy Conversion and Management,2006,47(4):395-406.
[27] ZHANG Liangpei,WU Ke,ZHONG Yanfei,et al.A New Sub-pixel Mapping Algorithm Based on A BP Neural Network with an Observation Model[J].Neurocomputing,2008,71(10-12):2046-2054.
[28] 张朝忙,刘庆生,刘高焕,等.SRTM 3与ASTER GDEM数据处理及应用进展[J].地理与地理信息科学,2012,28(5):29-34.
ZHANG Chaomang,LIU Qingshneg,LIU Gaohuan,et al.Data Processing and Application Progress of SRTM 3 and ASTER GDEM[J].Geography and Geo-Information Science,2012,28(5):29-34.