基于激光扫描外测法的球罐容量计量方法研究
2018-06-25陈贤雷郝华东施浩磊李曙光
陈贤雷, 郝华东, 施浩磊, 李曙光
(舟山市质量技术监督检测研究院, 浙江 舟山 316021)
1 引 言
球形金属罐(简称“球罐”)是一种密闭压力容器[1],广泛应用于石油、化工、冶金等部门,可用作液化石油气、液化天然气和压缩气体及其他介质的储存容器,在能源计量中起着重要的作用。球形金属罐在液体化工产品的贮存和贸易结算等各个环节都需要准确的计量数据,其容量计量的准确性直接影响企业的经济效益。
依照《JJG 642—2007 球形金属罐容量》检定规程的要求[2],球罐容量测量通常采用几何测量法,赤道直径和竖向直径作为其中的主要项目,主要包括经纬仪测量法、手持激光测距仪测量法、围尺测量法和全站仪测量法等[2],也有学者对球罐压力、不确定度评定及测量应注意问题等进行了研究[3~6]。由于建造后的球罐是个非完整球面,通过上述方法均无法全面获得球罐准确信息,而且自动化程度低、费时费力。三维激光扫描技术突破了这一限制,能够全面获取球罐空间不规则三维模型,同时排除围尺法需要搭脚手架、高空作业等引入的安全隐患,研究基于激光扫描的球罐容量计量方法研究势在必行。本文采用激光扫描外测方式探讨球罐容量计量方法,建立球罐三维几何模型,通过数据处理计算出球罐容量,并结合具体试验进行了分析和比对。
2 基本原理
2.1 外测方案
根据球罐的标称容量和罐体外部实际情况,外部测量一般分4~5站进行。在进行球罐外部测量时,首先要进行实地考察,以便对罐体周围环境有整体了解,明确附件的位置;进行整体规划,根据站点和标靶的布设要求,选取合适的站点和标靶布置点,确保不同站点之间有部分重合区域,以保证数据获取的完整性;绘制罐体外部周围区域的环境情况草图,明确扫描站点和标靶设置点的位置,标记附件的大致位置,记录罐体基本信息,完成扫描计划制定。
2.2 点云数据自动拼接
2.2.1 标靶选择
针对球罐现场实际情况,考虑到点云数据获取速度快、数据量大、测量距离远、点云定向数据处理相对滞后的现状,运用基于远距离标靶识别的点云自动定向方法[7]。主要根据远距离标靶表面点稀少、误差较大的特点,以远距离标靶自动识别为主要研究目标,结合标准控制点在指定坐标中的信息,使标靶扫描坐标与指定坐标系坐标一一对应,自动解算点云定向参数,进行坐标转换。这里选用的标靶为球形标靶(如图1所示),球面材料为陶瓷材料,直径为22 cm。

图1 球形标靶
2.2.2 基于球形标靶的多站点云数据自动拼接
对于球罐外测法而言,通常需进行多站扫描,各站点数据均为独立坐标系,需将所有的点云数据整合到一个统一的坐标系中,获得一个完整的数据集。如图2所示为激光扫描系统在A、B两站点拼接原理图,图中1、2、3、4、5分别为5个球形标靶,2、3、4号球形标靶所在的区域为A和B两站的公共扫描区域。可以设A站的坐标系为O1x1y1z1,B站的坐标系为O2x2y2z2。通过这3个球形标靶将A、B两站点不同坐标系下得到的数据转换到同一个坐标系下,以实现多站点云数据的拼接。

图2 拼接原理图
设2号球形标靶在A、B两站扫描的点分别为P1(x1,y1,z1)和Q1(X1,Y1,Z1),将A、B两站的点进行拼接,通过式(1)将扫描的点进行(R,S)变换,即:
(1)
式中:R为旋转矩阵,同时R为一个正交矩阵;S为平移矩阵。其满足以下性质RT=R-1,|R|=±1。
同理,3,4号球形标靶重复上述坐标转换过程。
本文采用ICP算法进行拼接。该算法要求将各个点上进行的三维数据点集必须有重叠,在拼合中至少要有4对或者4对以上不在同一直线上的最近点。即通过球形标靶2、3、4号球形标靶来实现拼接。
2.3 点云数据噪声点剔除与体积计算
在对球罐罐体表面三维点云数据获取过程中,由于受到激光扫描系统的测量精度、测量速度、操作者经验和被测表面质量等因素的影响,将会产生误差数据点,为了保证计算准确度,需要对点云数据进行噪声点剔除与筛减。首先采用观察法直接删除比较明显的粗差点,如球罐支柱、支架、接管、横梯等附件,然后运用领域平滑滤波方法进行噪声点剔除,通过一点和邻域点坐标求平均以去除随机噪声,其优点是算法简单、计算速度快[8]。
在计算半径之前,通常需要先通过拉依达准则进行粗差剔除。再采用最小二乘法对不同垂直高度的球罐水平截面数据进行半径拟合计算。通过以上步骤得到球罐三维几何模型,构建一系列平行于xOy平面的水平面,采用积分方法计算出球罐的体积[9]。
3 试验分析
以某公司一标称容量为200 m3的4#球罐作为研究对象进行试验,共扫描4站,扫描测站位置分布图(如图3所示)中球形标靶的摆放位置,图3(a)为1~4号标靶,图3(b)为2~6号标靶,图3(c)为4~8号标靶,图3(d)为6~8号标靶。相邻两站点之间至少能够有3个相同标靶,确保拼接精度在2 mm之内。
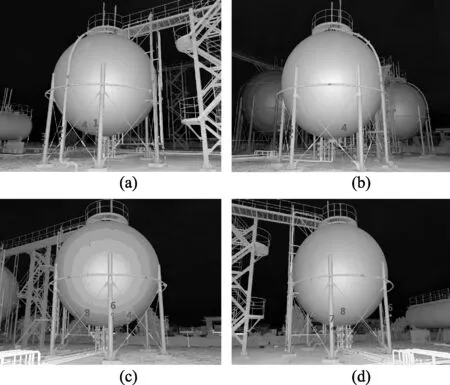
图3 球罐4测站位置分布图
经过拼接、噪声剔除、约减后的球罐效果图如图4所示,剔除附件数据后的球罐三维点云模型如图5所示。
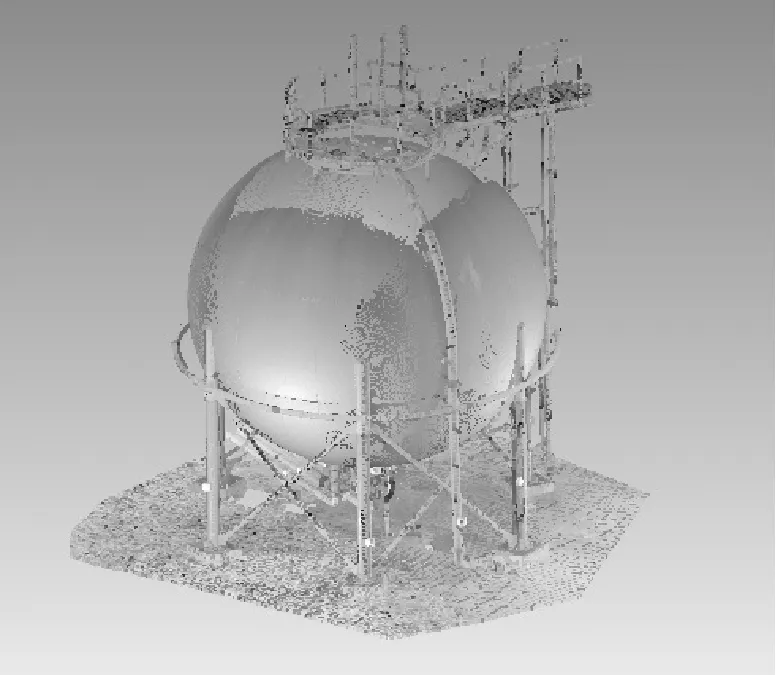
图4 球罐效果图

图5 球罐点云模型
4 结 论
本文运用激光扫描外测法对球罐容量计量方法进行了初步研究,并设计了比对试验,以传统全站仪方法结果作为参考值,容积相对误差为0.304% ,满足JJG 642—2007《球形金属罐容量》计量检定规程的要求。此外,在球罐罐区密集、罐高度大于12 m的情况下,采用外测法测量,因罐区密集化会导致设站困难,甚至无法实现罐顶部位置测量,换站时部分球形标靶位置极难扫描到,关于测站如何设置、球形标靶如何摆放等问题还需要做进一步的研究。
[参考文献]
[1] 刘子勇. 容量计量技术[M]. 北京:中国计量出版社, 2009.
[2] 国家质量检验检疫总局. JJG 642—2007球形金属罐容量[S]. 2009.
[3] 柯瑞刚, 廉育英, 张一立. 压力对金属球罐容积的影响[J]. 计量技术,1985, (1): 21-23.
[4] 刘子勇, 佟林, 吴亚南. 球形金属罐容量测量不确定度评定[J]. 中国计量,2007, (12): 72-73.
[5] 吴斌,丁文,杨峰亭,等. 非正交轴系全站仪坐标测量系统误差分析技术研究[J]. 计量学报, 2017,38(6):661-666.
[6] 侯松梁, 于陆军, 王科. 球形金属罐容量表中压力增大值处理方式的建议[J]. 中国计量, 2015,(7): 68-69.
[7] 姚吉利, 马宁, 贾象阳, 等. 球形标靶的固定式扫描大点云自动定向方法[J]. 测绘学报, 2015, 44(4):431-437.
[8] 王金涛, 刘子勇, 张珑, 等. 基于点云分析的大型立式液态石化产品储罐容量计量方法研究[J]. 计量学报, 2011, 32(2):110-113.
[9] 魏凯, 宋述古, 刘子勇. 基于三维激光扫描原理的球形罐容量计量方法研究[J]. 计量学报, 2015, 36(6): 607-609.
[10] 国家质量检验检疫总局. JJF 1033—2016计量标准考核规范[S]. 2016.
