基于真实交通状况的固定式机动车现场测速标准装置
2018-06-25王肖磊叶振洲
杜 磊, 孙 桥, 林 峰, 白 杰, 王肖磊, 叶振洲
(1. 中国计量科学研究院, 北京 100029; 2.浙江省计量科学研究院, 浙江 杭州 310018)
1 引 言
机动车测速仪是交管部门治理超速违章现象的主要执法器具,根据工作原理的不同,目前我国在用的机动车测速仪包括机动车雷达测速仪[1, 2]、机动车激光测速仪[3]和机动车地感线圈测速系统[4]等3大类。现有机动车测速仪检测方案一般采用模拟检测与现场检测相结合[1~4],其中,模拟检测方法是在实验室中通过不同工作原理的机动车测速仪模拟检定装置来模拟机动车行驶速度值,以对相应工作原理的机动车测速仪在理想状态下的测速范围、模拟测速误差和特性指标等计量性能进行检测;而现场检测方法(以下简称传统方法)是通过封闭道路,依靠安装了车载现场标准测速仪[5]的试验车在特定行驶速度点与待检机动车测速仪进行现场道路测速比对试验,以对待检机动车测速仪的现场测速误差等计量性能进行检测。
对于周期性检定而言,传统方法仅适用于车流量较小、封路易于实现的道路情况,而随着近几年来道路上的车流量迅速增大,封路难以实现。对于型式评价而言,传统方法实质上还是在人为构建的理想交通环境下进行的,并没有考虑在真实交通环境中的不同车型、左右旁车道车辆干扰等多种影响因素。借鉴国际法制计量组织(OIML)国际建议R91中所推荐的大样本现场试验方法[6],定角式雷达测速仪型式评价大纲[7]提出了在真实交通流量状态下的型式评价现场检测新方法(以下简称新方法),并在新修订的机动车雷达测速仪检定规程[1, 2]中将其推广到周期性现场检定之中。新方法以真实交通状况下正常行驶的社会车辆作为测量目标,在同一时间和同一位置处,针对同一测量目标,将待检机动车测速仪所得到的速度测量值与现场测速标准装置所测得的标准速度值进行对比,计算出待检机动车测速仪的现场测速误差。
中国计量科学研究院与浙江省计量科学研究院合作在浙江省杭浦高速公路海宁段上研制并建立了基于真实交通流量状态下的固定式机动车现场测速标准装置(以下简称现场标准装置)。本文介绍了该套现场标准装置的设计思路与设计方案、现场标准装置中所用的现场标准测速仪的工作原理与测量不确定度评估,并通过2款单目标机动车雷达测速仪样品的大样本现场试验数据,验证了新方法的可行性以及该套现场标准装置的实际测速性能。
2 现场标准装置的设计思路与方案
2.1 设计思路
新方法中要求有三“同”:同一时间、同一位置和同一测量目标,现场标准装置的设计需要考虑满足上述三“同”的要求。
同一时间要求在试验时现场标准装置与待检机动车测速仪两者之间的系统时间应保持同步。这要求现场标准装置的设计中应考虑配备时间同步服务器,在检测试验开始之前,可通过时间同步服务器将两者之间的系统时间进行同步。
同一位置要求在试验时现场标准装置与待检机动车测速仪应同时测量目标车辆通过同一位置时的行驶速度值。这要求现场标准装置的速度测量区域(以下简称标准测速区域)应覆盖待检机动车测速仪的速度测量区域(以下简称待检测速区域),并增加测量目标车辆在标准测速区域内速度变化量的功能。在检测试验中选择匀速通过标准测速区域的社会车辆作为测量目标车辆,以保证目标车辆速度值在标准测速区域内均匀分布,并将其通过标准测速区域时的平均速度作为标准速度值。
同一测量目标要求在试验时现场标准装置与待检机动车测速仪应对同一辆目标车辆的行驶速度值进行测量。这要求现场标准装置在设计中应配备高清拍照取证相机,对测量的每个目标车辆进行拍照取证和号牌识别,与待检机动车测速仪的取证照片以及号牌进行核对。
2.2 设计方案
现场标准装置设计安装在浙江省杭浦高速海宁段的由西向东单向公路上,该段高速公路的限速值为120 km/h,包含3条单向行车道和1条应急车道,其中,行车道的宽度为3.75 m,应急车道的宽度为3.00 m。现场标准装置的总体设计方案如图1所示,主要由6部分组成。实物图如图2所示。
第1部分为5套相同的基于压电薄膜传感器的现场标准测速仪(以下简称现场标准测速仪),分别如图1中的1~5所示。其中,编号为1,2和3的3套现场标准测速仪分别安装在慢车道、行车道和快车道内,其标准测速区域之间平行且到龙门架10的水平距离相等,为安装在龙门架10上的顶装机动车测速仪,以及工作在等距离触发模式的多目标机动车测速仪,在进行现场试验时同时提供3条车道上的机动车行驶标准速度值;编号为1,4和5的3套现场标准测速仪分别安装在慢车道、行车道和快车道内,其标准测速区域之间成22.5°的固定夹角,为放置在路侧试验区12上的侧装机动车测速仪以及工作在等角度触发模式的多目标机动车测速仪在进行现场试验时同时提供3条车道上的机动车行驶标准速度值。
第2部分为3套相同的安装在龙门架10上的顶装高清拍照与录像取证相机(以下简称相机),如图1中的6所示。其中,相机6.a与安装在慢车道内的现场标准测速仪1配套工作;相机6.b与安装在行车道内的现场标准测速仪2和4配套工作;相机6.c与安装在快车道内的现场标准测速仪3和5配套工作。当目标车辆触发现场标准测速仪工作时,配套的相机会对所测量的目标车辆进行拍照取证和号牌识别,并对本次测量过程进行短暂录像。
第3部分为3组已预埋好的地感线圈传感器,分别如图1中的7~9所示,主要为了避免在对机动车地感线圈测速系统进行现场试验时需要多次破坏路面来埋设地感线圈传感器。
第4部分为高度6 m的龙门架,如图1中的10所示,主要用于安装高清拍照与录像取证相机以及待检的顶装机动车测速仪样品。
第5部分为控制机柜,如图1中的11,用于存放现场标准装置的数据存储器与时间同步服务器、现场标准测速仪的信号处理器、机动车地感线圈测速系统的车辆检测器以及网络和供电等配套设施。
第6部分为路侧试验区,如图1中的12所示,主要用于放置待检的侧装机动车雷达测速仪样品。
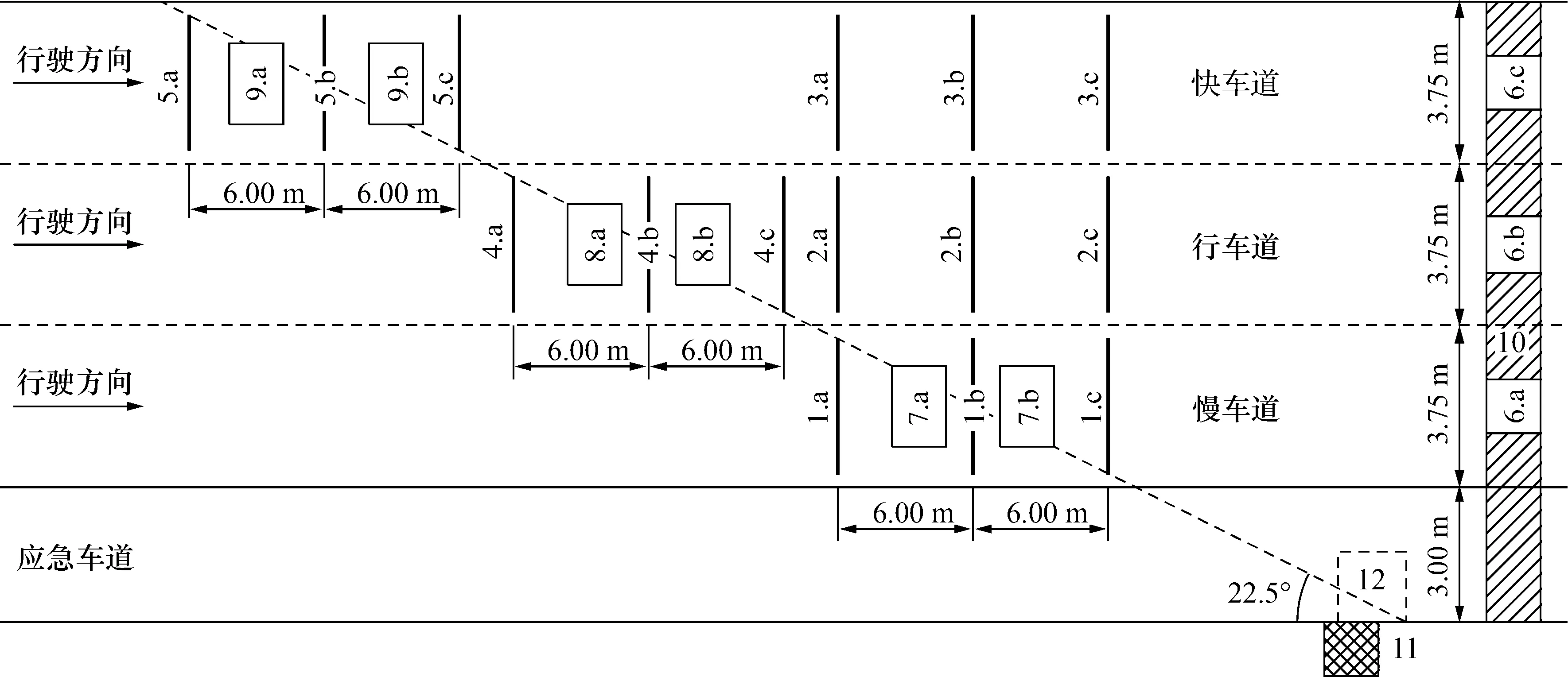
图1 现场标准装置总体设计方案示意图
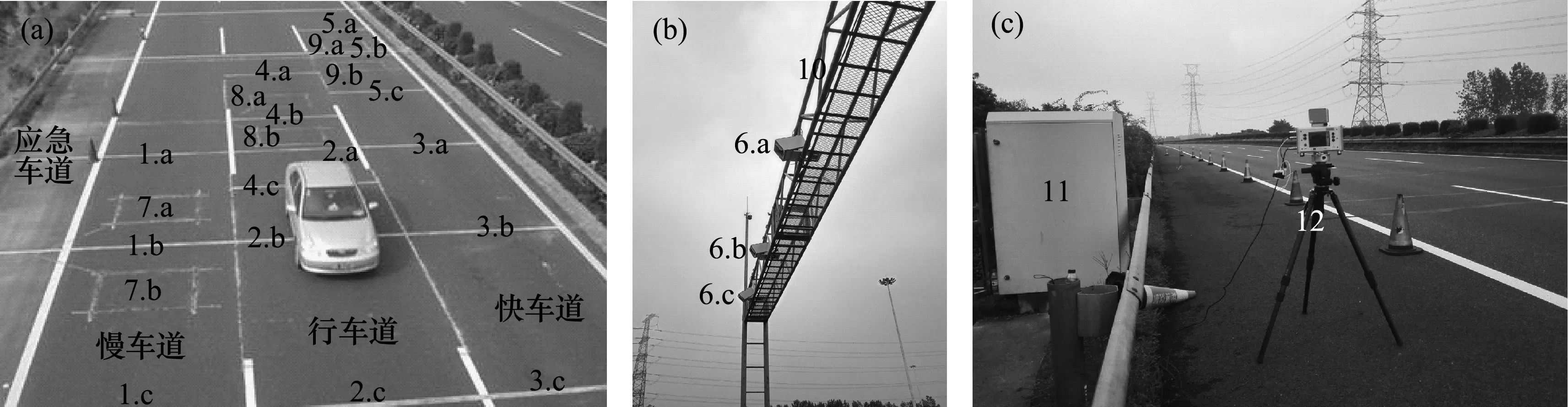
图2 现场标准装置实物图
3 现场标准测速仪的工作原理与不确定度评估
现场标准装置中共有5套现场标准测速仪,其工作原理与设计参数相同。以安装在行车道内的现场标准测速仪4(图1中的4.a,4.b和4.c)为例,来介绍现场标准测速仪的工作原理与不确定度评估。
3.1 工作原理
为了满足新方法在真实交通流量状态下的大样本、分车道、高准确度以及高效实时等现场测量要求,现场标准测速仪采用定距测时的速度测量方法,即通过测量目标车辆通过固定距离的时间间隔来进行测速,其关键是获取响应时间短、脉宽窄且无杂波干扰的精确触发信号。与激光、感应线圈等其它测速传感器相比,压电薄膜传感器具有轻薄柔软、灵敏度高、响应时间短、触发信号强且波形单一、信噪比高、寿命长和无源工作等优点,并且可根据实际道路参数情况来定制压电薄膜传感器的尺寸,因此现场标准测速仪中采用压电薄膜传感器作为测速传感器。
为了满足同一位置的测量要求,现场标准装置应具有测量目标车辆在标准测速区域内速度变化量的功能,因此现场标准测速仪4中共使用3根相同尺寸和参数、平行等距分布的压电薄膜传感器4.a,4.b和4.c,相邻两根压电薄膜传感器的间距为6 m,如图1所示。根据所安装道路的实际参数情况,压电薄膜传感器尺寸(长×宽×厚)为3.5 m×6.6 mm×1.6 mm,需要安装在路面下方,切槽尺寸(长×宽×深)为3.75 m×20 mm×40 mm,如图3(a)所示。将压电薄膜传感器用支架固定后,放置到切槽内,如图3(b)所示。使用专门传感器密封胶将切槽进行灌封,待硬化后再进行打磨,使其与路面齐平,如图3(c)所示。将压电薄膜传感器4.a和4.c之间的12 m×3.5 m(长×宽)区域作为现场标准测速仪4的标准测速区域。

图3 压电薄膜传感器实物图
现场标准测速仪的工作原理如图4所示。当目标车辆通过标准测速区域时,其轮胎依次碾压压电薄膜传感器4.a、4.b和4.c,从而顺序产生了触发脉冲信号,信号幅度U与目标车辆的轴重成正比,信号宽度等于轮胎停留在压电薄膜传感器上的时间。将顺序产生的3路触发脉冲信号通过整形和放大后传输到现场标准测速仪的信号处理器之中,通过记录4.a、4.b和4.c对应同一组车轮的触发时间ta、tb和tc,来计算目标车辆通过压电薄膜传感器4.a与4.b以及4.b与4.c的时间差,从而测量出目标车辆通过4.a与4.b的平均速度vab和通过4.b与4.c的平均速度vbc。两次速度测量结果vab和vbc之间是相互独立的,如果2次独立速度测量值的偏差在预先设置的最大允差范围之内,则认为本次测量结果是有效的,并将目标车辆通过4.a和4.c的平均行驶速度测量值vac作为标准速度值。同时,当目标车辆的前轮经过压电薄膜传感器4.c时,信号处理器会给相机6.b发送触发信号,使其对所测量的目标车辆进行拍照取证和号牌识别。
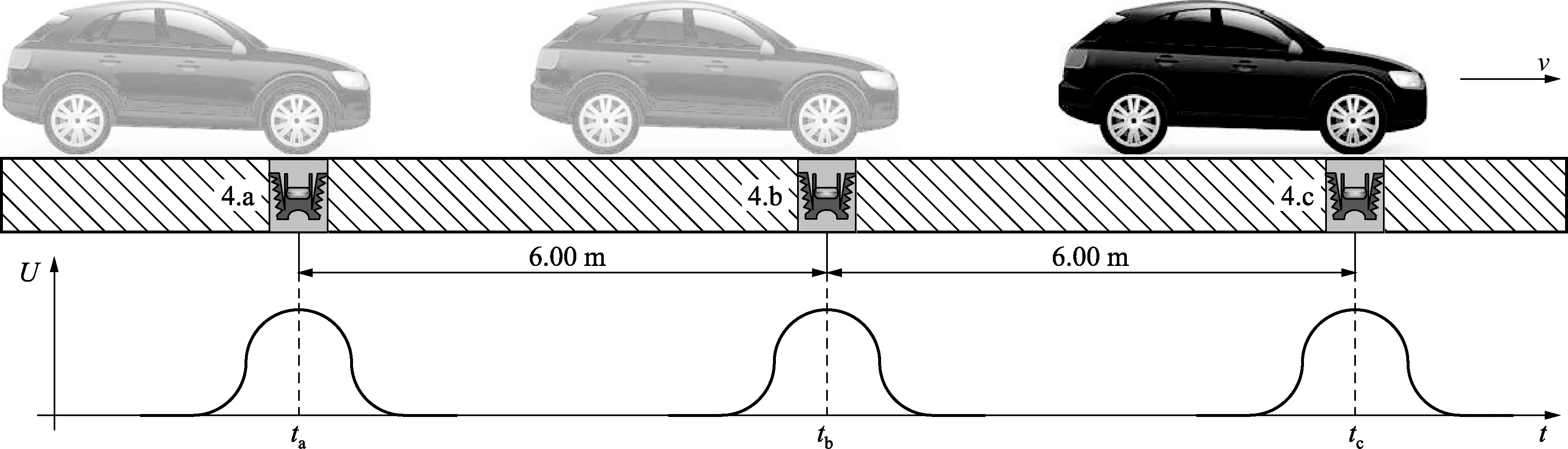
图4 现场标准测速仪工作原理示意图
3.2 不确定度评估
根据现场标准测速仪的速度测量原理,标准速度值v可以表示为
v=Kl/τ
(1)
式中:v为目标车辆的标准速度值,km/h;K为单位换算系数,等于3.6;l为压电薄膜传感器4.a与4.c之间的距离,m;τ为目标车辆通过标准测速区域的时间间隔,s。由于l和τ之间相互独立,标准速度值v的相对标准不确定度urel(v)[8]可以表示为
(2)
式中:urel(v)=u(v)/v,u(v)为标准速度值v的标准不确定度;urel(l)=u(l)/l,u(l)和urel(l)分别为与距离l测量相关的不确定度分量和相对不确定度分量;urel(τ)=u(τ)/τ,u(τ)和urel(τ)分别为与时间间隔τ测量相关的不确定度分量和相对不确定度分量。
由式(2)的不确定度数学模型可知,现场标准测速仪速度测量结果的不确定度分量包含两部分:与距离l和时间间隔τ测量相关的相对不确定度分量urel(l)和urel(τ),下面分别对其进行分析。
3.2.1 与距离测量相关的相对不确定度分量urel(l)
距离部分考虑了3个不确定度分量,分别为由测量重复性引入的不确定度分量u1(l)、由钢卷尺刻度误差引入的不确定度分量u2(l)和由压电薄膜传感器宽度引入的不确定度分量u3(l)。
1) 测量重复性引入的不确定度分量u1(l)
选择在压电薄膜传感器4.a和4.c之间5个不同位置处测量距离,测量结果分别为x1=12.002 m,x2=11.999 m,x3=12.002 m,x4=12.000 m,x5=12.001 m,则5次测量结果的平均值为
平均值的实验标准差为
因此,由测量重复性引入的不确定度分量为
2) 钢卷尺刻度误差引入的不确定度分量u2(l)
采用II级钢卷尺进行距离测量,钢卷尺的最大允许误差为±(0.3+0.2l) mm,压电薄膜传感器4.a和4.c之间的距离l=12 m,故本次测量钢卷尺的最大允许误差为±2.7 mm,以矩形分布估计,因此由钢卷尺刻度误差引入的不确定度分量为
3) 压电薄膜传感器宽度引入的不确定度分量u3(l)
由于轮胎碾压在压电薄膜传感器宽度内任一位置处均可能产生触发信号,使得压电薄膜传感器4.a与4.c之间的实际距离存在着由压电薄膜传感器宽度引入的不确定度分量,主要由压电薄膜传感器宽度引入的最大允许误差决定。压电薄膜传感器的宽度为6.6 mm,故最大允许误差为±6.6 mm,并以矩形分布估计,因此由压电薄膜传感器宽度引入的不确定度分量为
由于距离部分的3个不确定度分量之间不存在相关性,因此与距离测量相关的不确定度分量为
相对不确定度分量为
3.2.2 与时间间隔测量相关的相对不确定度分量urel(τ)
时间间隔部分考虑了2个不确定度分量,分别为由信号处理器内晶体振荡器频率准确度引入的相对不确定度分量u1rel(τ)和信号处理器时间间隔测量分辨力引入的相对不确定度分量u2rel(τ)。
1) 晶体振荡器频率准确度引入的相对不确定度分量u1rel(τ)
信号处理器的晶体振荡器频率准确度为1×10-6,以矩形分布估计,故相对不确定度分量为
2) 时间间隔测量分辨力引入的相对不确定度分量u2rel(τ)
现场标准测速仪所使用的信号处理器的时间间隔测量分辨力δτ=0.1 ms,则因此导致的标准不确定度分量u2(τ)=0.29δτ=0.029 ms。
由于现场标准测速仪速度测量范围为20~250 km/h,因此通过标准测速区域的时间间隔测量范围为172.8~2 160 ms,故时间间隔测量分辨力引入的相对不确定度分量为


因此,在20~250 km/h速度测量范围内,现场标准测速仪的相对扩展不确定度为
Urel(v)=k·urel(v)=0.12% (k=3)
由于现场标准装置中所用的其余4套现场标准测速仪的技术参数与现场标准测速仪4相同,其不确定度评估方法与结果同上,因此整套现场标准装置速度测量的相对扩展不确定度Urel(v)=0.12%(k=3),能够满足OIML R91中对现场测速标准装置的技术指标要求[6]。
4 现场试验验证与数据分析
为了验证现场标准装置在真实交通流量状态下的现场测速性能,选择2款有代表性的单目标机动车雷达测速仪样品,分别为侧装移动式机动车雷达测速仪[9]和顶装固定式机动车雷达测速仪[10],按照JJF 1335-2012[7]规定的真实交通流量状况的现场试验方法,开展大样本、多速度点的现场验证试验。
4.1 侧装移动式机动车雷达测速仪现场试验
侧装移动式机动车雷达测速仪样品安装在三脚架上,放置在图1中12所示的路侧试验区内,选择压电薄膜传感器4.a和4.c之间的区域作为本次现场试验的标准测速区域,由现场标准装置中的现场标准测速仪4提供测量目标车辆的标准速度值,由现场标准测速仪1和5提供左右旁车道上干扰车辆的行驶速度值,并由相机6.b对每次测量结果进行拍照取证和号牌识别。
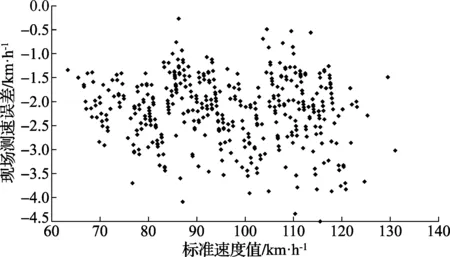
图5 侧装移动式机动车雷达测速仪现场试验结果
图5为该款侧装移动式机动车雷达测速仪样品的500组现场测速试验结果,现场标准测速仪的两次独立速度测量值的最大允许偏差设置为±1%,即只选取2次速度测量结果vab和vbc之间的偏差在±1%范围之内的测量结果作为有效测量数据。在本次试验结果中,最低速度值为63.34 km/h,最高速度值为131.02 km/h,速度测量数据主要分布在70~120 km/h的速度区间内。500组测量数据的现场测速误差分布在-4.5~0 km/h的范围内,其中现场测速误差的最大值为-0.27 km/h,最小值为 -4.50 km/h, 平均值为-2.17 km/h。
4.2 顶装固定式机动车雷达测速仪现场试验
顶装固定式机动车雷达测速仪样品固定安装在图1中所示的龙门架10上,位于中间行车道的正上方,选择压电薄膜传感器2.a和2.c之间的区域作为本次现场试验的标准测速区域,由现场标准装置中的现场标准测速仪2提供测量目标车辆的标准速度值,由现场标准测速仪1和3提供左右旁车道上干扰车辆的行驶速度值,并由相机6.b对每次测量结果进行拍照取证和号牌识别。
图6为该款侧装移动式机动车雷达测速仪样品的500组现场测速试验结果,现场标准测速仪的2次独立速度测量值的最大允许偏差同样设置为 ±1%。 在本次试验中,最低速度值为61.38 km/h,最高速度值为138.77 km/h,速度测量数据主要分布在70~120 km/h的速度区间内。500组测量数据的现场测速误差分布在-5.5~-0.5 km/h的范围内,其中,现场测速误差的最大值为-0.83 km/h,最小值为-5.42 km/h,平均值为-2.61 km/h。
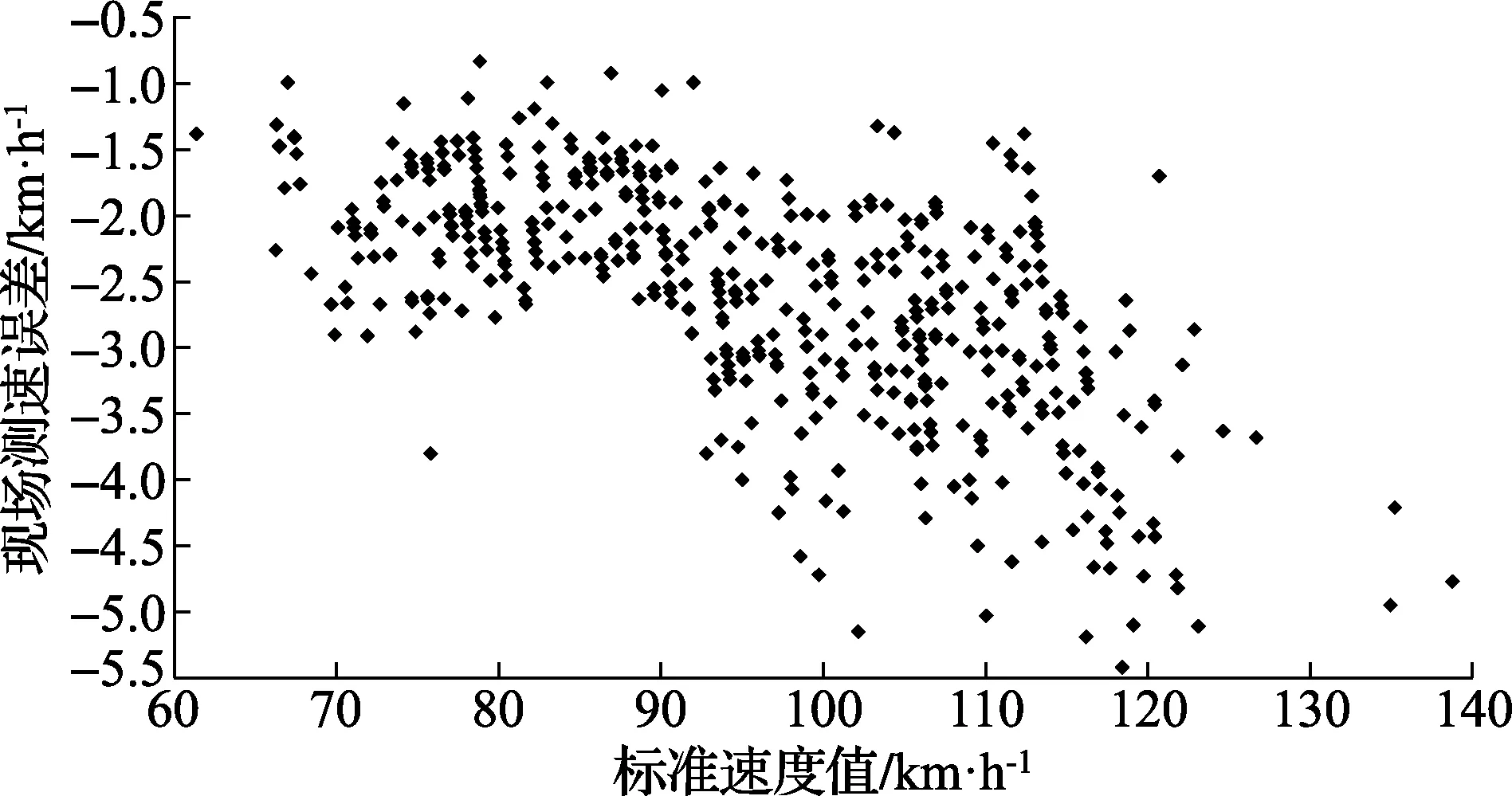
图6 顶装固定式机动车雷达测速仪现场试验结果
5 结束语
基于真实交通流量状态下的固定式机动车现场测速标准装置的建立,标志着我国在机动车测速仪现场计量检测领域和型式评价现场试验方面已经实现了与国际接轨。在20~250 km/h速度测量范围内,现场标准装置中所用的现场标准测速仪的相对扩展不确定度为0.12% (k=3),满足OIML R91中对现场测速标准装置的技术指标要求,该套现场标准装置还可以作为公益性现场试验平台,满足生产厂家样机现场试验及公安交管测速设备招标现场试验等社会需求。
[参考文献]
[1] 国家质量监督检验检疫总局. JJG 527—2015 固定式机动车雷达测速仪检定规程[S]. 2015.
[2] 国家质量监督检验检疫总局. JJG 528—2015 移动式机动车雷达测速仪检定规程[S]. 2015.
[3] 国家质量监督检验检疫总局. JJG 1074—2012 机动车激光测速仪检定规程[S]. 2012.
[4] 国家质量监督检验检疫总局. JJG 1122—2015 机动车地感线圈测速系统检定规程[S]. 2015.
[5] 白银, 孙桥, 杜磊, 等. 移动式机动车现场标准测速仪溯源技术的研究[J]. 计量学报, 2015, 36(1): 72-76.
[6] International Organization of Legal Metrology. OIML R 91, Radar equipment for the measurement of the speed of vehicles[S]. 1990.
[7] 国家质量监督检验检疫总局. JJF 1335—2012 定角式雷达测速仪型式评价大纲[S]. 2012.
[8] DU L, SUN Q, CAI C Q,etal. Verification methods and antenna horizontal beamwidth of across-the-road radar for traffic speed enforcement in China[J].Measurement, 2013, 46: 1512-1520.
[9] DU L, SUN Q, CAI C Q.,etal. Antenna Beamwidths of Above-The-Road Radar for Traffic Speed Enforcement in China[J].InternationalJournalofAntennasandPropagation, 2012, 492326, 9.
[10] 倪育才. 实用测量不确定度评定[M]. 北京: 中国计量出版社, 2008.
