飞机大部件装配测量基准网的一种校准方法
2018-06-22范晓骏
龚 婷 范晓骏
(上海飞机制造有限公司,上海 200436)
1 飞机装配测量基准网的定义
飞机装配过程中要将装配件定位到设计位置上(对齐关键控制点),而测量设备给出的是测量坐标系下的测量结果,因此需将测量坐标快速准确地映射到飞机设计坐标中。采用的方法是通过在测量域内设定固定的基准参考点并对基准点在飞机设计坐标系下进行定义。测量设备通过测量数字化定义的固定基准点,利用坐标转换算法,求解出坐标转换方程中坐标转换矩阵中的系数,从而完成测量设备坐标系与飞机设计坐标系的统一。这些为完成测量设备与装配部件、装配工装等坐标系的对准,所布设的一组可长时间使用的、被赋予已知坐标的固定目标点的集合就称为装配测量基准网,这些点在工程应用中也称为ERS点。对于测量基准网校准,最通俗的理解就是利用合适的方法,满足测量不确定度的要求,赋予ERS点空间坐标值。校准是测量基准网能被使用的前提,其结果对后续装配测量至关重要。
2 利用激光跟踪仪进行基准网校准
激光跟踪仪是典型的球坐标系数字化测量系统,以其大量程、高效率、高精度、便携性等优势广泛用于大型工业产品装配现场。国内外在飞机装配现场也通常利用激光跟踪仪来进行尺寸测量与定位,对于飞机大部件装配测量基准网的校准,激光跟踪仪是最合适的校准设备。由于大飞机部件以及现场工装设备的遮挡,单台激光跟踪仪无法在一个站位完成对整个装配空间内关键控制点的测量,因此采用多台激光跟踪仪协同工作或者单台激光跟踪仪转站位的工作方式来满足飞机测量需求(本文中以单台设备转站测量举例),而衔接测量坐标系和设计坐标系的基准网参考点也必须在不同的站位上满足转换方程的求解条件。校准基准网时,在两个站位上能同时满足测量条件的若干基准点为一组公共测量点,激光跟踪仪通过在两个站位上测量这组公共点进行坐标系的统一和测量网的拼接,同时每个站位又测量相邻站位中若干非公共的基准点用以扩大测量空间。当所有基准点都被包络到测量空间并满足解算条件后,就可以得到基准点的具体坐标值。
2.1 激光跟踪仪的布站方法
激光跟踪仪校准测量基准网时的站位应以满足装配测量所要求的坐标测量不确定度为目标,不确定度小,说明基准点赋值的可靠性越高[1]。激光跟踪仪对一个被测点单站测量的测量不确定度由以下分量构成,如表1所示。

表1 测量不确定度来源及说明
合成不确定度uc与各分量的关系为:

扩展不确定度U为:)

当激光跟踪仪转站时,设定设备在站位STS1上对基准点P的空间坐标测量不确定度为U1,设备到基准点P的距离为L1;设备在站位STS2上对基准点P的空间坐标测量不确定度为U2,设备到基准点P的距离为L2;若位于站位STS1和站位STS2之间的测量网基准点P的坐标测量不确定度要求为UP,则结合设备在两站位对同一点P的测量不确定度,应该有以下关系:

在公共交汇区内,两站位之间的距离满足D≤L1+L2。计算后,D<8.6m。由于现场还有其他一些不确定因素,实际的测量不确定度相比理论评估的会偏大,兼顾转站拼接质量和测量效率,激光跟踪仪相邻测站之间的距离大约为8m。
此外,考虑到基准网校准和基准网作为装配基准时坐标系的对齐精度,保证基准点的使用与赋值时的情况尽量一致,使飞机部件对接时的测量不确定度以基准网的不确定度为最主要的分量来源,有效降低其他未知因素的影响,故使用激光跟踪仪校准测量基准网时的站位应该包含实际大部件对接时测量设备的位置。综合上述分析,最终激光跟踪仪在16个站位上对测量基准网进行赋值。
3 利用SA软件的USMN功能提高基准网校准精度
3.1 飞机装配测量基准网的误差分析
在理想情况下,不同站位测得的公共点经坐标变换后的坐标值应该完全相同。但实际由于环境、人员、仪器自身、软件算法等各方面的不确定性,不同站位得到的坐标值并不完全一致。经过多站测量时,前一站位中一些不确定度较大的点将误差累加到下一个站位。
给测量基准网进行赋值时,传统上,人们采用最小二乘拟合法,这种方法是一种所有测量点权重相同的拟合方式,不确定度大的分量对整体量的影响不会被弱化,而且经过多次拟合后可能会累计增大。例如,激光跟踪仪如果只是简单地转站测量全机装配空间内所有的基准点,利用最小二乘法拟合的基准网与飞机设计坐标系错位超过0.15mm,根本无法满足测量基准网的精度要求。所以,在测量基准网拟合计算时,公共点测量误差导致的转站误差是决定基准网校准精度的最主要因素,确定各站之间各公共点转换方程的权重值成为拟合算法的关键。
3.2 USMN功能的原理
USMN也是将所有基准点的转站测量数据联系起来并统一在同一个坐标系中的技术[2]。与最小二乘拟合法最大的区别是,USMN采用智能加权平差进行数据处理,为每个拟合元素分配权重时,不确定度较小的公共点分配到的权重较大,而不确定度较大的公共点分配到的权重较小。所以,在拟合结果时,测量基准网的整体测量不确定度整合了各个基准点分量的相对不确定度优势,数值可以变小,从而提高基准网的赋值精度。
以激光跟踪仪两站测量为例,用不确定度点云来表示测量点的误差分布,两站跟踪仪对同一测量点P实施测量,距目标较近的第一站测量点形成一个较小的浅色点云,其长轴长度为a,短轴长度为c,距目标较远的第二站形成一个较大的深色点云,其长轴长度为d,短轴长度为b。设点P在第一站位测得的点坐标为P1(x1,y1,z1),在第二站位测得的点坐标为P2(x2,y2,z2)。加权平差法通过云图赋予转站过程中每个转站方程不同的权重。权重分配方式如式(4)所示[3]。(4)
式中:(α,β,γ)为对应三轴的旋转角度;(x,y,z)为对应三轴的相对平移量;f1、f2、f3为对应三轴三个转站映射函数;wz为z方向上的权重。多个点形成多个(4)式,对其进行拟合,完成拟合权重的重新分配。根据每个测量点坐标方向上的不确定度,在USMN拟合结束时,可以给出一个新的测量点PUSMN,PUSMN根据各个拟合点空间位置以及其不确定度的比例接近真实位置。这种USMN加权平差的拟合方式得到的结果相比最小二乘法更加显著地接近真实情况。
激光跟踪仪的测距精度明显优于测角精度,故利用USMN功能可以对跟踪仪测角误差进行优化,来自激光跟踪仪的距离测量值将分配到更多的权重,从而提高基准网三维坐标赋值的精度。
4 技术验证
对于全机对接装配现场的62个基准点(ERS)和14个临时目标点(用于激光跟踪仪转站拼接),使用激光跟踪仪分别在16个站位进行测量,每个被测点被4个测站以上同时观测到。通过USMN解算,得到的数据如表2所示。每一个ERS点的不确定度都在0.06mm内,符合测量基准网的校准要求。在基准网坐标系中引入飞机坐标系下的参考点的参考值,所建立的坐标系就是飞机装配坐标系,转换坐标系后基准点被赋予的空间坐标值就可以为后续装配测量所用。
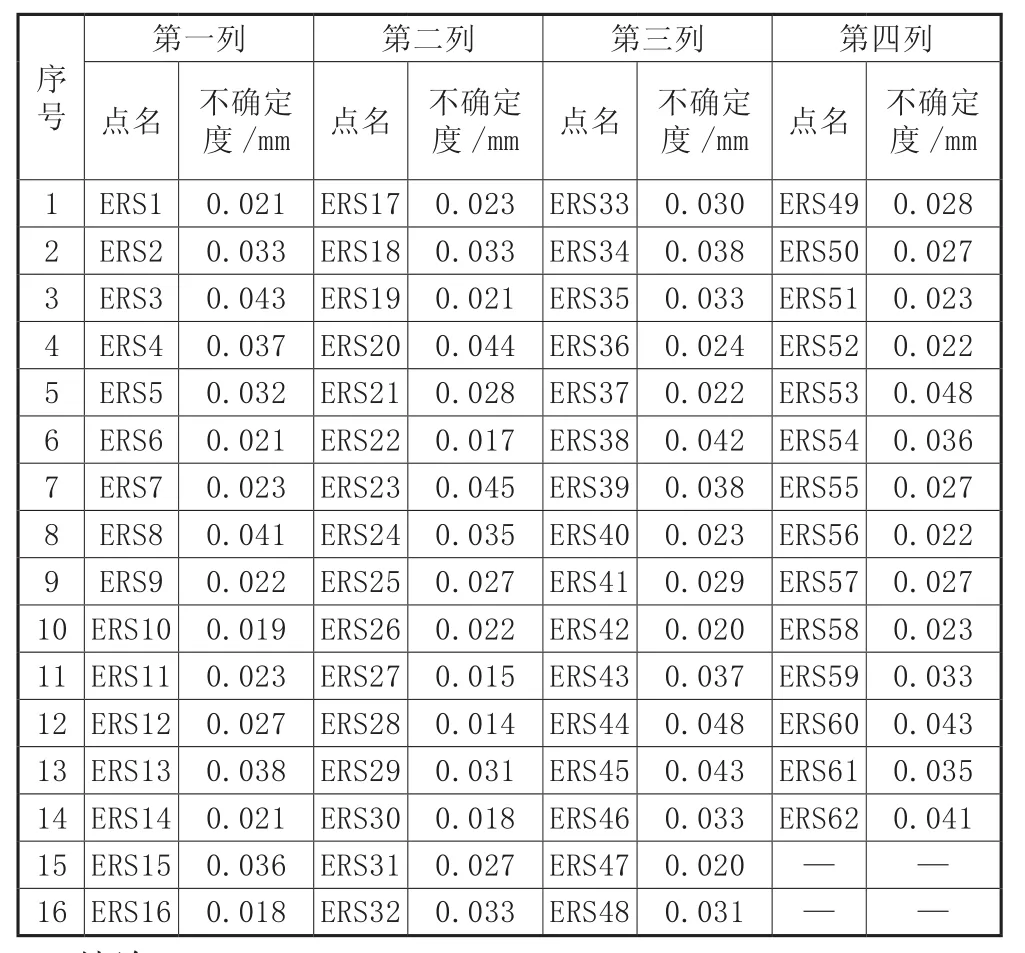
表2 USMN解算各基准点(ERS)不确定度
5 结论
结合具体的应用示例,本文通过激光跟踪仪校准基准网测量不确定度的分析,明确了激光跟踪仪校准测量网时测站和临时目标点布设的要求,并利用USMN功能对所有测站数据进行优化及解算。该方法提高了测量基准网的校准精度,提升了现场部件装配质量,为民机项目数字化装配奠定了基础。
[1]马骊群,曹铁泽,王继虎,等.大尺寸坐标测量技术在大型部件装配应用中的若干问题[J].计测技术,2013,33(2):7-11.
[2]张于.基于统一空间测量网络的大尺寸测量方法[J].航天器
环境工程,2011,28(3):277-281.
[3]周闻青,冷建兴,叶欣,等.基于USMN的大型操纵性水池基础轨道空间位置测量方法研究[J].计测技术,2016,36(3):10-13.
