基于曲柄滑块机构膝关节减力装置的设计
2018-06-22刘义杰周同德袁寅杰刘宇康
刘义杰 吴 健 周同德 袁 鹏 袁寅杰 刘宇康
(北京林业大学 工学院,北京 100083)
膝关节构造复杂、全身发病率高,对人体运动方式起着至关重要的作用,我国约有3%的人患有骨关节炎,膝骨关节炎占大部分比例[2]。目前对于适用于正常人日常行走膝关节减力机构的研究较少。为解决该问题,本文研究了基于曲柄滑块机构的膝关节减力装置。
1 膝关节减力装置设计
膝关节减力装置结构如图1所示。在人体步行时,直立阶段和跨步阶段两个阶段的快速切换会对膝关节造成冲击振动,膝关节减力装置旨在减轻振动并减少部分自身重量对于膝关节的压力。仿生关节与人体膝关节同步运作。弯曲时,力偏置片5随柔性护膝9的小腿部抬起,关节板2的第一端翘起与油压缓冲器4脱离;直立时,力偏置片5随柔性护膝9的小腿部前伸,油压缓冲器4抵靠关节板2的第一端,起到支撑的作用,减小对膝关节的损伤。
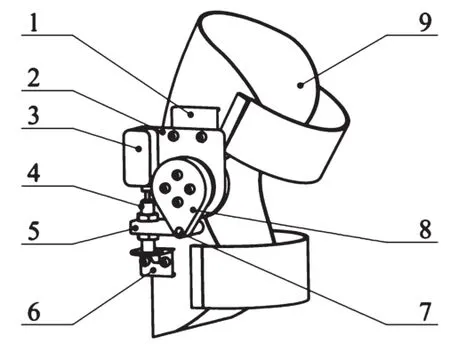
图1 膝关节减力装置结构
2 运动学与动力学分析
2.1 膝关节减力装置的数学模型
参照图1机构图,可将关节板2视为机架,固定于大腿部位,将限位封盖8视为曲柄,可绕关节板转动,油压缓冲器4的下端和力偏置片5固连,将其视为连杆,油压缓冲器4的头部为减振材料,可沿关节板2滑动,将其视为滑块。
基于复数矢量法,对曲柄滑块膝关节减力机构建立运动学模型,如图2所示。其包含关于ABC的闭环,在实际应用中,油压缓冲器4为执行机构。
2.2 膝关节减力装置的运动学求解
人体膝关节的限位角度区间为-75°~0°,因此取曲柄滑块机构模型中曲柄转角为15°~90°,当曲柄转角处于90°时,恰为人体直立状态。为使整体膝关节减力装置尺寸适于穿戴,取限位封盖8的可转动端长度与油压缓冲器4长度相等,试取为长度35mm,试取力偏置片长度为40mm,即曲柄长度l1=35mm,连杆长度
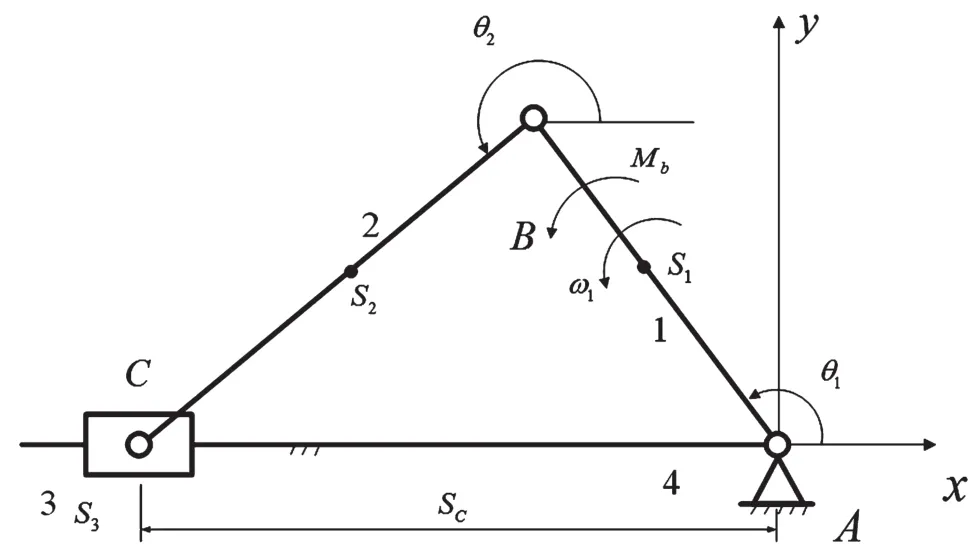
图2 曲柄滑块机构模型
3 分析与优化
3.1 曲柄长度对膝关节减力装置减力效果的影响
改变曲柄长度,图3为取力偏置片长度为55mm时,分别取曲柄长度为20mm、25mm、30mm、35mm时对应的减力大小曲线。分析可知,曲柄长度的改变对减力效果影响较小,在一定范围内,曲柄长度的增长会使减力幅度略有减小。
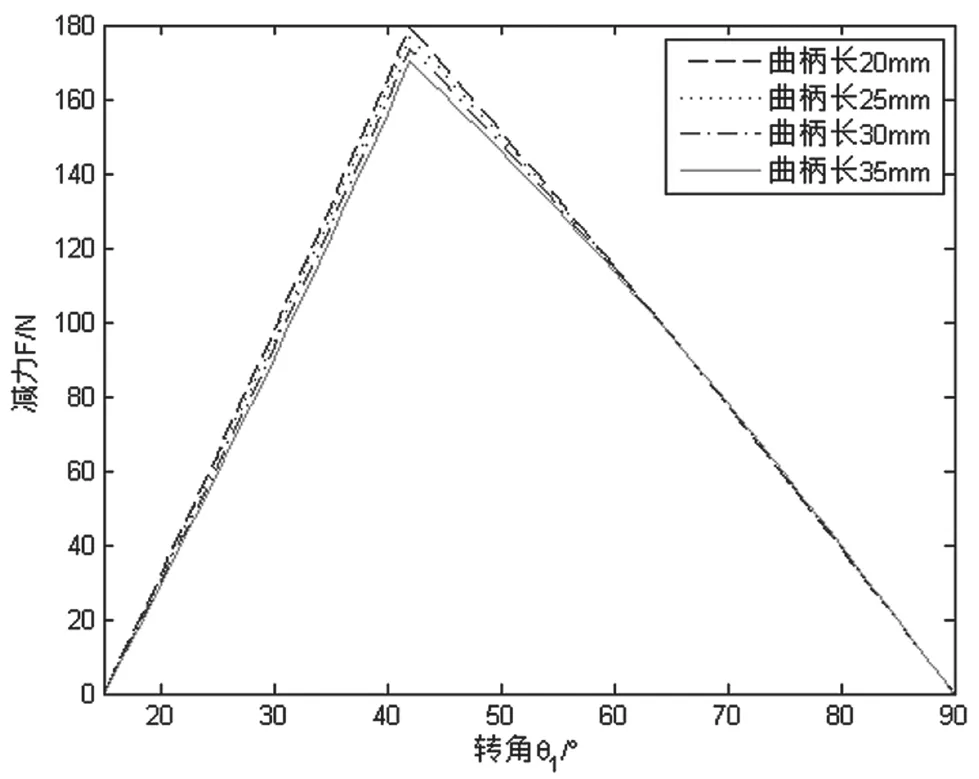
图3 改变曲柄长度的减力曲线
3.2 连杆长度对膝关节减力装置减力效果的影响
改变连杆长度,图4为取曲柄长度为35mm时,分别取力偏置片长度为40mm、45mm、50mm、55mm时对应的减力大小曲线,连杆长度为力偏置片和油压缓冲器长度的平方和的算术平方根,力偏置片长度增加,连杆长度增加。分析可知,连杆长度主要影响减力曲线的位置,在一定范围内,连杆长度的增长会使减力的幅度减小。
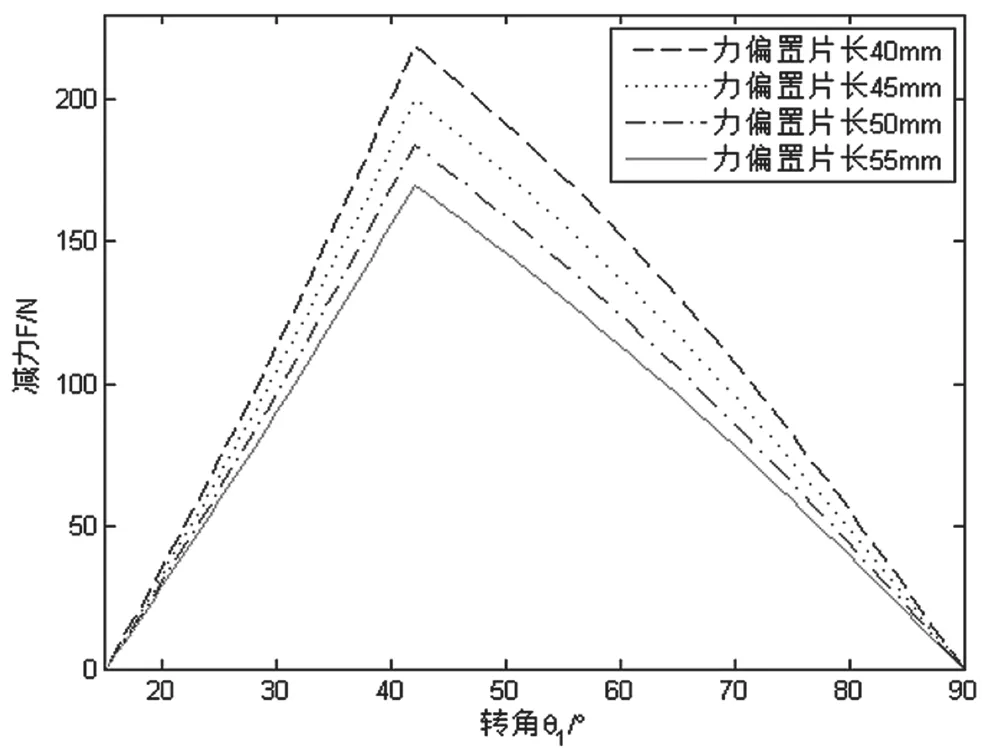
图4 改变力偏置片长度的减力曲线
4 结论
本文提出一种基于曲柄滑块机构膝关节减力装置。膝关节减力装置的减力效果与曲柄和连杆的长度密切相关,曲柄长度的改变对于减力效果影响较小,连杆长度的增长会使减力的幅度减小。
[1]王东海.基于行走步态的被动式重力支撑柔性下肢外骨骼系统[D].杭州:浙江大学,2016:1.
[2]王珺.外骨骼机器人下肢增力机构设计和仿真研究[D].杭州:浙江大学,2016:25.
