汽车直道超车道路试验方案
2018-06-21郑琦巍
张 振, 肖 威, 郑琦巍, 罗 勇, 余 飞
(1. 江西博能上饶客车有限公司, 江西 上饶 334000; 2. 广东芬尼克兹节能设备有限公司, 广州 511470)
据统计,2016年我国全年的汽车交通事故多达145 820起,比2015年增加16 665起,其中超车不当是引发交通事故的一项重要因素[1-2]。为了缓解因超车不当引发的交通事故,本团队前期已构建了直道超车轨迹运动学模型,并分析了汽车在城市主干路上以中速进行直道超车的安全转向幅度范围[3]。
为了验证直道超车轨迹运动学模型仿真结果的合理性,本文设计了一种城市主干路上的汽车直道超车道路试验方案(设计车速40~60 km/h)[4],用于采集、处理及显示相关时序数据,旨在为直道超车轨迹运动学模型仿真提供有效的验证。
1 试验方案设计及要求
在直道超车过程中,要求超越车的驾驶员完成换道(由原车道驶入超车道)和并道(由超车道驶入原车道)操作,汽车直道超车过程示意图如图1所示。

图1 汽车直道超车过程示意图
1.1 试验人员、车辆及路段的选择
1) 选用具备良好驾驶技能和心理素质的试验车驾驶员;车内观察员需具备良好的软件操作技能及观察能力,能完成试验前的软件调试及试验时的观察任务;车外观察员应熟悉试验规则,能准确判断超越车的行驶路径是否符合试验要求。
2) 超越车选用某东风雪铁龙牌汽车;基于安全性考量,被超车的位移采用不同间隔的路锥表示,根据直道超车轨迹运动学模型仿真结果,设定路锥间距为30 m[3]。
3) 作为汽车直道超车道路试验的场所,应尽量满足车流量少且路况良好的条件。本试验选取上饶市经开区附近的一段道路进行试验,该试验路段长度约为200 m。
1.2 试验设备
1.2.1 试验数据采集设备
为了获取汽车在直道超车过程中的时序数据,本团队集成了一套试验数据采集设备。通过将传感器接收到的信号由数据总线接口传递到计算机,可进行有效的存储、处理、显示和分析。该套数据采集设备由车载工控机、加速度模块、CAN总线解析器、GPS天线及锂电池等部件组成,如图2所示。

图2 试验数据采集设备
图2所示的试验数据采集设备可采集驾驶员肢体动作信息和车速信息。其中,驾驶员肢体动作的信息可通过采集转向盘转角、手动挡挡位、离合器接合、油门开度、转向灯开关及刹车开关等信息获取。
在实际的应用中,由于试验目的不同,需要采集的信息也有所差异。该套设备的功能较为丰富,试验人员可以根据具体的需要,选择相应的功能,从而完成对试验数据的采集任务。
在本试验中,可将转向盘转角传感器及车速仪表端子所采集到的信号,经过汇总并输送至信号处理电路板,信号处理电路板的各类信息通过模数转换与同步处理的方式,转换成数字的形式,再通过并口对转向盘转角及车速数据进行传输,从而达到显示、处理、存储及分析的目的。
该试验数据采集设备的信息采集模块结构示意图如图3所示。

图3 信息采集模块结构示意图
1.2.2 其他设备
为测量汽车直道超车过程中的转向盘转角信号,还需配置一个转角传感器,其工作温度范围为-40~85 ℃。该传感器基于ISO 26262安全标准,安装在转向柱上,并通过CAN总线与PCM连接[5-6]。另外,需要准备的设备还包括数据线、电源线、对讲机及望远镜等。
1.3 试验步骤及注意事项
1) 准备阶段。检查车辆及设备、掌握目标及方法、熟悉操作流程及试验路况。
2) 实施阶段。驾驶员以指定车速在车头接近第一个路锥处开始换道,且在车尾驶过第二个路锥处完成并道;车内观察员记录车况;车外观察员判断试验车行驶路径是否符合试验要求。
3) 后处理阶段。提取最符合试验路径要求的转向盘转角时序数据,保存为text文件,并导入Excel软件进行绘制,得到转向盘转角变化曲线。
4) 注意事项。试验过程中应保证安全性及数据采集的准确性,驾驶员需具备良好的精神状态并遵守交通规则;车内观察员除了必要的交谈之外,需保持安静;车外观察员需集中注意力。
2 试验数据的处理
转向盘转角时序数据的采集,即从转向盘转角传感器中采集信号,并通过接口将信号输送到采集系统内部进行分析和处理[7]。试验数据经后处理阶段得到指定车速下直道超车过程中转向盘转角变化曲线,其中,60 km/h车速下进行直道超车时的转向盘转角变化曲线如图4所示。
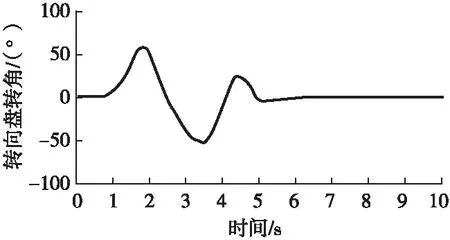
图4 60 km/h下试验车转向盘转角变化曲线
汽车在45 km/h、50 km/h、55 km/h、60 km/h、65 km/h 5种车速下进行直道超车试验时的最大转向角分别为47°、50°、54°、56°、58°。
对应本验证试验的直道超轨迹运动学模型仿真结果为:汽车在45 km/h、50 km/h、55 km/h、60 km/h、65 km/h 5种车速下进行直道超车的最大转向角分别为45°、48°、52°、56°、60°,与试验结果的误差值分别为-2°、-2°、-2°、0°、2°,表明仿真结果与试验结果较为接近,该试验方案能有效地验证直道超车轨迹运动学模型仿真结果的合理性。
3 结束语
本文提出了一种汽车直道超车道路试验方案,集成了一套试验数据采集设备,在城市主干路条件下采集了转向盘转角时序数据,验证了直道超车轨迹运动学模型仿真结果的合理性。为汽车直道超车运动的安全性研究提供了一种可行的思路。
参考文献:
[1] 中华人民共和国国家统计局.2016年汽车交通事故发生数(起)[EB/OL].(2017-03-27)[2017-09-25].http:∥data.stats.gov.cn/easyquery.htm?cn=C01&zb=A0S0D01&sj=2016.
[2] KRETSCHMER M,NEUBECK J,WIEDEMANN J.Combining vehicle dynamics control and decision making procedures towards safe overtaking maneuvers;Proceeding of the SAE 2005 Word Congress & Exhibition F,2005[C].Stuttgart:Springer,2005.
[3] 张振,郑安文,张良力,等.直道超车过程大角度快速转向安全性分析[J].中国安全科学学报,2015,25(6):46-50.
[4] 中华人民共和国住房和城乡建设部.城市道路工程设计规范:第5部分 非书资料:CJJ 37-2012[S].北京:北京市市政工程设计研究总院,2012:1.
[5] 刘军,秦书剑,周海森,等.汽车线控转向系统中转角传感器的研究[J].重庆理工大学学报,2014,28(7):1-4.
[6] 何磊,马伯祥,宗长富.线控转向汽车转向盘转角传感器的容错控制策略[J].汽车工程,2015(3):327-330.
[7] 姜高霞,王文剑.时序数据曲线排齐的相关性分析方法[J].软件学报,2014(9):2002-2017.