北斗接收机B1信号改进捕获算法研究
2018-06-15王尔申张双阳曲萍萍别玉霞胡志明沈阳航空航天大学电子信息工程学院辽宁省通用航空重点实验室沈阳110136
王尔申,张双阳 ,曲萍萍,别玉霞,庞 涛,胡志明(沈阳航空航天大学 .电子信息工程学院,b.辽宁省通用航空重点实验室,沈阳 110136)
北斗二代卫星导航系统是我国独立自主建设,稳定可靠,全球覆盖的导航系统,具有高精度、高可靠的定位、导航、授时服务,并兼具短报文通信能力[1-2]。卫星信号的捕获是接收机设计的重要环节,利用伪随机码良好的自相关特性,获取所有可见卫星信号的载波频率和码相位的粗略估计值。针对北斗B1信号的特点,如今比较成熟的捕获方法主要包括滑动相关器、基于FFT的捕获算法,基于快速傅里叶变换的频域并行搜索捕获算法根据时域相关等于频域相乘的原理,将时域二维搜索转换为频域一维搜索,虽然提高了捕获速度,但硬件资源消耗大,实现较困难,因此G.J.R.Povey等人最先提出了将匹配滤波与FFT结合的捕获算法[3];Kong S描述了在较大的多普勒频偏下的快速捕获系统,首次给出基于PMF-FFT结构的捕获算法[4],相较于之前的算法减少了傅里叶变换的次数,从而降低运算复杂度,降低硬件消耗,便于实现。基于PMF-FFT的并行搜索捕获算法结合了匹配滤波和FFT的特点,首先对接收的导航信号与本地伪码序列相乘,得到相乘累加后的数据,这是对输入数据的部分匹配滤波过程,然后对其进行FFT运算,进行频谱分析,大于设定捕获门限便可判定捕获成功。在捕获到码相位的同时可以得到多普勒频率值,真正实现了时域和频域的并行捕获[5-7],捕获速度快但占用资源较大。所以文中首先介绍分析传统捕获算法的优缺点,以基于PMF-FFT算法为基础,提出了改进的北斗信号捕获算法,该算法通过部分匹配滤波器将接收到的信号与本地产生的伪随机码进行部分相关运算,再将结果送入FFT模块,该方法是一种快速的伪码捕获方法,具有捕获时间短,捕获精度高等优点。
1 传统捕获算法
在传统的北斗卫星接收机中为实现对接收信号的快速捕获主要有两种方案,一种是在时域上进行滑动相关法,另一种是利用变换域进行快速傅里叶变换(FFT)和快速傅里叶逆变换(IFFT),计算得到多普勒频移估计和码相位估计。
时域串行捕获是在一定的频率范围和码相位范围内以一定的频率步长和码相位步长来进行二维搜索,原理如图1所示。输入的信号首先与本地载波同向和正交分量相乘,得到I、Q两条支路信号,然后再分别和本地伪码在某个伪码相位处进行相关运算,最后由积分器给出积分结果[8-9]。对每滑动一个载波频率和伪码相位都会得到一个I、Q相关器输出的相关结果,当完成所有可能的载波频率和伪码相位时,通过判断是否出现满足要求的相关尖峰来判定捕获是否成功,并得到对应的卫星号、多普勒频率和初始码相位的三维捕获结果[10]。
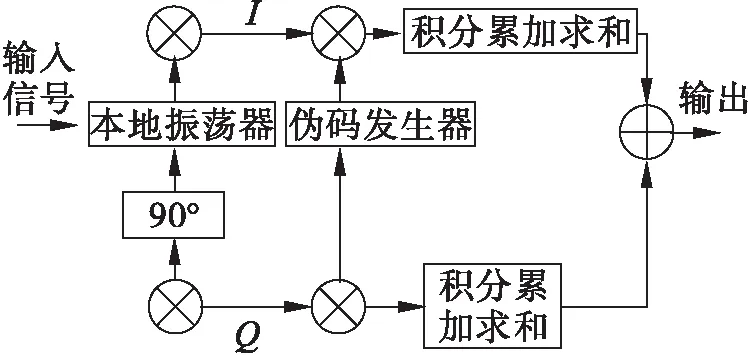
图1 时域串行捕获算法原理
基于FFT的并行码相位捕获算法是采用快速傅里叶变换,将时域信号变换到频域上进行处理,时域卷积运算变换为频域相乘,算法实现如图2所示。首先将输入信号与本地载波信号相乘,得到I、Q支路的分量信号,如果载波频率与输入信号的载波频率一致,则输入信号的伪随机码信号得到恢复。将恢复后的伪随机码信号经过傅里叶变换,得到其频域信号,同时将本地产生的伪随机码进行傅里叶变换并取其共轭,与输入信号的频域结果相乘后的值经过傅里叶逆变换,取模后得到时域相关结果,可查找到最大的相关峰值,通过与捕获门限比较,判定捕获成功与否,峰值的索引值对应了输入信号的码相位和多普勒频率[11-13]。
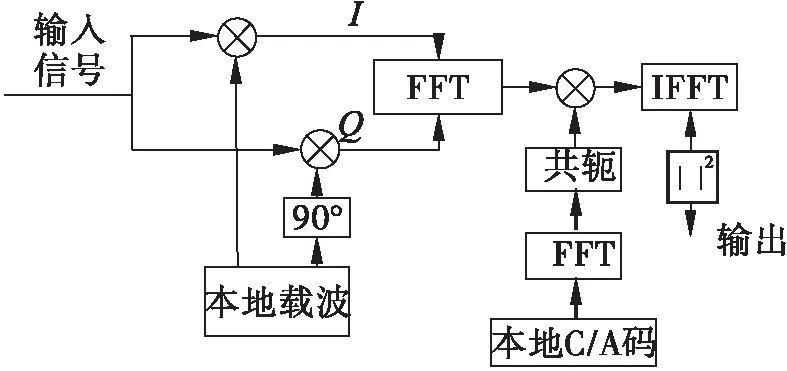
图2 基于FFT的并行码相位捕获算法原理
时域捕获方法的优点是实现简单,但由于捕获码相位与多普勒频移的范围较大导致其捕获速度慢。而并行码相位捕获的优点是捕获速度快但要做多次的多点FFT和IFFT运算,实现复杂度高、运算量大[14]。为解决捕获时间和实现复杂度二者之间的矛盾,文中对时域搜索和频域搜索相结合的基于PMF-FFT的改进捕获方法进行研究。
2 改进捕获算法
匹配滤波器是最佳线性滤波器,利用匹配滤波器进行卫星信号捕获时,当接收到的卫星信号等间隔的滑过本地伪码序列时,匹配滤波器在每一个时间点都会输出一个相关值。在已知输入信号的情况下,与其它线性滤波器相比匹配滤波器所得到的输出信噪比最大。当输入端信号为
X(t)=s(t)+n(t)
(1)
其中是s(t)为输入信号,n(t)为功率谱密度是n0/2的高斯白噪声,系统冲击响应为h(t),频率响应为H(ω)[15]。
输入信号和输出信号的频谱函数分别为
(2)
So(ω)=S(ω)·H(ω)
(3)
所以输入信号s(t)通过滤波器后的相应so(t)为[16]
(4)
当滤波器输出功率信噪比SNR最大时,匹配滤波器的系统函数为
H(ω)=kS*(ω)e-jωt0
(5)
h(t)=ks*(t0-t)
(6)
其中,k=1。输出信号为
so(t)=s(t)*h(t)=kR(t-t0)
(7)
所以匹配滤波器的输出波形是输入信号自相关函数的k倍,因此匹配滤波器可以看成是一个计算输入信号自相关函数的相关器[17],下变频后的信号一路被送入寄存器中,另外一路寄存器中存有某一相位状态的伪码序列。每送入一个信号,两路寄存器对应位置各自完成一次相乘运算并将结果相加,相当于完成一次相关运算,这就是使用匹配滤波器要比利用串行搜索捕获速度要快的原因。但是使用匹配滤波器,如果加长相关长度,会使得硬件资源需求增大,此外对多普勒频率比较敏感。
利用PMF-FFT算法进行信号捕获,结合了匹配滤波和FFT的特点,在捕获到码相位的同时就可以得到多普勒频率值,实现了将码相位、频率的二维搜索转换为码相位的一维搜索。在捕获过程中,接收信号经正交下变频后输出为
S(t)=PN(t)ej(2πfdnTc+φ)+nI(t)+jnQ(t)
(8)
其中fd为频偏,φ为初相,nI(t)和nQ(t)为相互独立的高斯噪声。
PMF-FFT的输入信号
S(n)=PN(n)ej(2πfdnTc+φ)+nI(n)+jnQ(n)
(9)
本地伪码与接收码同步时
Sd(n)=S(n)×PN(n)=ej(2πfdnTc+φ)+[nI(n)+jnQ(n)]PN(n)
(10)
第i个部分匹配滤波器的输出
(11)
基于PMF-FFT的捕获算法原理如图3所示,首先将读取中频数字信号,设定共有s点的信号,将其补1后分为存储在x行N列的矩阵matrix中,每一行为一组中频数据,对本地的码NCO同样产生相同时间的本地伪码,为提高FFT的频率分辨率进行补零后存储到矩阵LoCAmatrix中,将两个矩阵点乘后对每一行进行求和,这个部分相关过程便为部分匹配滤波。然后将得到的数据做N点的FFT运算,快速傅里叶变换的目的是进行频谱分析后纠正频偏,求出相关峰最大值和相关峰平均值并得到比值,大于设定门限则表示信号被捕获。这里的门限判决方法与上一节中研究的基于FFT的并行捕获算法的判定方式类似,当捕获到信号后可根据滑动的次数索引得到本地伪码相位与实际信号相位差的粗略结果,由于采用大步进搜索方案,所以此时的结果只是将搜索范围缩小至步进量之间,更加精确码相位信息需要通过进一步的精捕获过程来获得,这样得到的码相位误差可以控制在0.5个码片内以,作为后续跟踪环路的初始化参数。
3 算法仿真与结果分析
利用PMF-FFT捕获算法可以克服传统捕获算法速度较慢的缺点,此外还可以避免单独采用匹配滤波器捕获方式中相关峰值衰减严重的缺点。当每次滑动的码片数量较多时,采用大步进的PMF-FFT捕获,利用相位上相差一个码片的一段步进量的伪码之和作为本地伪码,对叠加后的信号进行捕获,此时对于接收到的信号,如果和本地伪码错开1个码片,会导致其不会出现相关峰值。由于对本地伪码的叠加会造成信噪比的损失,导致捕获的概率相对降低,所以PMF-FFT算法通过牺牲捕获的灵敏度来换取捕获速度的提高。图4可以看出捕获概率与输入信号信噪比的关系。
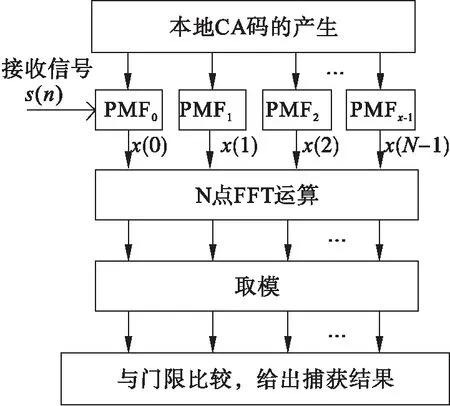
图3 PMF-FFT捕获算法

图4 捕获概率与信噪比的关系
PMF-FFT的输入信号使用的数字中频信号频率为0.098 MHz,采样频率为10 MHz,经过下变频后,以码片速率对其进行采样,得到2ms数据,即4092点,通过补零后将其变换为64*64的矩阵形式,实验设置PMF-FFT的分段数目为64段,FFT的点数为64点。首先利用相位上一次相差一个码片的64段伪码之和的本地伪码做相关运算,然后做FFT运算找出粗略的码相位,此时码相位的模糊度为64,最后在这64个相位的范围内进行PMF捕获,找到精确的码相位。利用伪码分成64段,与基带信号进行相关,对应元素相乘之后求和,然后对矩阵的每一行数据求和,做64位FFT变换,每次移动64位码片,每一行为移动一次的FFT结果,2 ms数据只需移动64次,通过计算得到相关峰平均值,结果如图5所示。
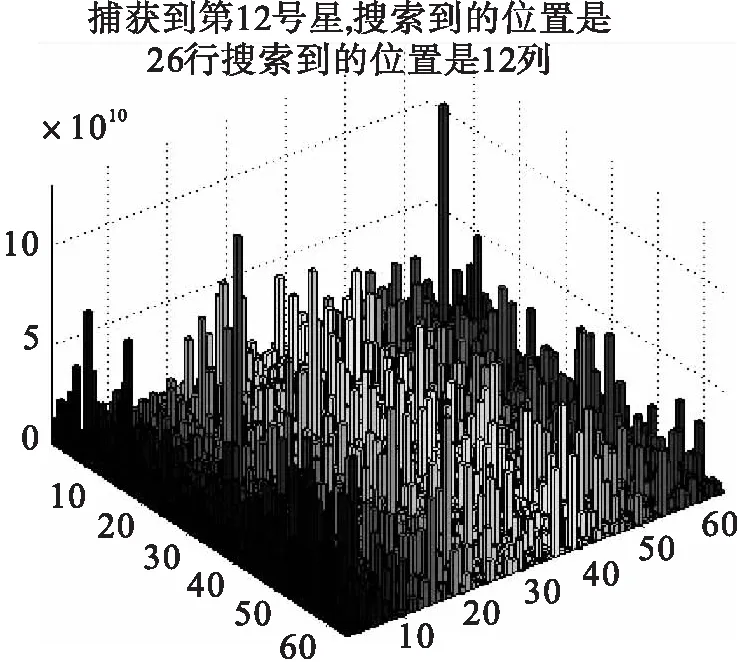
图5 相关峰值对应的码字相位仿真图
图6是利用PMF-FFT算法对12号卫星三维捕获结果,X轴为多普勒频移,Y轴为码相位,Z轴为相关输出。
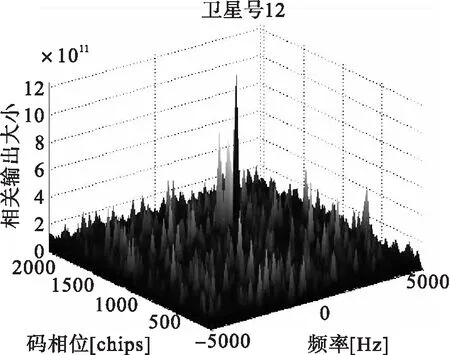
图6 捕获到的12号卫星三维结果
由图6可知存在一个峰值为FFT输出幅度,如式(12)所示
(12)
多普勒频率的值为
(13)
式中,N表示累加后的数据的点数,L表示CA码码片个数,fd表示多普勒频率,R表示FFT点数,r表示出现最大值的位置,x表示进行累加的数据的点数,Tc表示CA码的码元宽度。通过PMF-FFT算法得到12号卫星的初始码相位为660,多普勒频移约为1 400 Hz。
图7是利用传统的基于FFT的并行码相位捕获结果,通过二者对比分析,改进算法可以正确有效的捕获到卫星信号。利用改进后的PMF-FFT算法进行粗捕获和使用传统的基于FFT的快速捕获算法对2 ms 4096点的采样数据进行处理需要做的运算量,对比如表1所示。可以看出基于PMF-FFT的改进捕获算法在运算复杂度和计算量上得到优化,可以有效地提高捕获效率,节约捕获所消耗时间。

图7 传统算法捕获到的12号卫星结果

表1 两种捕获算法运算量对比
接收机的首次定位时间是接收机从上电到实现有效定位所花费的时间,是衡量一个接收机性能的重要指标,在北斗接收机中信号在捕获上所用时间是所有环节耗时中最冗长的一部分,所以提高信号的捕获速度对缩短接收机定位时间意义重大。最短捕获时间对应于初始的本地码刚好与接收信号的码字对齐;最长捕获时间对应将全部的码相位搜索完毕所需时间,利用大步进的PMF-FFT算法进行捕获,由于在粗捕获后对64个模糊相位进行精确捕获所用时间远小于粗捕所用时间,所以相对于传统捕获方法捕获时间提高了64倍,大大加快捕获速度,缩短了首次定位时间。
4 结论
文中通过分析PMF-FFT捕获系统的数学模型以及性能,将部分匹配滤波器与FFT相结合实现快速捕获的改进算法,通过降低捕获灵敏度来提高捕获速度。通过对算法的理论分析和利用实验平台采集卫星导航中频数据进行算法验证,结果表明:研究的捕获算法能够准确的得到可见卫星的多普勒频率和初始码相位,相对于传统捕获算法降低了运算量和复杂度,缩短了捕获模块在接收机信号处理中的运算时间。
参考文献(References):
[1] 王尔申,张述杰,雷虹,等.“北斗”导航系统和无线电台在无人机监控系统中的应用[J].电讯技术,2013,53(7):831-834.
[2] QI J,LUO F,SONG Q.Fast acquisition method of naviga-tion receiver based on folded PMF-FFT[C]//Proc.Com-puting,Communications and IT Applications Conference( Com Com Ap) .S.l:IEEE Press,2014:62-66.
[3] 任志玲,杨春燕,牛江龙.基于PMF-FFT的北斗B1I弱信号捕获算法研究[J].测控技术,2015,34(10):15-18.
[4] 冯小鹏.高动态环境北斗卫星信号捕获算法研究[D].长沙:中南大学,2013.
[5] 章兰英,袁嗣杰,刘海洋,等.基于加窗PMF-FFT的扩频信号捕获算法研究[J].系统仿真学报,2009,21(17):5536-5539.
[6] 廖伟,郭承军.GNSS数字下变频设计与分析[J].电光与控制,2017,24(01):72-75.
[7] LI J H,BA X H,SHERAZ A,et al.An adaptive algorithm for fast acquisition of GPS signals.Chinese Journals of Electron Devices,2007,30(3).
[8] 孟苑.北斗导航接收机B1信号捕获算法研究及其FPGA验证[D].南京:东南大学,2016.
[9] 刘艳华,赵刚.基于PMF-FFT的PN码捕获方法及性能[J].通信技术,2009:42(1):24-26.
[10]郑伦贵,尤政,张高飞,等.基于非相干积分的GNSS弱信号捕获[J].清华大学学报(自然科学版),2014,54(6):794-798.
[11]LIU GAOHUI,CAO JIAKUN.Acquisition method and perfor-mance of high dynamic GPS signal [J].Computer Engineeringand Applications,2010,46(7):142-144.
[12]王尔申,胡志明,雷虹,等.北斗二代信号精频捕获算法研究[J].电光与控制,2016,23(12):14-17+22.
[13]王庆雷.北斗导航信号捕获算法研究及北斗授时服务系统设计[D].西安:西安电子科技大学,2014.
[14]洪冰清,覃新贤,刘聪聪,等.弱信号下“北斗”接收机NH码的快速捕获[J].电讯技术,2017(11):1260-1265.
[15]李献斌,王跃科,周永彬.导航星座星间链路信号自适应捕获方法[J].系统工程与电子技术,2015,37(1):12-16.
[16]ZHU L F,ZHANG C X,MA Z Q.Fast fine acquisition algorithm of GPS receiver aided by INS information [J].Journal of System Engineering and Electronics,2011,22(2):300-305.
[17]辛富国,李荣芳.GNSS信号捕获与跟踪算法的改进与实现[J].电信科学,2014,30(3):105-108.
