早产儿血氧饱和度自动控制系统设计
2018-06-15侯雪丰RogerFales沈阳航空航天大学机电工程学院沈阳036密苏里大学机械与航空工程学院哥伦比亚65
回 丽,侯雪丰,,Roger Fales(.沈阳航空航天大学 机电工程学院,沈阳 036;.密苏里大学 机械与航空工程学院,哥伦比亚 65)
胎龄少于32周或出生时体重小于1.5千克的早产儿,由于肺部尚未发育完全[1],通常需要呼吸辅助系统的支持。而过多或过少的氧气都会导致新生儿长期并发症的产生,如慢性肺病、早产儿视网膜病变(ROP)、脑组织损伤等,重者甚至危及生命[2]。当前在新生儿重症监护室(NICU)中,患儿吸入的氧气浓度被医护人员传统的手动调节严格控制。根据美国儿科学会推荐的NICU人员编制指南,每名医护人员最佳照料的低危患儿数量在3到4名[3],而实际临床中,每名医护人员照料的患儿数量远超该推荐值。人员短缺问题不仅加大了医护人员的工作负荷,同时也使早产婴儿长时间暴露在血氧饱和度的安全范围以外,增加了其患长期并发症的几率。统计数据表明,早产婴儿仅有约50%的时间处于血氧饱和度的安全范围内[4]。为减轻医护人员工作负担,并延长婴儿血氧饱和度处于安全范围内的时间,研发一套具有临床可行性的早产儿血氧饱和度自动控制系统具有重要的实际意义。
1 控制器设计
1.1 早产儿呼吸系统动态模型
对早产婴儿的呼吸系统建立真实可靠的数学模型是设计准确稳定的控制器的前提。早期的人体呼吸系统模型是基于成年人的,后来在成年人的基础上,研究人员逐步发展了对新生儿呼吸系统模型的建立。Grodins 等人于1967年率先提出利用非线性方程组来建立人体呼吸系统动力学模型,该模型能较好地适应人体多变的环境,例如二氧化碳的摄入,新陈代谢异常等[5]。Demeester等人对其进行了发展,建立了由3个简单的子系统构成的模型[6]。美国伦斯勒理工学院的Yu等人进而对该模型线性化,以吸入氧气浓度作为唯一的输入变量,建立了动脉血氧分压(PaO2)与FiO2之间的关系[7]。美国密苏里大学研究团队Timothy等人对大量原始医疗数据进行分析,发现早产婴儿的吸入氧气浓度与血氧饱和度之间的关系(FiO2-SpO2)可以用一阶动态系统来较好地表示[8],如公式(1)所示。
(1)
其中SpO2为血氧饱和度,FiO2为吸入氧气浓度,Gp为系统增益,τ为系统时间常数。该模型的建立为实现早产儿血氧饱和度自动化控制奠定了基础。
1.2 比例-积分控制器
鉴于被控对象为一阶线性系统,初步设计采用传统的比例-积分控制器[9]。由于气体的输送存在延迟,时滞效应将会对控制系统的品质产生不良影响。在反馈回路中采用微分反馈可以使系统偏差具有一定的预估性,从而能够有效地抑制响应超调,并提高系统响应的鲁棒性[10]。PI控制器与微分反馈系统原理图如图1所示。
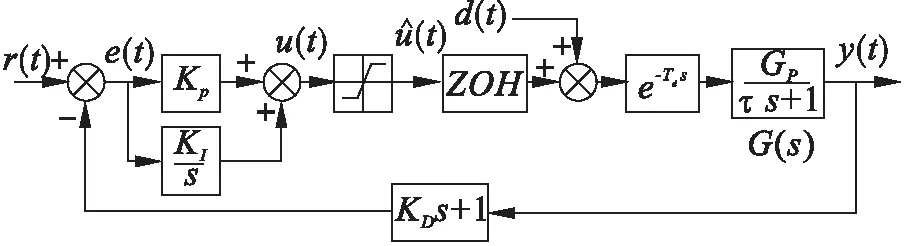
图1 比例-积分控制器原理框图
图1中,参考值r(t)为早产儿SpO2的理想值,通常为由医护人员选取的安全范围的中间值,e(t)为系统输出y(t)与参考值r(t)的偏差。PI控制器的输出量如式(2)所示。

(2)
选取适当的比例常数Kp与积分常数KI可使控制系统获得较快的响应速度并减小系统稳态误差。作为安全保护,医护人员为每位患儿设定FiO2上下限, 为实际输出的控制信号,即实际输送给患儿的氧气浓度FiO2,如式(3)所示。
(3)
控制信号经零阶保持(Zero-Order Hold),每10秒对FiO2做出一次调整。由空气-氧气混合器流经输送管路将经历时长为Td的延迟最终达到患儿的鼻腔。早产儿的呼吸系统动态模型由一阶传递函数G(s)表示,系统输出量y(t)为患儿SpO2的响应变化。由外界环境影响以及婴儿生理体征的变化引起的血氧饱和度减饱和现象,即SpO2值骤降现象,由扰动输入量d(t)表示。微分反馈回路中的微分时间常数KD选取为延迟时间Td,从而使系统获得(t+Td)时刻的预估偏差[11],如式(4)所示。
e(t)=r(t)-y(t+Td)
(4)
1.3 比例-积分控制器的抗积分饱和设计
积分饱和现象是控制系统的一种常见现象,当系统出现某一方向的偏差,比例-积分控制器的输出将在积分作用下不断累积增大,如果执行机构达到极限位置后偏差仍无法消除,系统输出将进入饱和状态。当反向偏差出现,执行机构不能及时做出相应的改变而是继续停留在极限位置直到系统退饱和[12-13]。积分饱和现象将造成控制系统性能的恶化,应采取有效的抗积分饱和机制进行削弱或避免。
积分控制项的输出与偏差幅值以及偏差持续的时间直接相关,在早产儿血氧饱和度自动控制系统的临床试验当中,医护人员以SpO2安全范围的中间值作为控制系统的参考输入量,通常系统偏差的幅值在小范围内变动,若发生血氧饱和度减饱和现象,误差幅值或会较大,但持续的时间通常较短,因而不会引起较大的误差累积。下面将讨论两种在临床试验中发现的引起积分饱和的主要情况以及相应的抗积分饱和机制。
1.3.1 手动调节模式引起的积分饱和
早产儿血氧饱和度自动控制系统具备手动-自动模式间自由切换功能,自动调节模式有助于降低医护人员的工作负荷,但仍不能完全取代医护人员的手动调节。例如选取早产儿SpO2的安全范围以及相应的FiO2极值需由医护人员采用“滴定法”手动调节确定[14]。当早产儿的生理指标发生异常变化时,医护人员也将采用手动调节并予以严密监控。当手动调节下的SpO2与系统的参考输入值之间长期存在偏差,控制器输出在积分作用下会不断累积,当切换至自动模式后,执行机构会因控制器的输出信号过大而发生突变,不能维持FiO2的当前水平。在缺乏无扰动切换机制的情况下,系统退出积分饱和区的时间较长,患儿SpO2值将会因为高浓度氧而长时间超出安全范围,甚至长时间处于饱和值99%,这将大大增加早产儿患视网膜病的风险[15]。
1.3.2 早产儿进食过程引起的积分饱和
另一类引起积分饱和的情况发生于早产儿进食期间。由于低胎龄的早产儿尚未具备自主吮吸、吞咽动作与呼吸相协调的能力,临床中通常以经鼻或经口的管饲喂养方式辅助患儿进食[16]。在管饲喂养的过程中患儿会发生血氧水平偏低的现象。当采用鼻饲管喂养时,鼻饲管会阻塞患儿部分鼻腔,增大了呼吸阻力;当采用口饲管喂养时,导管的移动会刺激迷走神经,因而导致了患儿心动过缓或呼吸暂停风险的提高[17]。在进食过程中始终偏低的SpO2可能导致积分饱和现象,控制系统不断提高氧气浓度直至达到FiO2上限。当进食结束,患儿呼吸恢复正常,其SpO2会因高浓度的氧气而立刻升高至超出安全范围。在缺乏抗积分饱和机制情况下,当系统出现反向偏差时,FiO2无法及时做出降低调整,将导致患儿长时间暴露在高含氧量环境中。
1.3.3 抗积分饱和的PI控制器
为避免上述两种在临床应用当中可能发生的积分饱和现象,并尽可能地缩短患儿SpO2在安全范围以外的时间,对PI控制器进行抗积分饱和设计十分必要,原理图如图2所示。
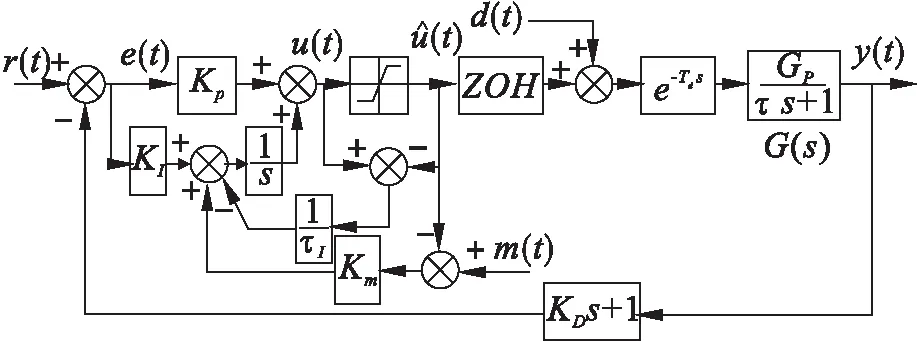
图2 比例-积分控制系统的抗积分饱和设计原理框图

u(ti)=Kpe(ti)+
(5)
2 仿真与实验结果
为验证抗积分饱和PI控制器是否能够有效避免因手动调节以及患儿进食引起的积分饱和现象,并证明早产儿血氧饱和度自动控制系统具备临床可行性,分别进行了计算机仿真以及模拟临床试验。
2.1 基于Simulink的动态系统仿真
借助可视化仿真软件Simulink对两种控制器的动态性能进行分析,分别模拟了手动调节以及自动调节过程中SpO2减饱和、患儿开始进食、患儿结束进食等多个环节。动态模型参数设置如表1所示,控制器参数设置如表2所示。

表1 动态模型参数
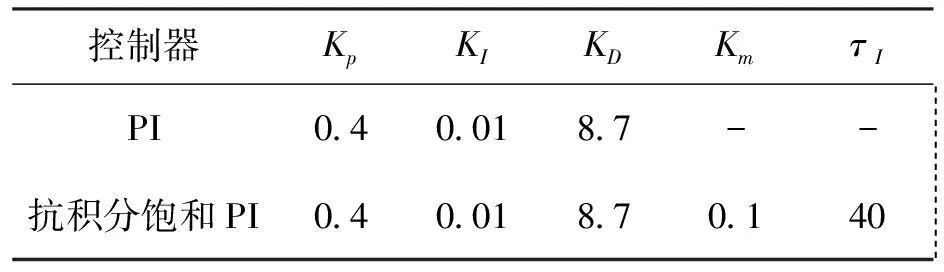
表2 控制器参数
仿真总时长为6 000秒,手动控制模式位于0~600秒,自动控制模式为之后的5 400秒。在自动控制模式中,SpO2减饱和发生在t=1 800 s,扰动输入为d(t)=-10,患儿开始进食发生在t=2 400 s,并伴随有轻微的SpO2减饱和现象d(t)=-5,患儿的进食时长通常为30分钟,在管饲进食期间患儿的血氧饱和度将处于偏低水平,选取SpO2=93%作为其间的均值,患儿于t=4 200 s结束进食。
由仿真结果图3所示,抗积分饱和PI控制器能够较平稳地进行模式切换。而在控制模式切换的瞬间,普通PI控制下的输出发生突变,远高于上一时刻的FiO2值,SpO2由于较高的氧气浓度而升高并饱和于99%,直到FiO2下降至正常值。在发生SpO2减饱和现象时,两种控制器均能有效地应对,并且没有明显的超调发生。在患儿进食过程中,控制器输出不断攀升,在达到FiO2上限后处于饱和状态。当患儿进食结束后,SpO2随即由于高浓度氧气的作用而升高至99%,抗积分饱和PI控制器能够在出现反向偏差的瞬间开始降低FiO2,而普通PI控制器需等候较长时间的退饱和过程才能开始下调。对比两种控制器在出现积分饱和情况时的表现可以看出,抗积分饱和PI控制器可以明显缩短早产儿血氧饱和度超出安全范围的时间。

图3 两种控制器动态仿真结果对比
2.2 基于早产儿呼吸系统模拟器的模拟临床试验
模拟临床试验以早产儿呼吸系统模拟器为控制对象,模拟在临床环境中使用早产儿血氧饱和度自动控制系统可能遇到的情形。早产儿呼吸系统模拟器是以Labview软件为编程平台,在对大量数据分析建模的基础上为验证早产儿血氧饱和度自动控制系统临床可行性而设计的。它能够模拟患儿发生不同程度的SpO2减饱和现象以及在FiO2变化后患儿的复苏,并且能够模拟患儿进食过程中SpO2偏低的情况。模拟器产生SpO2信号发送给控制系统,控制系统计算输出量对FiO2进行调节,由氧浓度分析仪测量氧气浓度并发送给模拟器,模拟器根据FiO2的变化生成新的SpO2信号,由此形成一个闭环控制系统。模拟临床试验所采用的控制器参数以及动态模型参数与动态仿真所采用的参数一致,控制器为抗积分饱和PI控制器,模拟结果如图4所示。
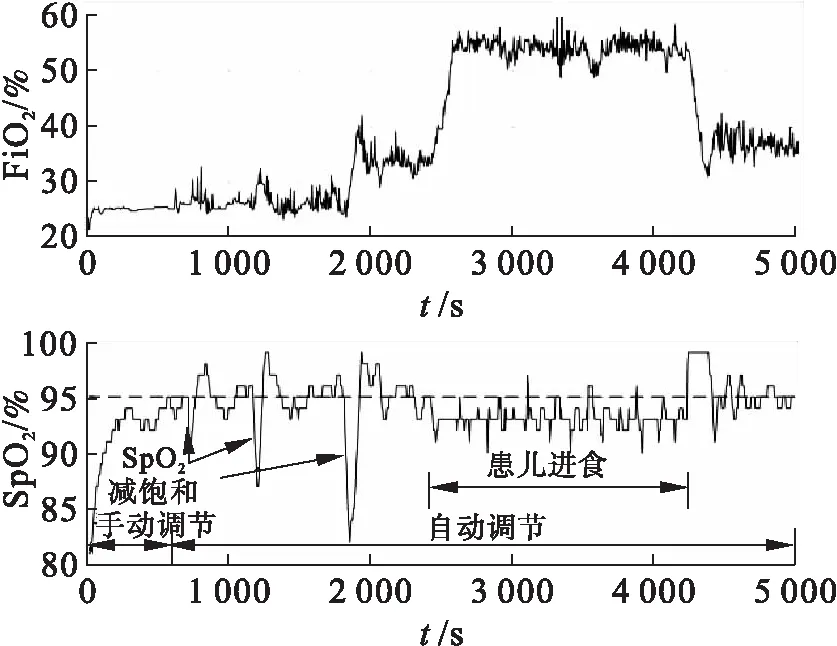
图4 抗积分饱和PI控制器模拟临床试验结果
由图4可以看出,早产儿血氧饱和度自动控制系统能够有效地应对不同程度的SpO2减饱和现象,复苏后的SpO2能够稳定在参考值95%附近,由于传感器存在噪声并在测量氧浓度变化时存在反应延迟,系统响应表现出一定的超调。采用抗积分饱和PI控制器在手动模式切换至自动模式的瞬间执行机构过渡平滑。在模拟患儿进食结束后,该控制器能够在反向偏差出现后及时减小FiO2,从而极大地缩短SpO2处于安全范围以外的时间。
3 结论
本文介绍了一种根据临床需求设计的早产儿血氧饱和度自动控制系统,并采用计算机仿真以及模拟临床试验对该设计进行了验证,主要结论如下:
(1) 设计开发了一种针对早产儿血氧饱和度调节的自动控制系统;
(2) 提出了一种抗积分饱和的PI控制器设计方法,用以避免或消除控制系统在实际临床应用中因操作模式切换或患儿进食所引起的积分饱和现象;
(3) 经试验验证,该控制系统可以有效地避免在手动模式切换至自动模式瞬间执行机构发生突变,可实现平滑过渡;在模拟进食结束后,该控制器能够极大地缩短SpO2超出安全范围的时间;在应对不同程度的SpO2减饱和现象时,控制系统响应及时准确,复苏后的SpO2能够稳定在设定参考值附近。结果表明,该自动控制系统具备临床可行性。
参考文献(References):
[1] 余章斌,沙莉,韩树萍,等.不同浓度氧气复苏窒息极早产儿的系统评价[J].中国新生儿科杂志,2011,26(5):343-348.
[2] FATHABADI O S,GALE T J,OLIVIER J C,et al.Automated control of inspired oxygen for preterm infants:what we have and what we need[J].Biomedical Signal Processing & Control,2016,28:9-18.
[3] JEANNETTE A.ROGOWSKI,DOUGLAS STAIGER,THELMA PATRICK,et al.Nurse staffing and NICU infection rates[J].JAMA Pediatr,2013,167(5):444-450.
[4] LAPTOOK A R,SALHAB W,ALLEN J,et al.Pulse oximetry in very low birth weight infants:can oxygen saturation be maintained in the desired range?[J].Journal of Perinatology,2006,26(6):337-341.
[5] GRODINS F S,BUELL J,BART A J.Mathematical analysis and digital simulation of the respiratory control system[J].Journal of Applied Physiology,1967,22(2):260-276.
[6] GREVISSE P,LECOCQ H,DEMEESTER M.A pulmonary model for the automatic control of a ventilator[J].IFAC Proceedings Volumes,1975,8(1):295-302.
[7] C.L.YU.An arterial oxygen saturation controller[D].New York:Rensselaer Polytechnic Institute,1986.
[8] KEIM T,AMJAD R,FALES R.Modelling and feedback control of inspired oxygen for premature infants[C].In Proc.of the ASME Dynamic Systems and Control Conference,Arlington,VA,2011:501-508.
[9] KEIM T,AMJAD R,FALES R.Modeling and control of the oxygen saturation in neonatal infants[C].Dynamic System and Control Conference,Hollywood,California,2009:1-2.
[10]陈荣,邓智泉,严仰光.微分反馈控制在永磁伺服系统中的应用研究[J].电工技术学报,2005,20(9):92-97.
[11]NORMEY-RICO JE.Control of dead-time processes[M].Berlin:Springer Science & Business Media,2007.
[12]王磊.基于抗积分饱和 PID 算法的地暖控制方法研究[J].电子设计工程,2017,25(4):181-184.
[13]KOTHARE M V,CAMPO P J,MORARI M,et al.A unified framework for the study of anti-windup designs[J].Automatica,1994,30(12):1869-1883.
[14]郑国方,朱铭娟,代苗英,等.“滴定调节”早产儿吸入氧浓度方法的临床研究[J].中国当代医药,2013,20(10):36-37.
[15]张应金,陈锦金,黄润忠,等.早产儿视网膜病的高危因素分析[J].中国新生儿科杂志,2014,29(5):329-331.
[16]李书梅,刘娜,徐桂芝,等.早产儿管饲喂养胃内残留影响因素分析与护理[J].河北医药,2013,35(24):3808-3809.
[17]MAGGIO L,COSTA S,ZECCA C,et al.Methods of enteral feeding in preterm infants[J].Early human development,2012,88(2):31-33.
