基于电磁法的河流穿越管道埋深探测技术应用研究
2018-06-13马红莲何仁碧付志强
马红莲 张 勇 黄 辉 何仁碧 付志强
(1.中国特种设备检测研究院 北京 100029)(2. 中国石油化工股份有限公司金陵分公司 南京 210033)
随着国家对油气资源需求的增长,管道建设业蓬勃发展,跨市、省甚至跨国长输管线建设需求迫切,水下管线建设公里数增长迅速。为了从产地、储存库、使用单位间输送商品介质(油、气等),长输管道经常需要跨省、市,穿、跨越(江河、道路等)。“西气东输”工程穿越开都河、黑河、黄河、无定河、汾河、沁河、淮河、茨维新河、长江、秦淮新河、京杭大运河等河流,是我国目前为止距离最长,穿越河流次数最多的输气管道。可见,在长距离油气管道输送中,穿越河流的管道比其他穿越管道的频次高、距离长,是长输油气管道建设中不可避免的一项关键工程,也是长输管道安全的薄弱环节之一。
根据文献资料,从1950年至1974年的24年中,美国穿河管道发生事故的次数虽然只占全部事故次数的3.4%,但从每英里管道发生的事故次数看,穿河管道发生事故的次数比陆地管道多7倍。从美国、前苏联以及我国局部河流穿越事故统计分析知,虽然,水下穿越管道长度占整个长输管道的总长度比例极小,但鉴于穿越管道所处自然条件和所受外力作用的复杂性,监测与维护操作困难,及时发现管道泄漏或断裂不易,其事故发生率却远高于陆地管道的事故发生率。
降低河流穿越管道的事故发生率,需要对穿越管道进行定期检查,美国联邦规定至少每5年就要对河流穿越管线进行一次检测,对于流速快的河流,需采用更高的检测频率[1]。准确探明河流穿越管道的位置和状态是河流穿越管道检测的主要目的。为此,本文基于电磁理论,采用数值模拟的方法,研究了河流穿越管道周围电磁场在空气、水、湿润泥土等不同介质中的分布规律、衰减特征,推导了利用电磁法对水下管道埋深进行检测的算法,并采用基于电磁法的水下管道检测系统ROV对某河流穿越管道进行了埋深检测示范应用。
1 基于电磁法的河流穿越管道埋深探测原理
水下管道埋深探测方法主要有磁法和电磁法探测,此外,也有采用声呐法和地质雷达法的探测技术。作为发展最早、应用时间最长、应用最为广泛的管道检测技术之一,与声呐探测和磁法探测技术相比,电磁法管道检测技术可在水面实现管道的定位和埋深检测,通过激发和接收特定频率的磁场信号,能够抑制干扰,提高检测精度,具有广阔的发展前景。
1.1 电磁法工作原理
电磁法探测的工作原理是利用激励电流源在所需检测管道上施加某特定频率的交变电流,在管道周围形成以管道为中心的交变磁场,电磁波在向外传播过程中被地面上的传感器测得地面的磁感应强度。通过对测得的磁感应强度数值分析计算确定管道的埋深。
利用电磁法探测管道埋深的接收机通常有4个磁场传感器及1个电磁罗盘,4个传感器的分布大致如图1所示。传感器A、B均能够测量水平方向上的磁场信号;传感器C、D能够测量水平及垂直方向上的磁场信号。利用传感器对管道埋深及管道位置探测示意图如图2所示。
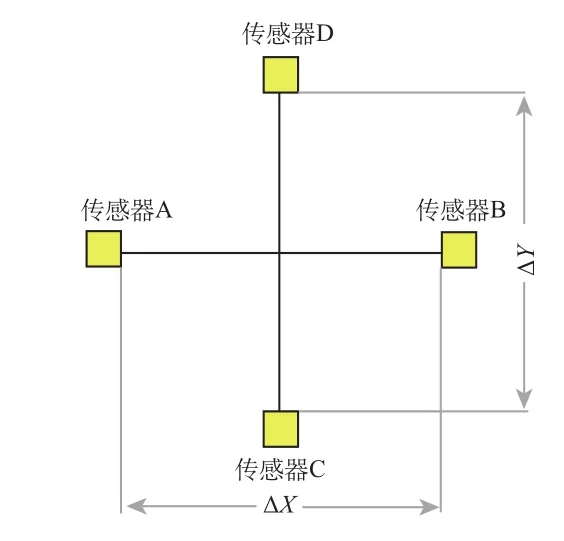
图1 接收机的主要传感器分布
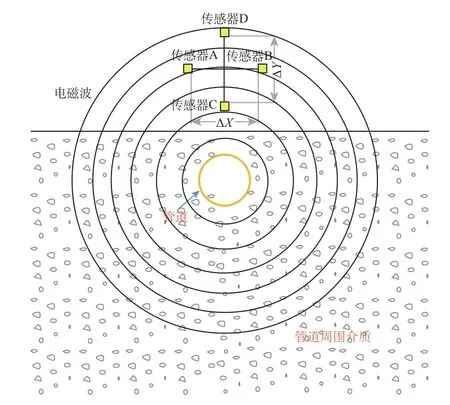
图2 管道探测示意图
1.2 电磁法管道埋深确定
利用接收机上的电磁罗盘可以测得通电管道产生的磁场的方向(管道产生的磁场方向垂直于管道走向),从而可以确定管道走向及接收机与管道产生的磁场方向的夹角θ,如图3所示。其次,利用传感器C、D测得的信号计算管道的埋深h,具体计算如图4管道埋深计算示意图。
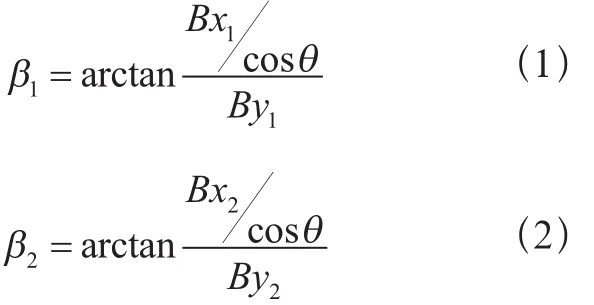
由传感器C测得的水平及垂直方向的磁场信号值可以计算得到传感器C所在位置到管道中心的连线与水平的夹角β1,由传感器D测得的水平及垂直方向的磁场信号值可以计算得到传感器D所在位置到管道中心的连线与水平的夹角β2。
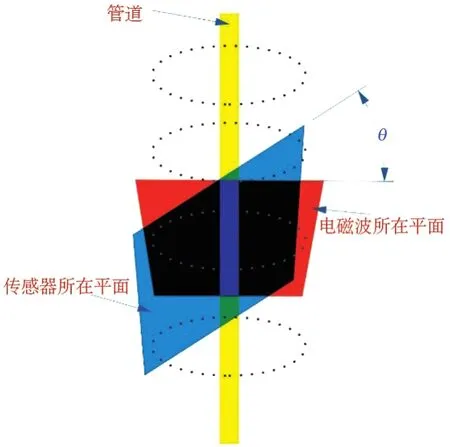
图3 管道磁场与接收机夹角测量示意图
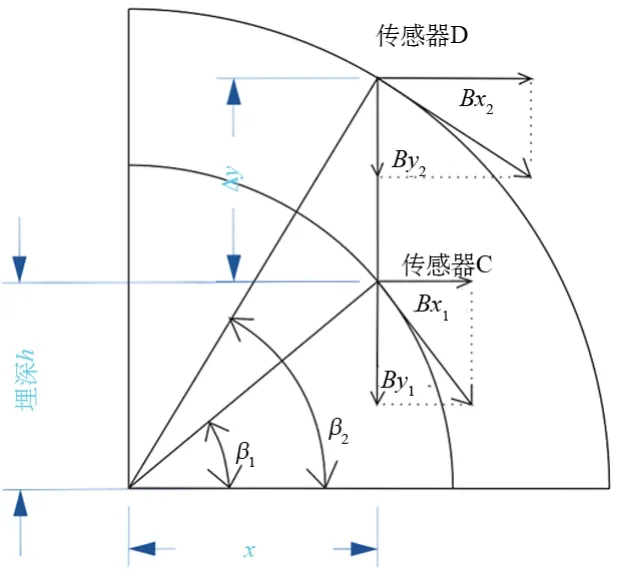
图4 管道埋深计算示意图
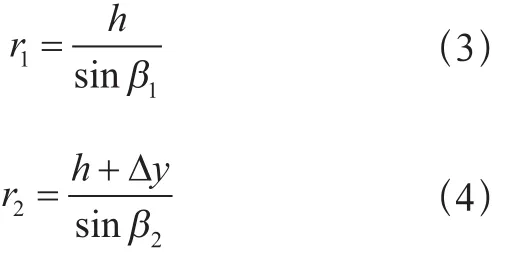
传感器C距管道中心的距离r1及传感器D距管道中心的距离r2为:
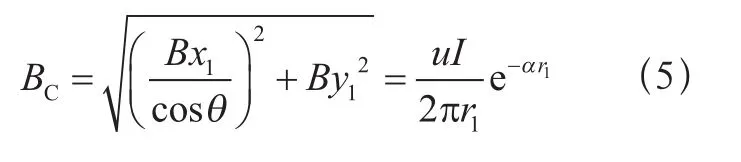
传感器C处的磁感应强度BC为:
传感器D处的磁感应强度BD为:

联立式(5)、式(6)可得:

对式(7)整理后,两边取对数可得:
进一步整理可得:
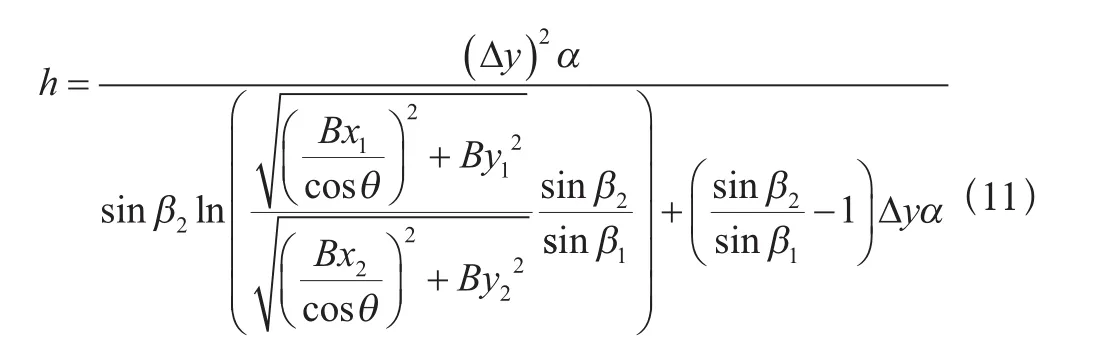
最终推导出管道埋深h的表达式如下:
1.3 管道周围电磁波传播特性
为了直观了解管道周围电磁场的分布特征及电磁波的衰减规律,本文采用数值模拟的方法,将管道分别置于真空、河水以及湿润泥土三种不同的环境中,在管道上通以恒定电流、相同频率的交变电流,研究管道周围的电磁场特征及电磁波的衰减特征,以期为实际检测提供理论指导。
在管道上施加5A、128Hz交变电流条件下,电磁波在空气介质中、河水介质中及湿润泥土介质中的传播衰减结果如图5所示。由结果可知,电磁波在空气中传播衰减最慢,电磁波在水中传播衰减最快。
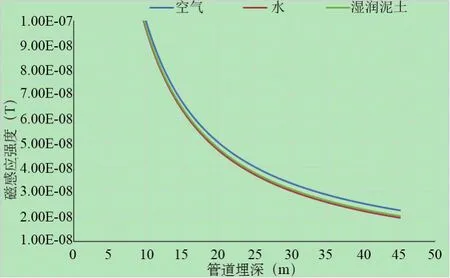
图5 湿润泥土介质中柱面电磁波的衰减曲线
2 河流穿越管道埋深探测方法示范应用[2]
穿越管道的历史事故表明,河床冲淤变化引起水下穿越输油、气管道局部裸露或悬空,是威胁管道安全的主要诱因,结合失效机理的分析不难发现,裸露和悬空管段处会导致管道发生疲劳破坏甚至断裂。可见,管道埋深是评价水下管道安全的一项重要指标。2017年3月,中国特种设备检测研究院对中石化某河流穿越管道开展了River-ROV(Remote Operated Vehicle)水下检测系统管道埋深探测工程应用,图6为ROV水下检测系统。

图6 河流穿越管道水下检测器ROV及其主控系统
首先,检测人员采用DM管道检测仪的发射机通过岸上测试桩对管道施加频率为640Hz、信号强度为2A的交流检测信号。
其次,用运输船将ROV载到预定位置,将调试良好的ROV沿着陆上定位的路径下潜至水底,并近于平行管道的姿势垂直管道路由的方向行进,使用ROV上搭载的电磁法管道定位器将管道位置进行精确的定位。图7和图8分别为ROV水上控制系统和检测现场ROV的下水检测图。

图7 ROV水上控制及调试系统

图8 检测现场ROV下水检测图
最后,当ROV找到管道准确位置后,在该处完成水深、覆土深度以及管道的埋深测量。图9为河流穿越管道埋深检测数据图。
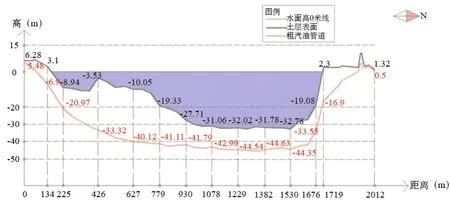
图9 河流穿越管道埋深检测数据图
由此可见,采用电磁法检测技术可以有效在线检测出河流穿越管道的埋深情况,从而进一步判断出管道所处的工作状态,为管道安全运行及维修检测提供数据指导及技术支持。
3 结论和展望
针对河流穿越管道,本文对电磁法管道埋深确定以及不同环境下管道周围电磁波传播特性开展了理论研究,并在此基础上,结合工程实际,采用基于电磁法的ROV设备对某穿江管道的埋深进行了实际工程应用研究。研究发现电磁法埋深检测技术可有效在线检测河流穿越管道的埋深,为管道安全状态提供技术指导,应用前景良好。
针对目前国内水下管道埋深检测需求及存在问题,后续仍需要开展以下方面的研究工作,以促进水下管道埋深检测技术的发展。主要包括:
1)在分析现有水下管道埋深检测技术工作原理的基础上,开展试验研究,明确现有设备进行水下管道埋深检测的精度,拓展现有设备的使用范围;
2)结合理论和试验研究,研制管道埋深检测的原理样机,并逐步开发适用性强便捷的埋深检测设备;
3)收集国内水下穿越管道的穿越河流水文资料和已完成的检测数据,建立水下管道数据库,为水下管道运行、检测及维修等提供数据支持;
4)开展水下管道完整性评价技术的研究工作,建立水下管道检测标准及规范,为水下管道安全运行提供保障。
[1]PHMSA.76 FR 70953 Safety of gas transmission pipelines-Advance notice of proposed rulemaking, extension of comment period[EB/OL]. 2011-11-26[2014-02-11].http://phmsa.dot.gov/pipeline/regs.
[2]金陵石化穿越长江管道水下机器人ROV检测报告[R].北京:中国特种设备检测研究院.