喷气织机织物折入边右剪刀的改进
2018-06-12雒小龙王晓瑞
雒小龙,王晓瑞,宋 英,袁 伟
(陕西长岭纺织机电科技有限公司,陕西 宝鸡 721000)
0 引言
随着喷气织机织物折入边装置的应用推广,配有折入边机构的喷气织机剪刀机构也相应发生了较大变化。目前,国内外主流喷气织机都配有电子剪刀,其多采用旋转磁钢或步进电机驱动,结构简单且剪切时间可通过屏幕设定;但由于旋转磁钢价格昂贵,步进电机又存在失步情况,而且要设计相应的控制电路板,制造及维护成本较高,可靠性较低。通过采用机械结构和通用剪刀片,利用凸轮机构和双摇杆机构原理设计出新型机械式折入边右剪刀机构,降低了制造和维护成本,且调试相对简单、结构可靠性高。
1 织物折入边电子右剪刀结构及工作原理
1.1 电子剪刀研发背景
在喷气织机织造生产的过程中普遍要采用左、右剪刀将织物两端的纬纱剪断,这些被剪断的纬纱暴露在织物外而无法折进开口的经纱中以至成为毛边而影响产品质量、降低织物档次。若喷气织机附带折边器,纬纱剪断后长出的一段将折入下一纬经纱开口中则可不仅使布边紧密牢固、布面平整光洁,而且可节约原料,降低制品的加工成本。
折边装置须在特定角度吹气,才能将已织入织物的纬纱两端折入下一纬中,这就要求纬纱到达后应在特定角度干脆利落地剪断,而电子剪刀由步进电机或旋转磁钢直接驱动,电路控制,结构简单,角度控制灵活且易于调整纬纱剪切时间。
1.2 电子右剪刀结构
电子右剪刀结构如图1所示,其电机座用于固定和调节剪刀相对于织口的前后、高低位置;步进电机用于驱动剪刀动片运动实现剪切;剪刀连接器用于传递步进电机动力到剪刀动片,同时用于调整剪刀片间隙。
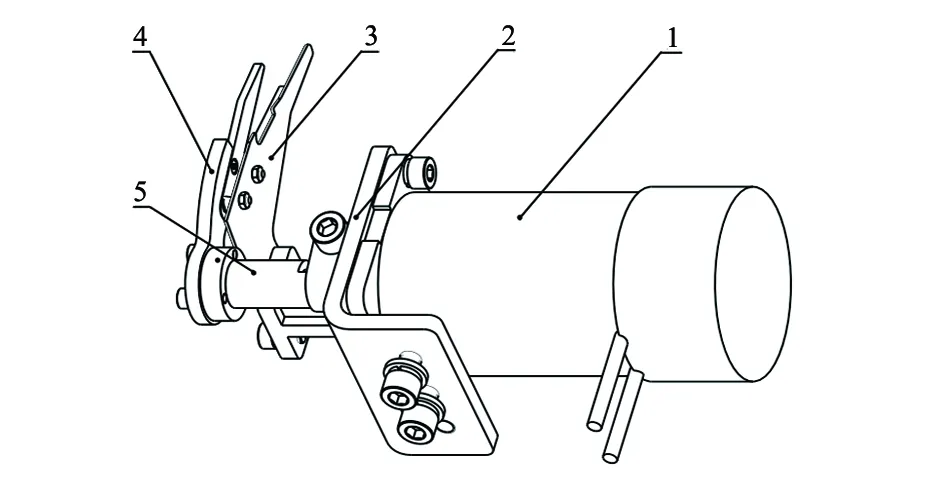
1—步进电机;2—电机座;3—剪刀静片;4—剪刀动片;5—剪刀连接器。图1 电子右剪刀结构
1.3 电子右剪刀工作原理
电子右剪刀主要由控制电路控制,控制电路根据织机角度信号向步进电机驱动器发送控制信号,步进电机驱动器向步进电机发送脉冲信号,在驱动步进电机运转同时带动剪刀运动,实现剪切纬纱。
2 新型织物折入边机械式右剪刀结构及工作原理
2.1 机械式右剪刀结构
机械式右剪刀结构如图2所示,其总体结构与喷气织机废边纱剪刀结构相似,结构改动较少,零件通用性强。
2.2 机械式右剪刀工作原理
机械式右剪刀由两套反向双摇杆机构和凸轮摆杆机构串联组成[1-5],剪刀凸轮固定于开口轴上做旋转运动并驱动摇臂,摇臂另一端由复位弹簧压持以保证滚子与凸轮时刻接触;摇臂、长连杆和摆臂组成反向双摇杆机构一,下摆杆、短连杆和上摆臂组成反向双摇杆机构二,凸轮跟随开口轴以1/2织机转速旋转,驱动两套摇杆机构摆动;凸轮旋转一周中具有两段推程角、回程角和休止角,恰好在织机一周运动中凸轮能够转过一段推程角、回程角和休止角,从而可以保证剪刀机构在一次开口运动中实现打开、闭合和静止。

1—剪刀轴座左;2—剪刀轴;3—下摆臂;4—剪刀轴座中;5—剪刀轴座右;6—摆臂;7—长连杆;8—滚子;9—凸轮;10—摇臂;11—摇臂轴;12—复位弹簧;13—弹簧座;14—短连杆;15—上摆臂;16—剪刀静片;17—剪刀动片;18—剪刀座。图2 机械式右剪刀结构
3 新型织物折入边机械式右剪刀凸轮设计
由于剪刀机构第一套四连杆机构为反向平行四边形机构,根据平行四边形机构只传递运动不改变运动规律的特性[6],对右剪刀机构进行简化的结果如图3所示。

图3 右剪刀机构简图
在直角坐标系xoy中,o1、o2和o3分别为四连杆机构支座和凸轮回转中心。根据空间位置和剪刀工作需要,摆臂的初始角度为α1,终止角度为α2;连杆的初始角度为θ1,终止角度为θ2;摇臂的初始角度为β1,终止角度为β2,摇臂凸轮端的初始角度为φ1,终止角度为φ2;摆臂长度为a,支座和支座中心距离为b;连杆的长度为c,摇臂的长度为d,摇臂的凸轮端长度为e,支座和支座的中心距离为f,摆臂滚子中心与凸轮理论轮廓曲线接触点与支座的距离为g。
3.1 位置分析

(1)
应用欧拉公式eiθ=cosθ+isinθ,将式(1)实部和虚部分离,得:
asinα1+csinθ1=dsinβ1
经整理化简为:
Asinβ1+Bcosβ1+C=0
其中,A=2adsinα1;B=2d(acosα1-b);C=c2-a2-d2-b2+2abcosα1,所以:
(2)
已知a=60 mm,b=384 mm,c=364 mm,d=65 mm,α1=278.5°,α2=289°,代入式(2)计算得:β1=112.8°,β2=103.3°。
3.2 摆杆行程计算
在直角坐标系x2o2y2中,φ1=135°-β1+γ1-γ2,当β1=112.8°,β2=103.3°,γ1=13.9°,γ2=12.6°时,可得φ1=33°,φ2=23.5°。
当摇臂凸轮端的极限角度为φ1时,摆臂滚子中心与凸轮理论轮廓曲线接触点到支座o3的距离为g1;当摇臂凸轮端的极限角度为φ2时,摆臂滚子中心与凸轮理论轮廓曲线接触点到支座o3的距离为g2。由余弦定理:g2=e2+f2-2efcosφ,可知当e=55 mm,f=68.7 mm,φ1=33°,φ2=23.5°时,g1=37.42 mm,g2=28.46 mm。则凸轮升程H为:H=g1-g2=8.96 mm。
当凸轮滚子直径D=32 mm时,暂选凸轮基圆rd=g1-D/2=21.42 mm,经校核凸轮最大压力角为18°,小于许用压力角45°。
3.3 凸轮曲线确定
根据凸轮轴o3和主轴转速关系,剪刀运动规律和摆杆工作属于中低速轻载,选取余弦加速度曲线运动规律完全可以满足运动需要,摆杆行程曲线如图4所示。
4 仿真运动检查剪刀动片运动规律
根据摆杆行程曲线,通过proe可变截面扫描建模[7],生成凸轮三维模型如图5,并按照机构装配关系对剪刀机构进行装配,对机构进行运动仿真、测量剪刀动片的运动规律曲线如图6所示,运动规律符合预期设计。

图4 摆杆行程曲线
图5 凸轮三维模型

图6 剪刀动片角位移曲线
5 结语
通过研究织物折入边右剪刀工作要求和原理,结合织机废边纱剪刀结构,改进剪刀凸轮曲线、剪刀座和剪刀片形式,设计出满足使用要求的机械式织物折入边右剪刀结构,并用proe仿真运动检验剪刀动片运动规律达到预期的设计目标,经试制后应用效果良好。新型织物折入边右剪刀既解决了电子剪刀制造和维修成本高的问题,又大幅提高了剪刀可靠性,且方便喷气织机老机改造。
参考文献:
