港口近岸水田捕捞作业机械无线遥控系统设计
2018-06-06常淑英杨传民
常淑英,杨传民
(1.河北工业大学,天津 300132;2.天津电子信息职业技术学院,天津 300350;3.天津商业大学,天津 300134)
0 引言
由于水田作业条件的恶劣,在近岸水田作业机械的控制系统研究中,无线遥控技术得到了广泛的关注[1-7]。远程控制驾驶水田捕捞机械可以使人脱粒危险的作业环境,改善作业的条件和安全性,降低劳动作业强度,在倡导低碳绿色作业的今天具有重要的现实意义[8-12]。在当前,国内对遥控机械的主要操作方式是采用固定无线频段传输开关量信号进行控制,对于较为复杂和精度要求较高的远程操控是难以完成的[13-15]。而基于单片机和远程控制模块可以通过监测数据的反馈,将反馈数据和初试状态数据进行对比,精准地完成水田捕捞机械的刹车、换挡、油门和转向控制等一系列较难的动作,对农业机械的远程精准控制的研究具有重要现实意义。
1 无线遥控系统总体设计
港口近岸水田捕捞作业机械无线遥控系统总体设计包括机械设备远程监测装置的设计和计算机远程控制系统设计,两方面的通信设计主要是基于WiFi和4G通信技术[16-19]。为了优化通信网络系统,采用了分布式的节点网络布置技术,不仅有效地节省了能耗,还加快了远程信号的传输功能,实现了捕捞机械设备的全方位监测。分布式网络如图1所示。
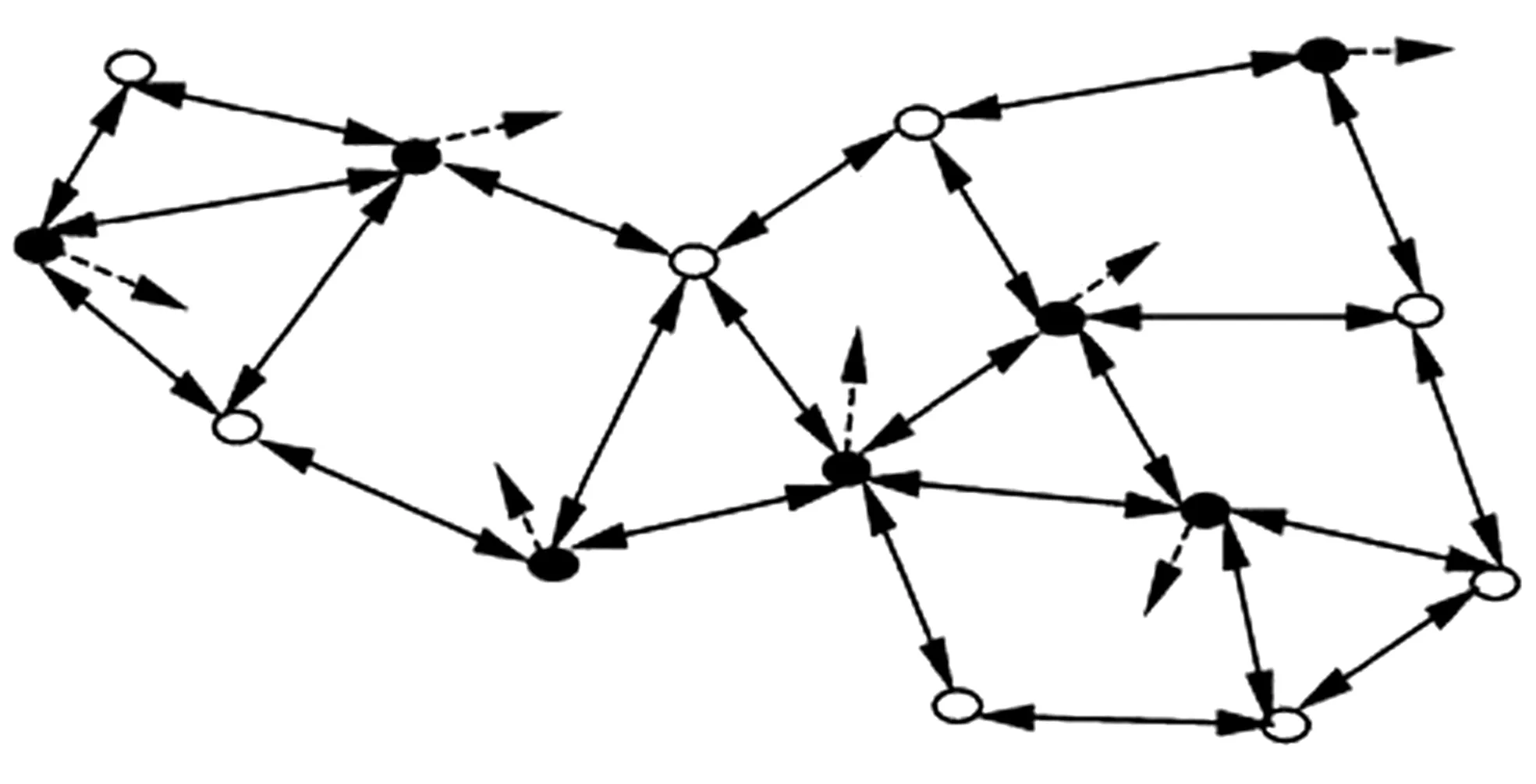
图1 分布式无线传感网络节点示意图
分布式网络的每个节点都可以反馈捕捞作业机型的作业状态,为远程控制反馈状态信号,在实现远程控制时,可以将这些反馈信号与需求状态信号进行匹配,完成远程控制作业。
图2为捕捞作业机型远程控制的基本流程图。监测系统得到的反馈数据和初始的需求状态数据进行比对,当数据特征匹配时,可以输出控制结果;当不满足终止条件时,需要对控制参数进行优化,然后重新比对和特征匹配,最终达到满足条件后结束。
2 遥控监控设备方案和图像处理技术
捕捞机械的远程控制主要基于远程监测技术,远程监测精度的高低直接决定了遥控的精度[20-25]。在进行远程监测时,首先将采集到的图像信号转换为电信号,通过处理器最终得到8位数据,然后采用单片机技术将数据传递给无线发射设备,从而完成信号远程传输的第一步。远程信号发射示意图[26-27]如图3所示。
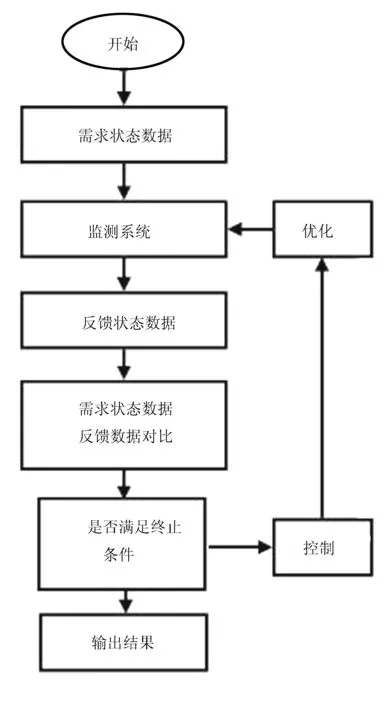
图2 捕捞作业机械远程控制流程图
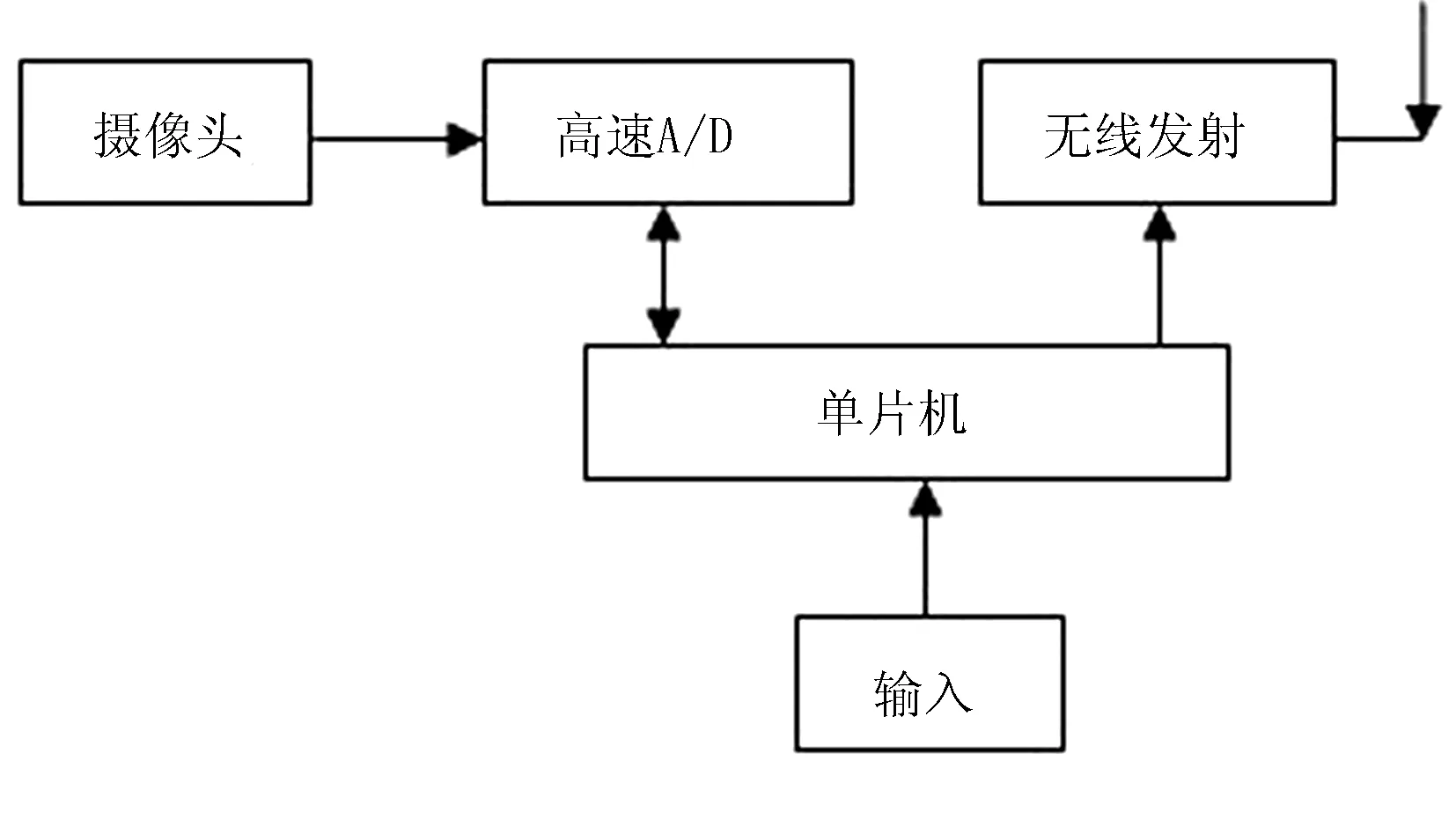
图3 远程信号发射示意图
远程信号发射后需要采用无线接收模块接受发射的信号进行解调,解调后将8位数据信号传递给单片机,单片机开始控制信号的接收,最后将信号传送给PC机进一步处理,发出控制指令,或者直接在显示屏显示信号,如图4所示。
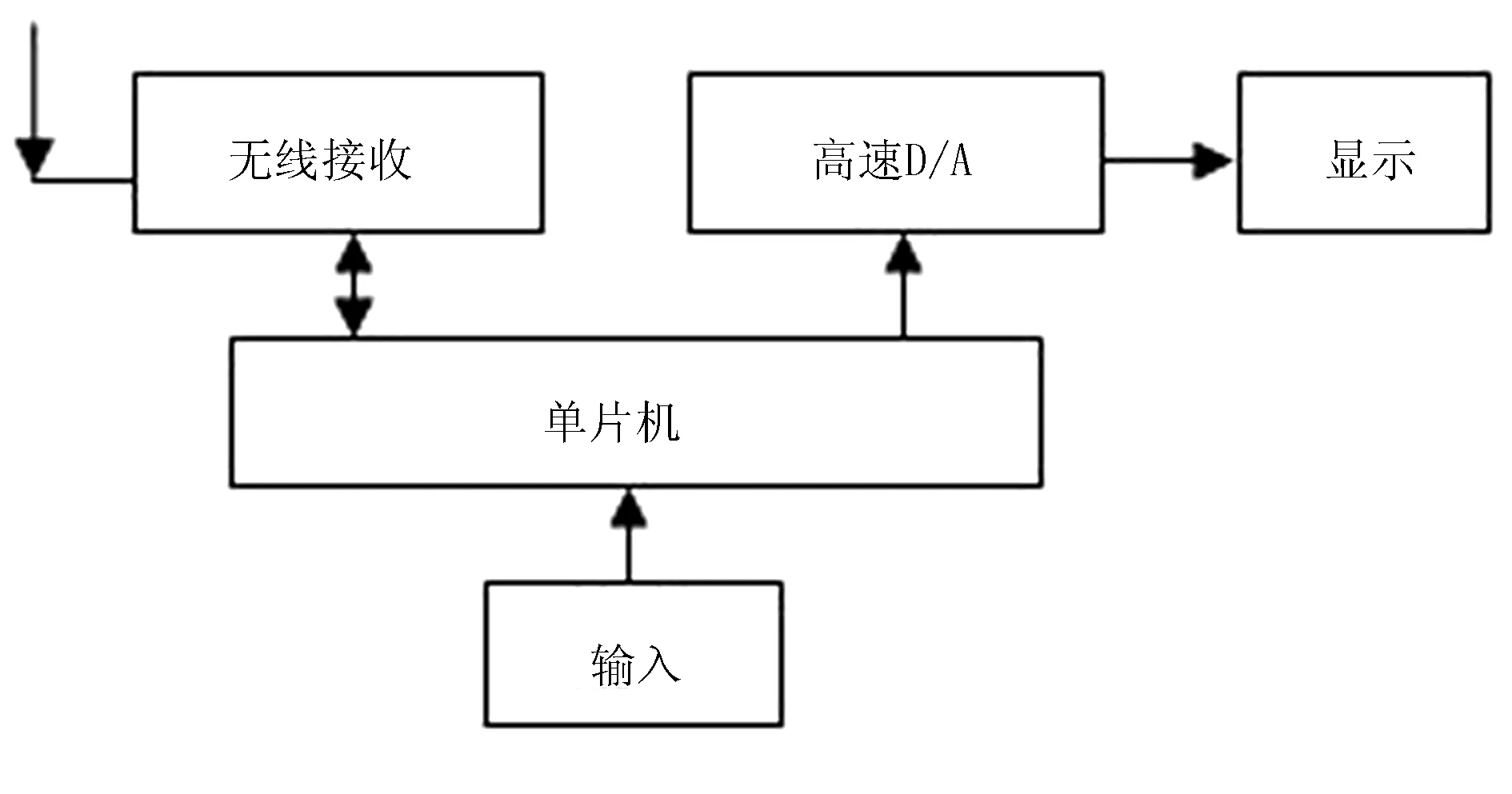
图4 远程信号无线接收示意图
为了全方位地对水田捕捞设备进行监控,实现系统的大数据量的处理功能,采用了云平台处理系统,并方便地使用WiFi无线传感网络,将监控和控制系统安装在Andriod智能手机上。在进行捕捞机械远程监测和控制时,用户可以打开手机实时的观察捕捞机械的作业状态,利用Andriod智能客户端或通过界面操作功能捕捞船进行远程控制,实现捕捞船的无人驾驶功能。wifi模块的框架结构如图5所示。
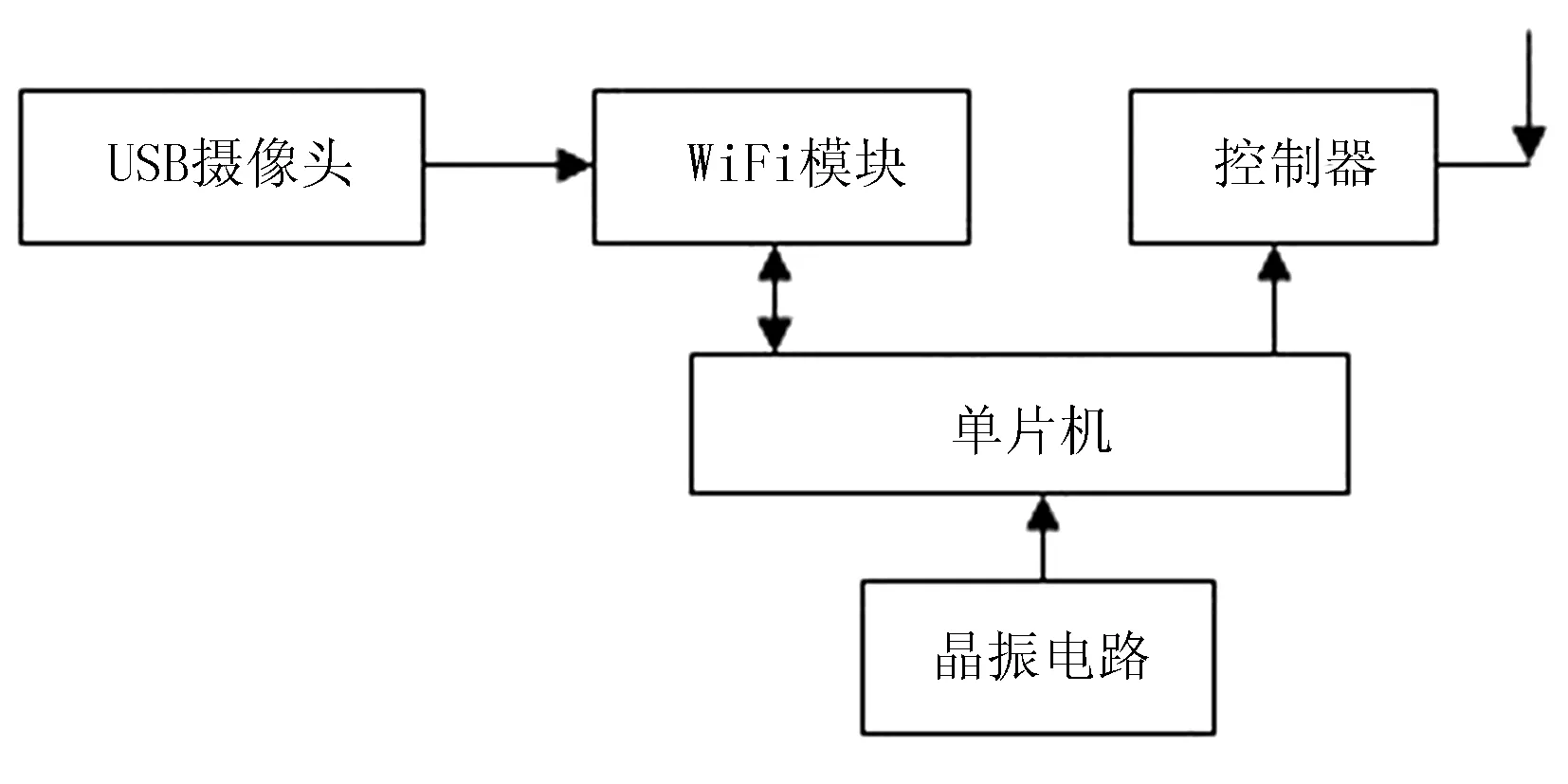
图5 基于WiFi模块的捕捞机械监测控制系统
基于WiFi模块的捕捞机械监测系统的指令转发设备主要由1个摄像头和无线路由器组成。其中,路由器同时具备了4G信号和无线信号一体,并安装有USB接口。为了实现单片机的无线远程控制,对路由器的串口引脚进行了改造,将调试串口TXD和最小系统的RXD接通,这样可以实现将控制指令直接发动到单片机中,对指令做出相应的操作。
在捕捞船进行作业时,受到作业环境的影响,远程监控的图像往往达不到要求,为了进一步提高图像的质量,可以对图像进行增强处理,从而得到更加清晰的远程监控图像。在图像增强时,可以首先将图像进行二值化处理,得到的灰度图像的背景值点为0,前景值点为255;然后,采用细化算法进行二值化,在r×r邻域内,可以通过相邻像素的方差和均值进行二值化处理,其计算公式为
T(x,y)=m(x,y)+k×s(x,y)
(1)
其中,T(x,y)为通过二值化处理后得到的图像像素点;m(x,y)为处理图像的像素点均值;s(x,y)为像素点的标准差;k为图像处理的修正值。假设像素点(i,j)处的灰度值为f(i,j),则
(2)
(3)
通过二值化增强处理后,可以将水田捕捞机械的准确工作状态反馈到监控中心,为了实现水田捕捞机械的远程控制功能,可以将图像的反馈值和需求作业状态图像进行特征匹配。假定正常作业状态的特征图像为
(4)
其中,P0为水田捕捞船正常作业区域的中心位置。采用不变距特征可以实现图像区域的识别,将获得的监控图像在离散状态下求解中心距,从而判断图像是否匹配。在进行计算时,假设离散状态时图像函数为f(m,n),则该图像的p+q阶普通距为
(5)
该图像的p+q阶中心距的计算公式为
(6)
得到中心距后,可以利用图像的旋转、平移和比例变化原理,计算各种监控区域的各种不变矩,达到图像是否配准的判断。
3 无线遥控系统测试
为了验证港口近岸水田捕捞作业机械无线监测和遥控系统的可行性,以实际作业的机械捕捞船为测试对象,利用前端设备和4GLTE无线网,结合WiFi无线传感器,将信号传送到视频监测平台。整个测试平台框架如图6所示。
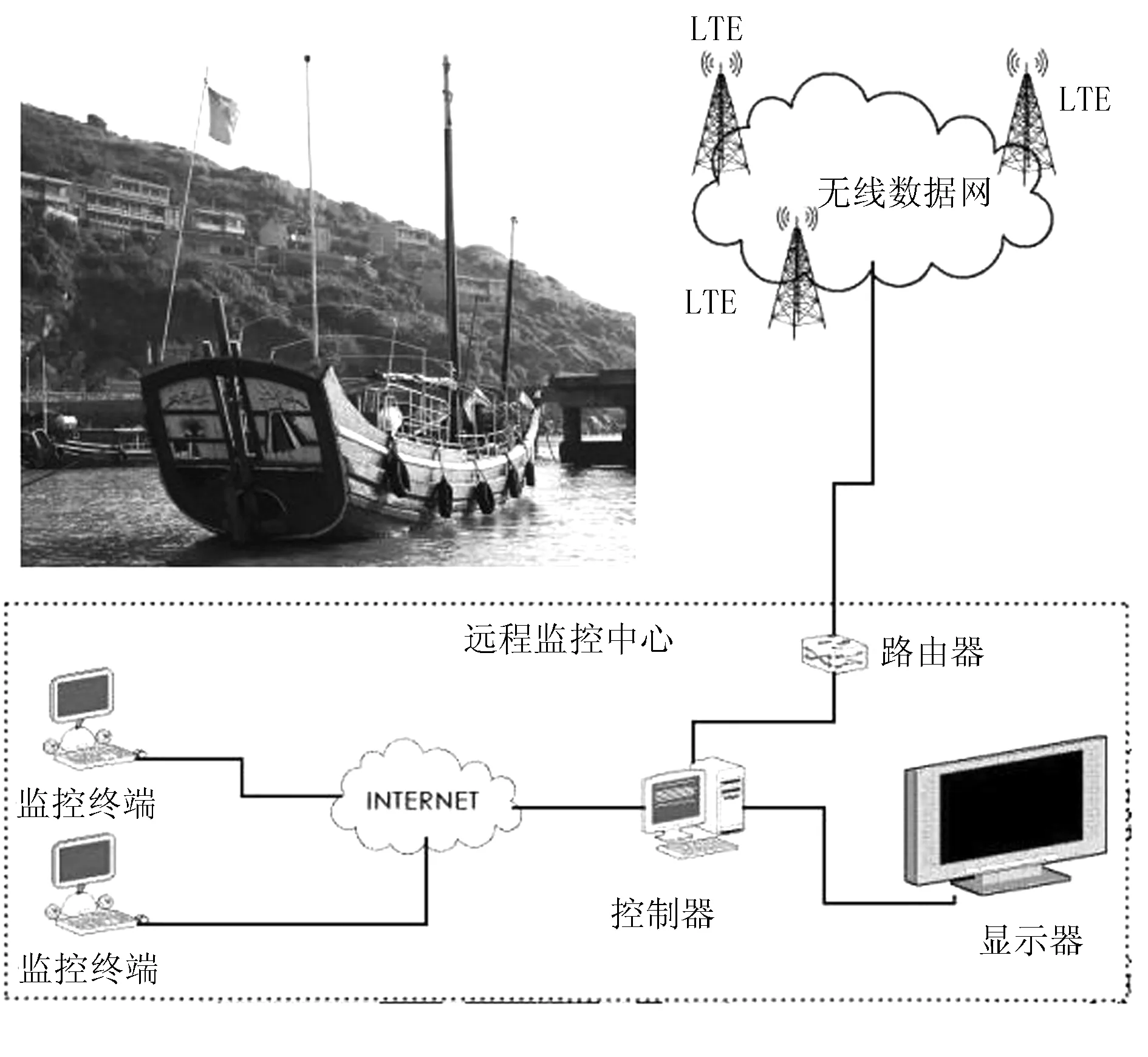
图6 港口近岸水田捕捞作业机械无线遥控系统
整个测试平台主要由前端的设备、路由器、LTE和WiFi无线网、机械捕捞设备组成。为了监测系统使用方便,监测系统供电采用风力辅助发电设备,前端设备如图7所示。

图7 监控前端设备选型
该摄像设备具备了全天的监控功能,白天和晚上都可以对机械捕捞船的作业状态进行清晰的监测。为了使监测设备适应恶劣的作业条件,设备采用了特殊材料制成,可以成功应对水汽、烟雾和各种气体的腐蚀,使监控图像始终保持较高的质量,并具有较好的连续性和可靠性。摄像头外采用防护罩保护,夜间照明采用激光照明设备,使用红外成像仪,使监测设备在夜间可以获得较高的监测视频和图像。
图8为本次采用的水田作业机械捕捞设备采用的无线监控主机设备。该设备支持WiFi无线网络和4G信号传输功能,可以在电脑和手机等终端监测设备实时地查看捕捞机械设备的实时作业情况。为了降低能源耗费,系统除了带有远程开启和关闭功能之外,还具有定位开关功能,可以有效降低设备能源的耗费。

图8 无线监控船载设备主机
表1为对近岸水田捕捞设备的远程监测和遥控设备进行测试得到的测试结果。结果表明:监测设备可以输出稳定的反馈信号,各个串口的通信均正常。对无人驾驶的远程操控误差和控制时延特性进行了统计,结果表明:远程控制的最大误差仅为2.55%,低于5%;控制的最大时间延迟仅为0.72s,小于1s,可以满足水田捕捞作业机械远程控制的基本需求。

表1 无人驾驶遥控精度监测
4 结论
为了使远程监测和控制设备适应港口近岸水田捕捞作业的恶劣作业条件,提出了一种基于无线传感和无人驾驶技术捕捞机械远程监测和控制设备,使用分布式WiFi和4G无线网络实现了远程数据通信,采用图片数据反馈与特征匹配和单片机实现了远程控制功能。为了验证系统的可行性和可靠性,在较大距离范围内对监测设备的性能进行了测试,分为监测通信测试和远程无人驾驶操控精度测试。结果表明:系统可以输出连续可靠的通信信号作为控制反馈的指令。远程控制误差实验结果表明:系统远程控制的误差低于5%,控制的最大时间延迟小于1s,在远程高精度监测和控制运行的误差范围内满足了设备高精度作业的需求。
参考文献:
[1] 孙立新.关于电梯能效评价的探讨[J].中国电梯,2008,19(4):43-45.
[2] 王士琴,朱昌明,张鹏,等.电梯能耗测量新方法[J].起重运输机械,2009(9) : 35-39.
[3] 刘传玉,郭强.论现代农业的发展趋势[J].江苏农业科学,2014,42(4):436-438.
[4] 吕鑫,王忠.Zig Bee 无线数据传输模块的设计与实现[J].安徽师范大学学报:自然科学版,2010, 33(4):332- 335.
[5] 尹嘉鹏,徐志祥. 针对少实时任务应用的嵌入式Linux改进[J].计算机工程,2013, 39(10) : 49-52.
[6] 董士海.人机交互的进展及面临的挑战[J].计算机辅助设计与图形学学报,2004,16(1):1-11.
[7] 刘文霞,王树杰,张继伟.虚拟现实技术在医学上的应用[J].生物医学工程学杂志,2007,24(4):946-949.
[8] 魏欣,林叶春,鲍敏中.基于In Touch平台集装箱装卸桥监控系统的开发[J].工业控制计算机,2004, 17(3):32-33.
[9] 张明江,杜明,修云,等.港口设备远程监控系统构建研究[J].港口装卸,2006(4):19-21.
[10] 詹炜,戴光明.数据可视化程序开发包Open Inventor及其应用[J].计算机工程与设计,2007,28 (11):2705-2707.
[11] 张杰,杜宝江,刘荣辉.基于VR的MMD850轮齿式破碎机监控模型设计[J].精密制造与自动化,2006, 167(3):49-50
[12] 张清华,董晓盛,张吉军,等.气吸式水稻钵育秧盘精量播种机的设计[J].机电产品开发与创新,2004,17(3):36- 38.
[13] 邱兵,张建军,陈忠慧.气吸振动式秧盘精播机振动部件的改进设计[J].农机化研究,2002(2):66-67.
[14] 邱兵,张建军,陈忠慧.水稻穴盘精播机气力吸种部件防堵装置[J].农业工程学报,2003,19(5): 175-176.
[15] 盛江源,田宏炜,高玉林,等.吸盘式排种器几个基本参数的试驻研究[J].农业机械学报,1989(3):102- 104.
[16] 宋裕民,胡敦俊.工厂化育苗精量播种装置的试验研究[J].山东工程学院学报,2002,16(3):48-52.
[17] 周晓峰,胡敦俊.穴盘育苗气吸式精量排种器的吸附性能[J].山东理工大学学报,2004,18(2):37-41.
[18] 郑丁科,李志伟.水稻育秧软塑穴盘播种设备研究[J].农机化研究,2002(4):42- 45.
[19] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
[20] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农业工程,2013,3(6):10-13.
[21] 吴岩,杜立宇,高明和,等.农业面源污染现状及其防治措施[J].农业环境与发展,2011(1):64-67.
[22] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012, 43(3):163-167.
[23] 胡伟,徐福缘.基于改进粒子群算法的PID控制器参数自整定[J].计算机应用研究,2012,29(5): 1791-1794.
[24] 徐雄伟,王平,徐世武.无线传感器网络同步算法的研究与探讨[J].单片机与嵌入式系统应用,2012, 12(3):8-11.
[25] 司海飞,杨忠,王珺.无线传感器网络研究现状与应用[J].机电工程,2011,28(1):16-20.
[26] 薛明,高德民.无线传感器网络最大生命期聚合树路由算法[J].传感器与微系统,2014,33(1):130- 133.
[27] 崔素辉,陈光亭,李茹雪.三维无线传感器网络的中继器放置问题[J].杭州电子科技大学学报,2010, 30(2):81-84.
AbstractID:1003-188X(2018)06-0224-EA
Abstract: The environment of fishing operations in coastal inshore paddy field is often poor, and it is difficult to monitor the mechanical fishing equipment due to the influence of fog, wind and temperature. For the high precision remote control operation to achieve the field working machine, it proposes a wireless network monitoring and image enhancement technology based on distributed wireless sensor, which can effectively improve the coastal paddy field operation equipment monitoring accuracy and efficiency monitoring. The wireless data transceiver module and data acquisition and processing module, and wireless communication protocol, it designs a wireless remote control fishing equipment SCM and WiFi system based on the coastal paddy field, and in the range of 1000m the feasibility and precision of the device was tested by the test results show that the monitoring and control system of serial communication, wireless data transmission stability, control accuracy to meet the basic needs of paddy field fishing machinery.
Keywords: fishing machine; paddy field operation; port inshore; single chip computer
