采摘机器人定位和导航研究
——基于足球比赛动态路径规划
2018-06-06张磊
张 磊
(河南财政金融学院,郑州 450046)
0 引言
随着控制技术的快速发展,智能机器人的应用越来越广泛,而采摘机器人是机器人是机器人技术在农业中的应用和创新,集成了机械、电子、信息、传感器技术和人工智能等技术。本文研究的采摘机器人主要用于现代化果树种植基地的果实采摘,可减少劳动力,提高农业生产效率。本文将足球机器人比赛动态路径规划系统应用于采摘机器人,结合采摘机器人应用特性,设计了采摘机器人智能智能定位和导航系统,并验证了该系统的有效性和可行性。
1 足球比赛行为的路径规划
足球比赛行为的路径规划是指机器人在不碰撞障碍物的情况下成功完成任务的功能模块,其一般遵循“信息采集→命令决策→智能控制”模式。首先,利用多种传感器采集数据信息,判断行为是否触发;然后,结合当前系统任务决策规划实时运动控制;最后,控制机器人进行相应动作。一般而言,机器人的行为设计依赖于需要处理的任务及作业环境的复杂程度。
1.1 足球比赛行为分析
行为是形容高等动物生活形式的名词,是指在独有的外围环境中,在脑电波自主控制的情况下,习惯性地去处理特定功能任务的一种活动。其产生机理如图1所示。
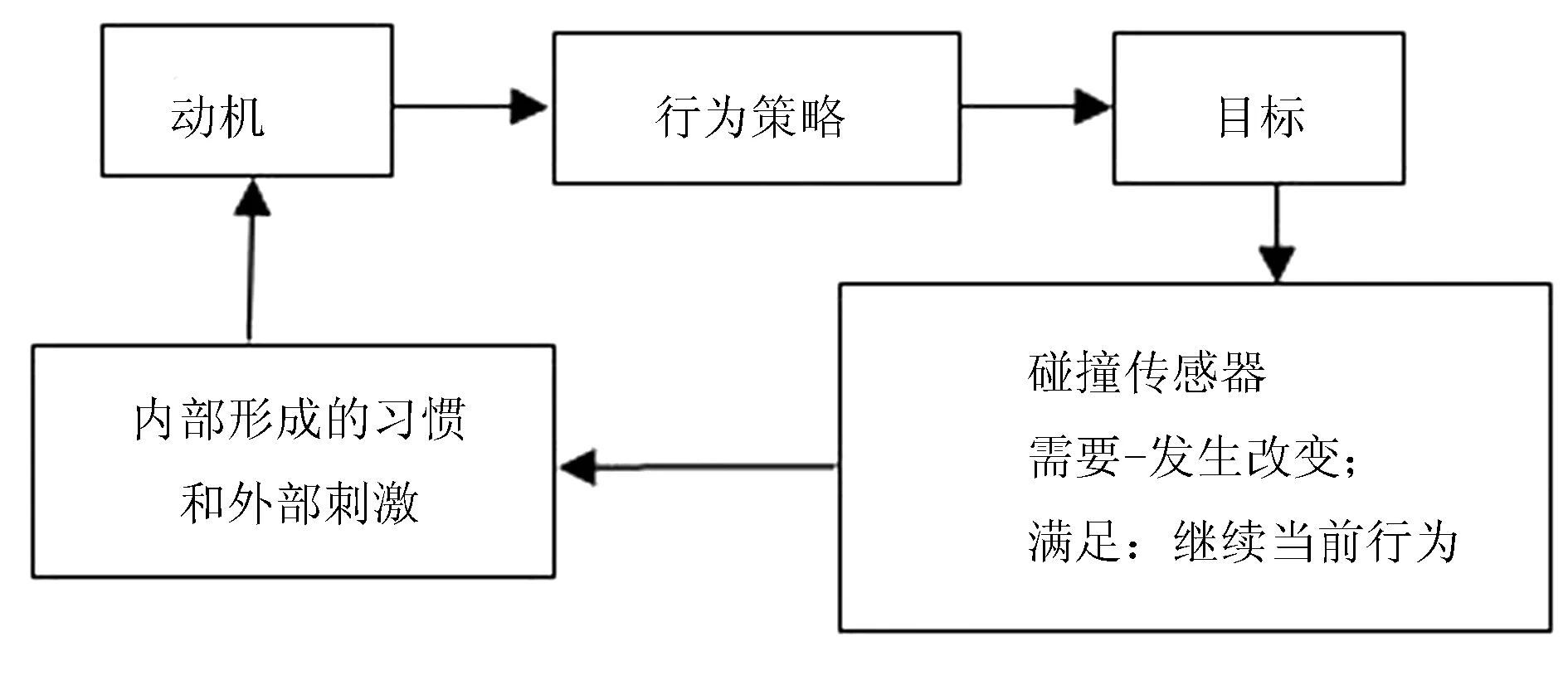
图1 行为产生机理
人的行为产生过程如下:当一个人的某种需要对于当前目标而言没有得到满足时,就是想着是否需要改变,当此时收到外部条件刺激时,就根据大脑内部形成的习惯去处理动机;有了动机的驱使,就会根据行为策略进行一系列的行为去到达目的;当实现目标时,原先产生的需求就会暂时得到满足,然后在一定时间内继续当前行为。一段时间之后,新的需求和刺激又会来临,然后进行新一轮的动机到实现目标等一系列的行为,并不断循环往复下去。
足球机器人会和人一样按照一定策略执行动作,是因为其被内置程序固化,在复杂环境下根据内部指令执行相应策略。其主要由三要素构成:
1)机器人内部固化程序,即设定好的目标任务;
2)机器人硬件平台;
3)复杂环境因素。
也就是说,行为是足球机器人在“自身一目标任务一复杂环境”三方面进行的一系列交互作用。
1.2 足球比赛行为的导航控制
足球机器人比赛行为导航是将导航功能进行细分为多个简单模块,然后各模块根据特定传感器和执行器进行操作,在不同环境下,联合执行各项复杂任务。足球机器人比赛行为导航框架如图2所示。
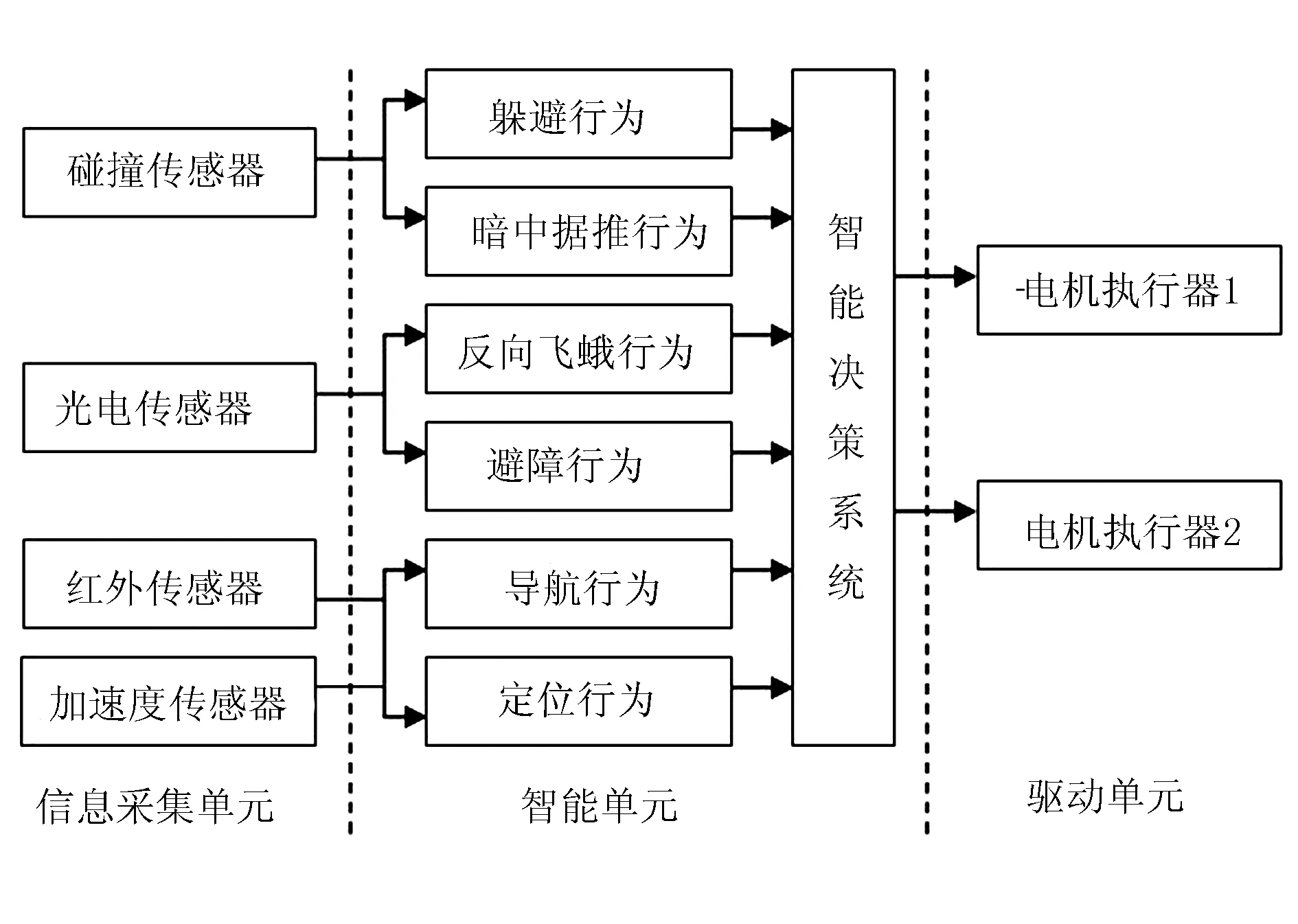
图2 行为导航框架图
足球机器人比赛行为导航控制系统包括信息采集、智能控制和驱动3个单元。信息采集单元由碰撞传感器、光电传感器、红外传感器和加速度传感器组成,主要负责采集周边环境信息,为后级智能单元提供信息输入;智能单元由躲避、暗中据推、反向飞蛾、避障、导航、定位等6个行为及智能决策系统组成,主要负责根据前端采集到的信息进行仲裁,给后级驱动单元输出命令;驱动单元由电机执行器1和电机执行器2组成,负责机器人的前进、后退、左转向和右转向驱动。
1.3 足球比赛避障行为原理
足球比赛机器人在行进过程中由于处于动态环境下,往往会有友方机器人或者对方机器人挡在前方,因此对障碍物的运动预测很重要,其必须具备避障功能。当人看见障碍物,若是人时,可以说声“麻烦让一下,谢谢!”;若是其他不可移动的障碍物,可以自己主动绕开。人可以主动识别障碍物,但是足球比赛机器人只能依靠传感器进行识别。足球比赛机器人避障数学建模示意如图3所示。
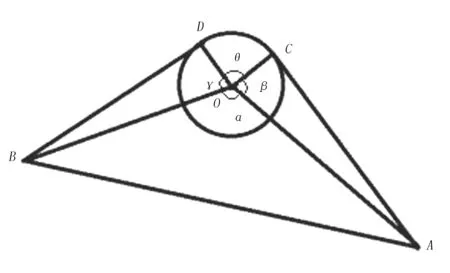
图3 避障数学建模示意图
假设A(x1,y1)为机器人当前位置,B(x2,y2)为目的地,C(x3,y3)和D(x4,y4)避开障碍物圆心O需要经过的圆弧路径,若要使得路径最优,则∠DOC值应该最小,则
(1)
在△AOB中,有
(2)
在△AOC中,有
(3)
在△BOD中,有
(4)
由θ=2π-α-β-γ,求解∠DEC,即可得到足球机器人避障障碍物的最佳路径。足球比赛机器人避障流程包含以下6个步骤:
1)对环境及足球机器人信息进行初始化操作;
2)进行空间障碍物数学建模;
3)传感单元采集周边环境信息;
4)发现障碍物,搜索最优避障路径;
5)细化和光滑避障路径;
6)驱动单元驱动电机躲避障碍物。
2 采摘机器人智能控制系统
采摘机器人控制系统由机器视觉、决策、无线通信和多智能体构成,在整个作业过程中,视觉控制系统通过摄像头对果园环境信息进行采集,由决策进行判断,然后通过无线通信系统给车体系统发出指令,机器人接收信息,并进行操作。
2.1 智能控制系统整体设计
本文所研究的采摘机器人智能控制系统,需要对前进、后退、左转向和右转向多个电机进行驱动,还需对多路传器进行信息采集,外围接口比较多,电路设计复杂,因此采用SAMSUNG公司的嵌入式芯片Exynos4412作为核心处理器。该芯片支持片上系统,可以根据需求对源代码进行裁剪,具有操作简单、系统灵活和开发容易等优势。智能控制系统框架如图4所示。
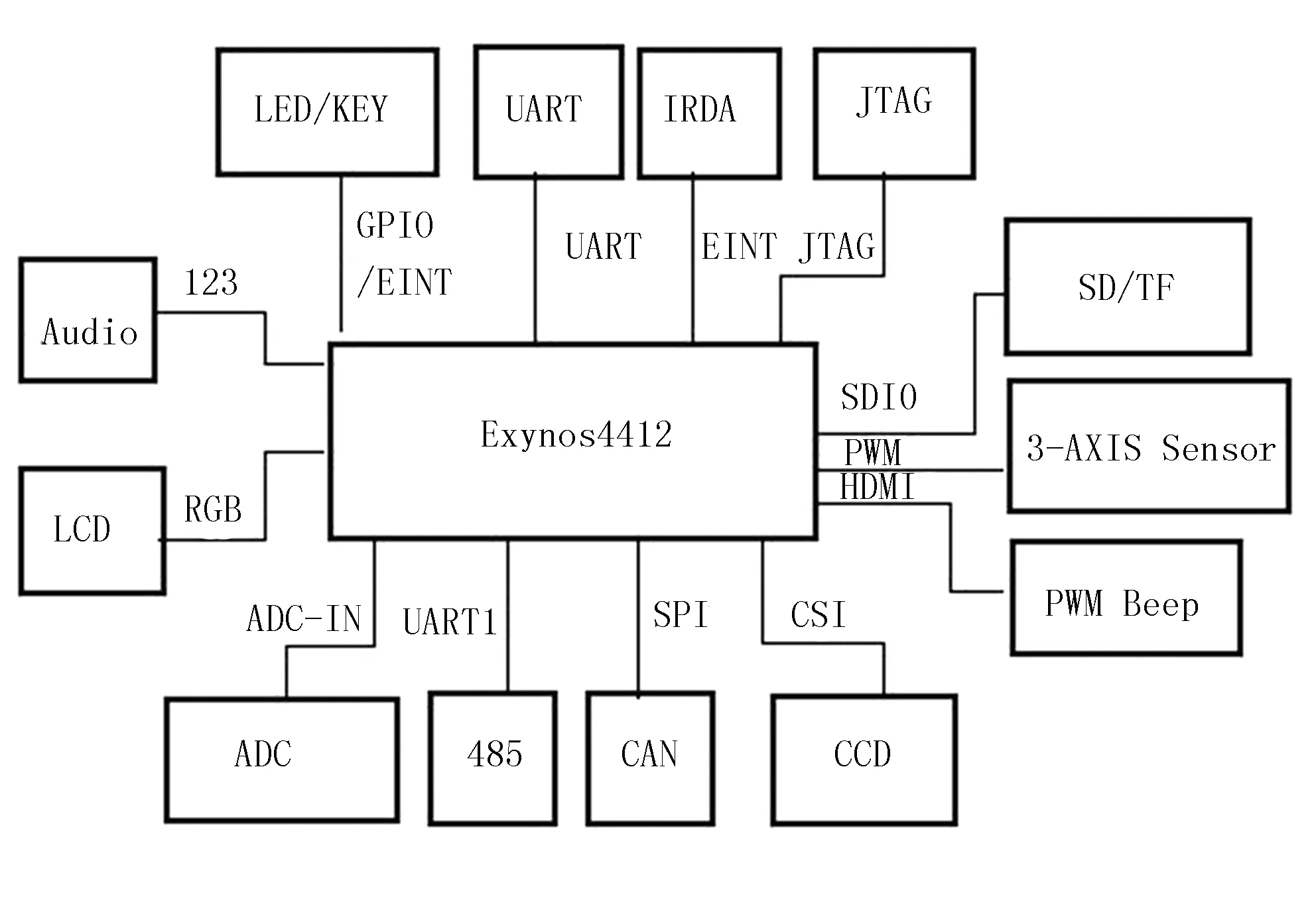
图4 智能控制系统框架图
2.2 智能控制系统视觉子系统
机器视觉作为整个系统最为核心的传感检测设备,其作用与动物眼睛一样,是不具备视觉的采摘机器人根据CCD摄像图对环境和果实做出准确采集,然后发送给决策系统,为其分析处理提供原始数据。视觉子系统处理流程如图5所示。
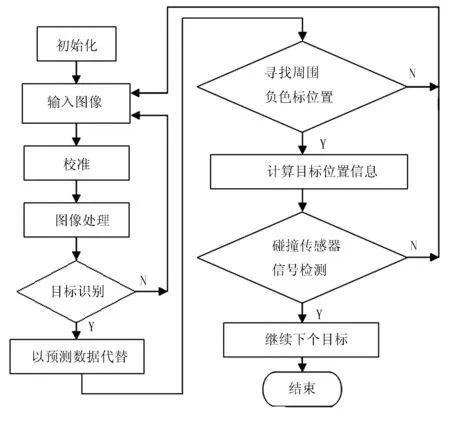
图5 视觉子系统处理流程图
2.3 智能控制系统决策子系统
智能控制系统决策子系统根据前级采集到的信息,利用多智能协作和决策原理,对采摘机器人行动进行判断和决策,精确控制机器人的行为,保证避障顺利和无损害摘取果实。决策子系统是采摘机器人控制系统的核心子系统,是多智能协作理论研究的基础。决策子系统控制示意如图6所示。
决策子系统根据前级系统采集到的全方位视觉信息,对果实信息、周边环境及障碍物位置进行计算,然后根据决策模型对采摘路径进行合理的规划,并通过通讯子系统将信息发送给驱动单元。
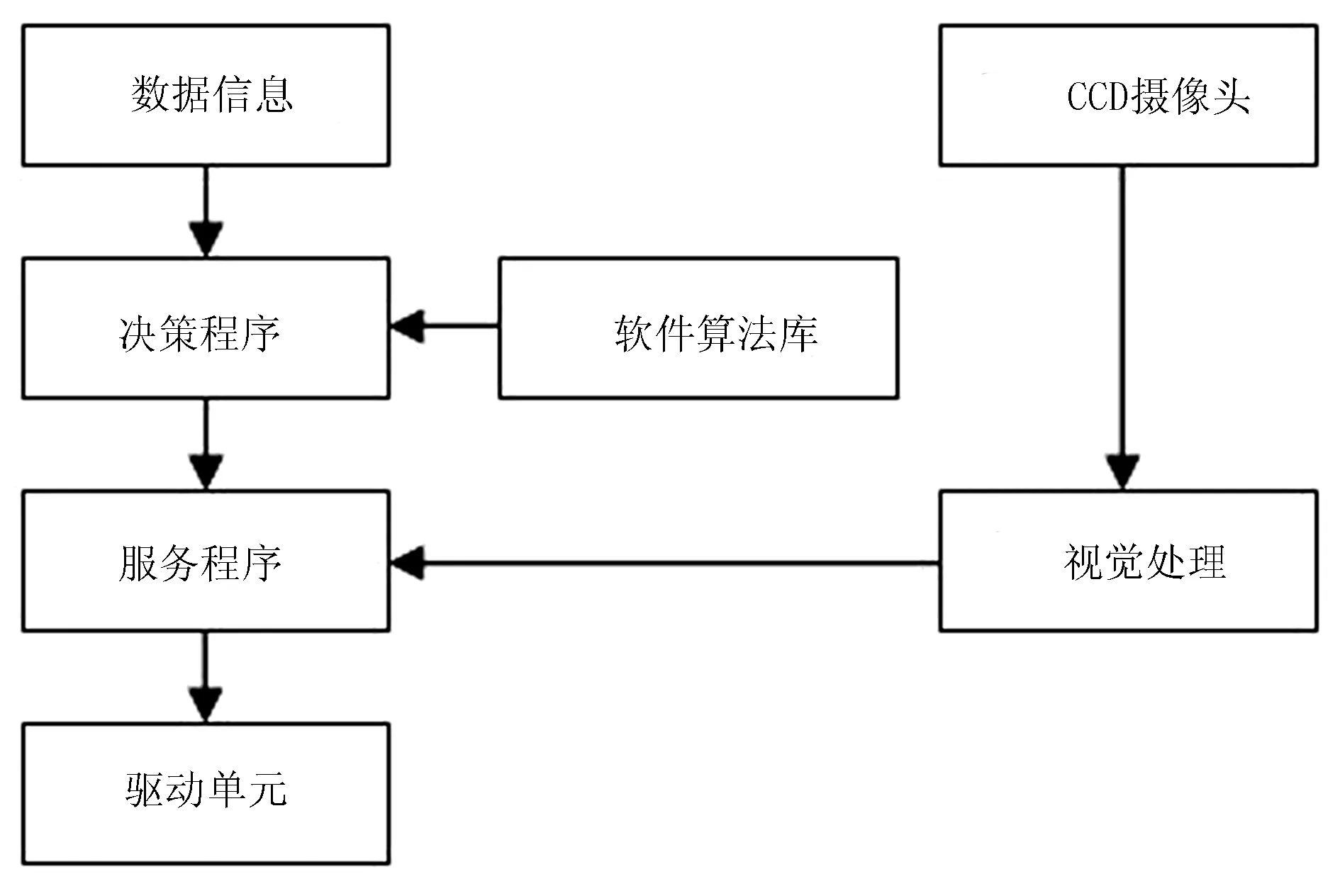
图6 决策子系统控制示意图
2.4 智能控制系统通讯子系统
通讯子系统完成后台服务器和机器人以及机器人控制系统与决策子系统、视觉子系统之间的信息交换,主要包括数据信息和通信方式。通讯子系统处理框架如图7所示。
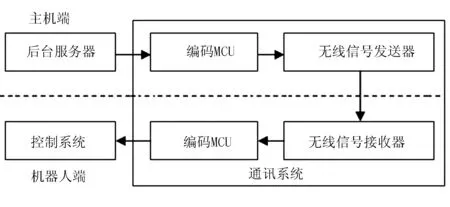
图7 通讯子系统处理框架图
3 采摘机器人定位和导航研究
3.1 建立WSN环境平台
为了让采摘机器人在定位和导航中行动更加敏捷,特建立无线无线传感器网络(WSN)环境平台。通过该平台,可以实现机器人与周边环境节点进行信息交互,从而使自身的定位更加准确。机器人机身安装阅读器,信标节点分布在作业区域,机器人节点通过对环境的信标节点进行读取,全方位了解全局环境信息。WSN平台框架如图8所示。
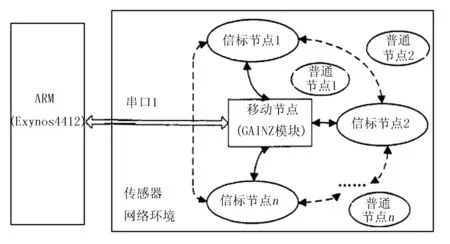
图8 WSN平台框架图
3.2 控制系统软硬件设计
3.2.1 控制系统硬件设计
硬件设计是采摘机器人控制系统的核心,该部分能够实现信息采集、处理,以及控制机器人的移动和采摘状态的实时显示,主要包括RIFD阅读器、GAINZ、JTAG、复位电路、时钟电路、驱动电路、电子罗盘、运动控制、碰撞开关、人机界面、JTAG和各类传感器等电路或模块。控制系统硬件框架如图9所示。
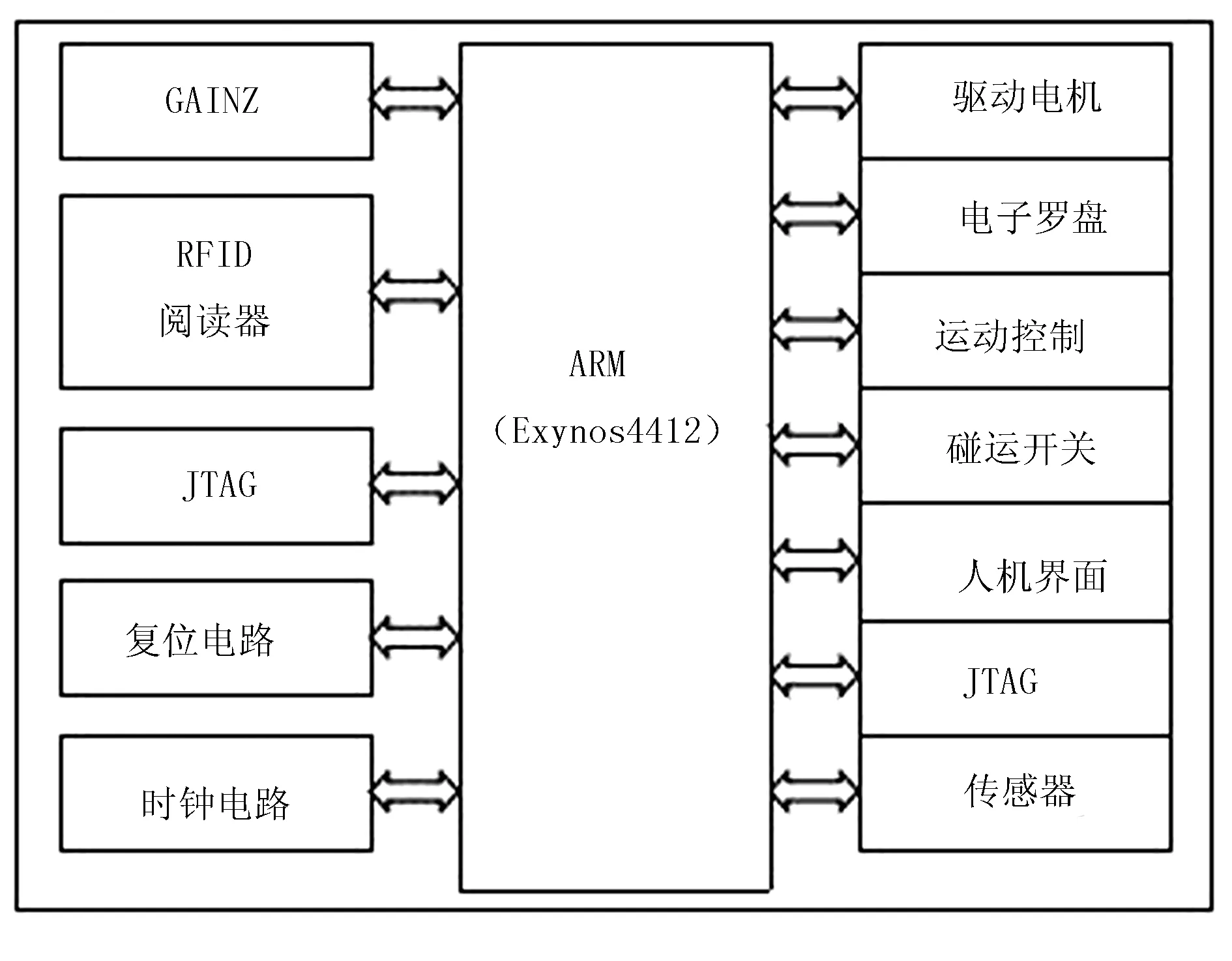
图9 控制系统硬件框架图
3.2.2 自主定位和导航程序设计
自主定位和导航控制软件系统包括应用软件、内核、系统服务、驱动及重力加速度程序。其中,重力加速度的程序如下
void MPU6050_Init (void)
{
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18#define ACCEL_CONFIG 0x1C //加速计自检、测量,典型值:0x01
#define ACCEL_XOUT_H 0x3B
REG_WRITE(GPX1PUD,REG_READ(GPX1PUD) & (~(0x3 << 2)));
REG_WRITE(GPX1CON,REG_READ(GPX1CON) & ~(0xf << 4) | (0xf << 4));
REG_WRITE(EXT_INT41_CON,REG_READ(EXT_INT41_CON) & ~(0x7 << 4) | (0x2 << 4));
REG_WRITE(EXT_INT41_MASK,REG_READ(EXT_INT41_MASK) & (~(0x1 << 1)));
REG_WRITE(ICDDCR,1);
REG_WRITE(ICDISER1_CPU0,REG_READ(ICDISER1_CPU0) & (~(0x1 << 25)) | (1<<25));
REG_WRITE(ICDIPTR14_CPU0,REG_READ(ICDIPTR14_CPU0) & (~(0xff << 8)) | (1<<8));
i2c5_init();
uart2_init();
MPU6050_Init();
mydelay_ms(100);
return ;
}
4 试验结果与分析
为了验证该机器人定位和导航系统是否能够满足设计需要,本文对所设计的控制系统进行MATLAB 5.0进行仿真试验,结果如图10所示。
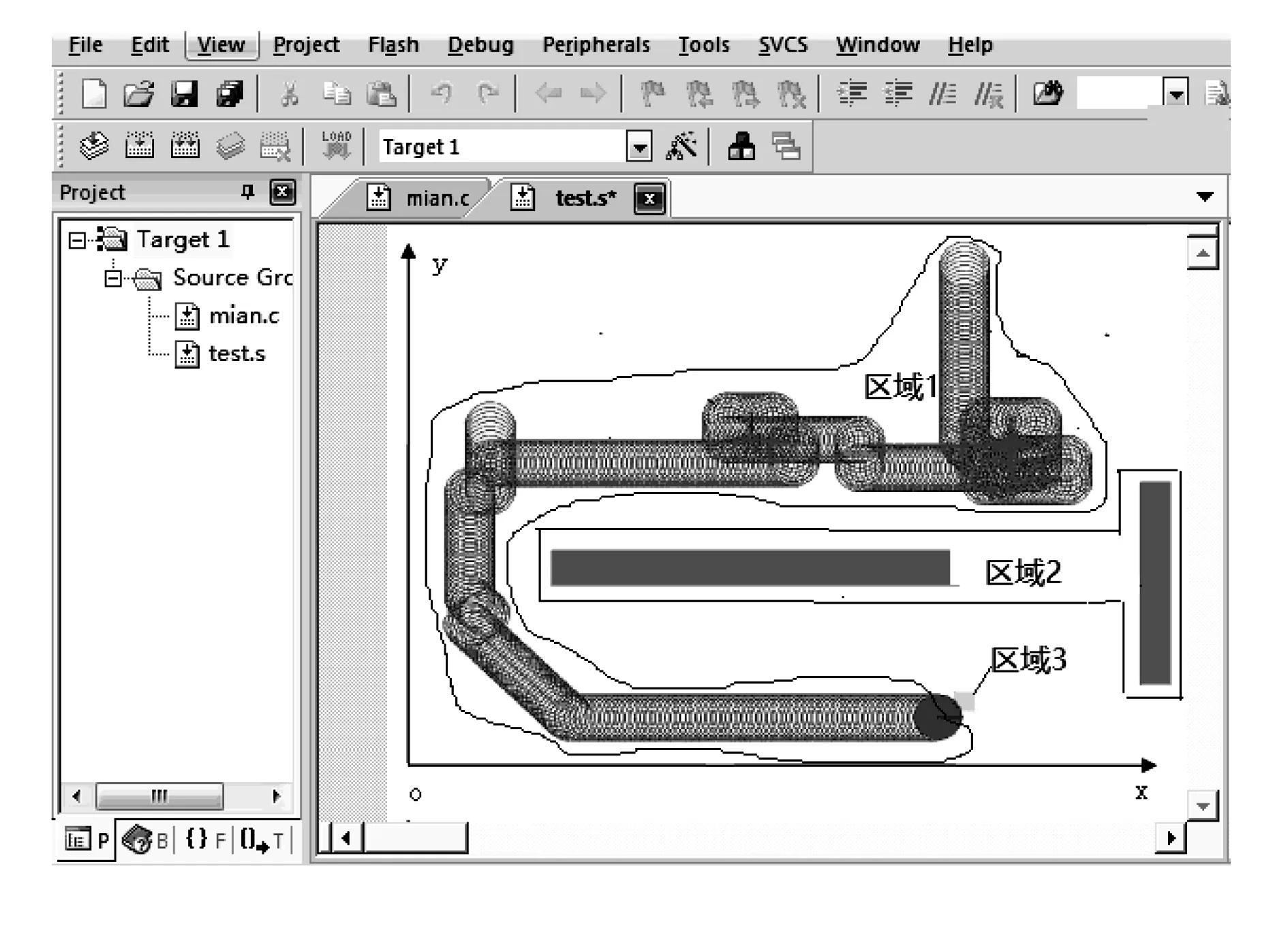
图10 仿真结果图
图10中,区域1代表的是机器人运动轨迹;区域3为目标终点;区域2代表障碍物。可以看出:系统可以实现实时定位和导航,且路径规划路线最优,在整个过程没有发生碰撞行为,实现了成功达到终点的目的,证明了该定位和导航系统的有效性和可行性。
5 结论
针对采摘机器人在作业过程中行走路线过长、路径规划不适用等问题,本文将足球机器人比赛动态路径规划系统应用于采摘机器人上,大大加强了其对环境的感知、决策和适应能力,并利用MatLab 5.0进行路径优化仿真验证。试验证明:系统可以实现实时定位和导航,且路径规划路线最优,在整个过程没有发生碰撞行为,实现了成功达到终点的目的,证明了该定位和导航系统的有效性和可行性。
参考文献:
[1] 罗陆锋,邹湘军,程堂灿,等.采摘机器人视觉定位及行为控制的硬件在环虚拟试验系统设计[J].农业工程学报,2017(4):39-46.
[2] 叶敏,邹湘军,罗陆锋,等.荔枝采摘机器人双目视觉的动态定位误差分析[J].农业工程学报,2016(5):50-56.
[3] 康倩.基于免疫机理的足球机器人协作控制研究[D].西安:西安科技大学,2015.
[4] 许晓龙.基于局部环境信息的移动机器人动态避障研究[D].沈阳:沈阳工业大学,2015.
[5] 刘祚时,王亚平,吴翠琴. 脐橙采摘机器人快速视觉定位系统研究[J].江西理工大学学报,2014(3):68-72.
[6] 安方方.RoboCup小型足球机器人通信与决策系统的设计与实现[D].西安:长安大学,2014.
[7] 苏金文.基于组合策略的自主机器人定位技术研究[D].焦作:河南理工大学,2012.
[8] 张昊,罗文广,臧庆凯.基于动态规划算法的机器人避障路径研究[J].广西工学院学报,2011(4):35-39.
[9] 李艳丽.基于遗传算法的多足球机器人路径规划[D].青岛:中国海洋大学,2011.
[10] 柳在鑫,王进戈,王强,等.基于微型足球机器人系统的研究[J].西华大学学报:自然科学版,2009(4):11-15.
[11] 袁于程. RoboCup中型组足球机器人全景视觉系统的研究[D].苏州:苏州大学,2009.
[12] 文俊.全方位移动机器人设计与运动控制[D].青岛:中国石油大学,2009.
[13] 王文山.基于CAN总线的农业机器人平台控制系统的设计与实现[D].泰安:山东农业大学,2012.
[14] 陈杰.对机器人足球的决策与路径规划的研究[D].济南:山东大学,2007.
[15] 徐啸.仿真机器人足球赛进攻策略的研究与实现[D].沈阳:沈阳工业大学,2007.
[16] 吕冬梅.足球机器人路径规划算法的研究及其仿真[D].青岛:青岛科技大学,2006.
[17] 孔凡天.无线传感器网络节点定位与数据融合技术研究及实现[D].武汉:华中科技大学,2006.
[18] 姜丽萍.番茄力学特性及其在采摘机器人执行器设计中的应用[D].镇江:江苏大学,2006.
[19] 刘雪飘.机器人足球比赛中的动态路径规划研究与系统软件设计[D].西安:西北工业大学,2006.
[20] 续欣莹. MiroSot足球机器人决策子系统的研究与设计[D].太原:太原理工大学,2005.
[21] 邢伟.基于GPS/INS的自主移动机器人定位和路径规划的设计与实现[D].哈尔滨:东北农业大学,2015.
[22] 王鸿鹏.复杂环境下轮式自主移动机器人定位与运动控制研究[D].天津:南开大学,2009.
