航空静电喷雾技术现状及其在植保无人机中应用的思考
2018-06-06刘武兰周志艳陈盛德罗锡文兰玉彬
刘武兰,周志艳,陈盛德,罗锡文,兰玉彬
(1. 华南农业大学 工程学院/广东省农业航空应用工程技术研究中心,广州 510642;2. 国际农业航空施药技术联合实验室,广州 510642;3. 南方粮油作物协同创新中心,长沙 410128)
0 引言
植物在生长过程中,各种病虫草害、农药残留及环境污染等问题对植物健康生长有巨大的不利影响,导致农作物大量损失,土壤土质污染,对农林产业的可持续发展产生巨大的不利影响[1-2]。我国的农药生产技术属于国际先进水平,而我国的植保机械和农药喷施技术却相对落后。目前,我国的耕地面积经受农药污染高达1 300~1 600万hm2[3]。农林植物的生物灾害较严重是我国亟需解决的关键性问题之一,每年的粮食作物遭受侵害约有3.6 亿hm2是因为生物灾害,虽然经过普通防治办法后,可挽回部分经济损失,但仍有4 000万t多粮食遭受损失。在其他主要农作物方面,如棉花每年损失近24%,水果、蔬菜每年损失约20%。据联合国粮农组织(FAO)统计数据估计,病虫草害导致的粮食作物损失占全世界粮食损失的1/3,其中10%是病害导致的损失,14%是虫害导致的损失,11%则是因为草害损失[4-7]。我国每年林业高达0.11亿hm2的面积遭受生物灾害,造成的直接经济损失和生态服务价值损失近千亿元。农林植物保护(植保)是保证农林作物健康成长、丰产丰收的重要措施之一[4-5]。喷施农药是目前农林植保的常用生物灾害防治办法,主要目的是将植物病、虫、草害,以及其它有害生物消灭于危害之前,促进植物健康成长。
长期以来,我国农药喷施以地面植保作业方式为主,且一直停留在传统的大容量和大雾滴喷雾的技术水平上,不仅作业效率低下,而且过量施用造成严重的环境污染和农产品品质下降等一系列问题,已难以满足农业可持续发展的需要。静电喷雾技术作为现代植保机械施药的新技术而受到国内外各专家学者的广泛关注,该技术能较好地解决传统施药中存在的重要问题[2]。然而,目前静电喷雾应用在农业植保技术领域无论是在地面器械喷药还是飞机空中施药上都存在一系列问题,如静电喷雾系统复杂、高压静电发生电源过重,以及静电喷头荷电效果、雾化效果较差等,都是影响静电喷雾效果重要的因素。因此,加快推进静电喷雾技术的发展是农业植保领域新的任务与挑战,在减少农药的施用量、降低对环境的污染和提高农产品质量等方面具有广阔的发展空间和良好的应用前景[8]。
航空静电喷雾系统装置是基于雾滴荷电原理通过高压静电使药液雾滴带上电荷而设计的一套静电喷雾系统。通过静电喷施的方式施药可有效地提高农药在靶标表面和背面的附着率、分布均匀性,也可起到减小雾滴飘移的作用,减少了农药的浪费,提高了农药利用率[9-10]。
本文拟对航空静电喷施技术理论原理进行分析和研究,介绍国内外学者在航空静电喷施技术上开展研究中取得的进展,并对航空静电喷施技术在农业植保领域开发与应用中存在的问题进行分析与讨论,提出航空静电喷雾技术应用在植保无人机静飞行航空作业上需解决的难题和未来可能的发展趋势和解决方案,以期为研究开发出更有效的植保无人机静电喷施技术提供借鉴与参考。
1 航空静电喷雾技术的原理概述
1.1 航空静电喷雾技术
两个电荷相互作用产生的作用力为库仑力,即F=Eq,粒子带电后在电场力作用下会沿着电场线的方向运动。航空静电喷雾系统产生高压静电,静电作用使药液雾滴荷上正或负的电荷。喷雾作业过程中,若给喷头加静电,则喷嘴到靶标作物之间形成电场线。若电场足够大雾滴就会被荷电,荷电的雾滴在电场力作用下沿着电场线的方向运动,雾滴沉降至靶标作物表面后,通过静电吸附作用附着在作物的正面或背面;带静电的雾滴可较长时间附着不流失,提高了雾滴沉降效果和农药的利用率,降低了环境的污染[11],增强了防治效果。
液体的静电雾化效果是研究航空静电喷雾技术的关键指标之一,其静电雾化机理是指航空静电喷头充电电极和农作物冠层或者大地电极之间,高压静电发生器给充电电极充上数千伏的高压时,由喷嘴喷孔喷出经过高压静电感应电场区的带电雾滴,受到雾滴自身重力、表面张力及电场力三者共同作用,导致雾滴群表面极不稳定,进而破碎分裂成更小的雾滴或离子,这一现象称为静电雾化[10, 12]。静电喷雾可以以较低的施药量而达到防治的目的[13]。
航空静电喷雾,就是高压静电发生器给静电喷头的充电电极充上正的或负的静电高压并使喷嘴喷出的雾滴经过高压电场带上电荷[14],原理如图1所示。如果静电喷头的充电电极被充上正或负的高压,根据静电感应原理,药液雾滴由喷嘴喷出流经电场感应区时被荷上电荷,而处在电场区内的靶标作物表面则会感应出和电极极性相反的电荷;根据带电粒子同性相斥异性相吸的作用原理,荷电雾滴受到充电电极的排斥作用力,沿电场线向靶标作物做定向运动,因电场线分布于目标的各个部位且呈环抱式分布,而使雾滴向目标的各个位置沉降[15]。因此,航空静电喷雾技术最重要的优势之一是不仅使靶标作物叶片正面吸附雾滴,背面和隐蔽部位均可附着药液雾滴。
1.目标 2.喷嘴 3.带电雾滴 4.地面图1 静电喷雾技术原理图[1]Fig.1 Electrostatic spray technology
1.2 高压静电雾滴荷电原理
高压静电给雾滴荷电一般主要有3种方式:电晕荷电法、接触式荷电法和感应荷电法,荷电装置及荷电原理图如图2和图3所示。
1.喷杆 2.喷头 3.喷雾雾滴流 4.充电极环 5.针状电极图2 静电装置工作原理图[16]Fig.2 Working principle diagram of electrostatic device
(a) 电晕荷电 (b) 感应荷电 (c) 接触荷电图3 雾滴荷电的电路原理图[19]Fig.3 Schematic of charged droplets
电晕荷电法,如图2和图3(a)所示。将L1和L2同时接地,L3接静电高压发生电源的正极输出引脚,尖端针状电极被高压静电发生器充电后进行放电,将空气击穿电离产生局部强电场,药液雾滴经过电场区荷上电荷。药液经喷头喷出后雾化, 雾化后的雾滴在喷头外部被荷电,通常需要2万V以上高压才能实现。
感应式荷电法,如图2和图3(b)所示。在L1和L2之间加电源,去掉尖端电极,在喷头的喷嘴与充电极环之间形成的感应电场给雾滴荷电。感应荷电方式决定了电极必须要与药液雾滴绝缘,感应荷电需要的电压较低,通常1万V以内即可实现荷电,可直接将高压线连在普通喷头的感应电极上。
接触式荷电法,如图2和图3(c)所示。L1直接接高压静电发生器输出引脚,或将引脚接入管路药液中,感应极环和尖端电极均去除,液体和大地之间形成电场,根据集肤效应,药液表面集聚大量电荷,雾化后的雾滴带电。由于药液雾滴经喷头喷出到地面的距离比较大,所以这种雾滴荷电方式需要的荷电电压较高,电压大约要达到2万V[17]。
对比以上荷电方法,电晕荷电方式需将空气电离产生局部强电场,接触式荷电方式将药液极化,感应荷电方式通过感应电场时使雾滴荷上电荷[18]。
2 国内外农业航空静电喷雾现状
2.1 国外农业航空静电喷雾发展现状
静电喷雾技术是近年来发展较快、应用较广并被广泛关注的一项先进的植保施药技术。20世纪40年代,法国的Hampe通过喷撒农药进行了静电技术的首次试验研究,随后,美国的一些大学(如佐治亚大学)相继开展了静电喷雾技术应用研究。结果表明:利用静电喷施粉剂农药,可以大幅提高药粉的附着率和沉积量。欧美的部分国家,大幅度减少粉剂农药,静电施药技术应用从粉剂逐渐转化为液体农药的使用量,如英国、加拿大、美国等一些国家相继展开了静电喷施液体农药的相关试验研究。结果表明:静电喷雾对药液沉降具有促进作用,静电作用不仅提高了药液雾滴在靶标背面的附着率,同时在一定程度上也抑制了小雾滴的飘移,有效提高了施药效果。
早在20世纪60年代,静电喷雾技术被应用于农业航空领域。美国农业部(USDA-ARS)Calton博士和Isler博士[20]研制设计出一种电动旋转式喷嘴,利用高压充电环给雾滴荷电[21],如图4所示。航空喷洒试验过程中发现,这种荷电方式可以给药液雾滴荷上电荷;并且,使用双极充电模式[22]给药液雾滴充电,药液雾化效果更好,雾滴在电场力作用下迅速沉降,对雾滴飘移起到了一定的抑制作用,提高了喷雾效果。
在开展静电喷洒粉剂农药的研究基础上,Calton建立了基于Cessna180型农用飞机机身电容和飞行作业高度的函数[23];此后,Calton和Bouse开展了静电喷雾充电理论以及电场分布理论的相关研究,通过采样机身周围的电荷经测量分析电场强度[24]。结果表明:根据集肤效应原理,电荷容易集聚在机身表面产生电晕放电,饱和状态后首先在翼尖处产生尖端放电,改变飞机飞行高度或者机体几何形状机身表面集聚的电荷分布随之发生改变[25]。这些试验研究给后期开展静电喷雾技术应用在航空喷雾作业上提供了理论依据和研究基础。
图4 早期电动旋转式喷嘴[21]Fig.4 Early electrostatic rotary spray nozzle
20世纪80年代末,美国佐治亚大学的S.E.Law[26]等专家根据静电喷施液体农药研究分析结果,成功研制了气助式静电喷雾系统(AA—ESS) 和静电喷雾系统(ESS)。自20世纪90年代以来,气助式静电喷雾系统(AA-ESS)[27]作为比较先进的地面喷雾器械问世,该系统采用电极嵌入式静电感应喷头,喷头使喷射雾滴通过喷嘴处的环形电极时产生电荷,带电雾滴受压缩气体湍流的动力作用以极高的速度运输到植物冠体内。其沉积密度提高2倍以上,大大提高了农药与植物病虫害的接触面积,增强防治效果约1.5~2倍,用药量比液压喷雾器节约50%以上。
为了达到更好的病虫害防治效果,各国开始研究更先进的静电喷雾技术,相继开始对静电喷雾技术在农业航空施药上展开更深入的研究。
1966年,Carlton等研究人员开展航空静电喷雾技术研究且在1999年Carlton获得该系统专利[28]。该系统与地面不同之处是,每一相距30mm相连的2个喷嘴组成[29](见图5),飞机机身和支架上静电场近似于零[30],研究分析得到了充电电压、喷雾压力、雾滴平均直径和施药量等较佳的喷雾参数。2001年,Kirk、Carlton[31-33]等研究人员开展了系统在棉花上的田间应用效果试验;2003年,Kirk[34]等开展了抗飘移性能试验研究,结果表明:农用飞机搭载航空静电喷雾系统喷雾作业,施药量明显减少,药液雾滴沉降速度及沉积率明显提高,但对病虫害防治效果和减少下风处的喷雾飘移并没有明显的作用。
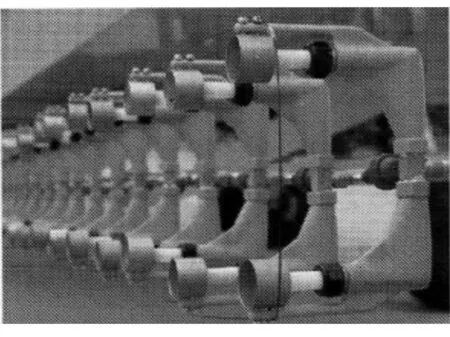
图5 航空静电喷头Fig.5 Air electrostatic spray nozzle
喷嘴结构是影响航空静电喷雾药液雾化效果和雾滴荷电大小重要的因素之一,不同类型的喷嘴直接影响雾滴的雾化效果[35]。各国相继对静电喷嘴做了相关方面的研究,其中液力雾化喷嘴和旋转离心雾化喷嘴(见图6) 为主要的两大类型喷嘴模型。液力雾化喷嘴模型设计与地面施药器械喷嘴的区别主要是由于飞机飞行速度较快、高速空气流及安装角度等各个方面的因素造成的。其中,可以随意改变喷嘴孔径大小的CP 喷嘴适应各种喷雾,应用较为广泛。
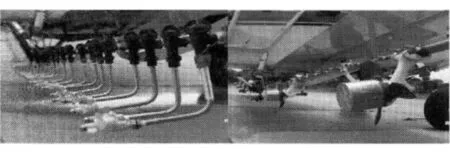
图6 航空施药喷头[35]Fig.6 Air spraying nozzle
早在1954年开始,Akesson、Bouse 、Hewitt、Picot[36]等对喷嘴雾滴谱的影响参数开展了相关实验研究,因没有统计出有效的数据而间断。直到1990年,由几十家美国企业组成的农药飘移研究小组(Spray drift task force,SDTF) 统计分析了近2 000个喷嘴产品的数据对喷嘴飘移[37]特性进行了评估分析;几年后,Hermansky、Hewitt[38]等分别建立了相应的喷嘴模型。
目前,美国将其中的DSDAARS的DropKirk模型作为航空施药作业条件选择的重要依据[39]。该模型对航空静电喷头的研究设计提供了技术基础,为解决航空静电喷头静电雾化、荷电特性和喷头结构优化等相关问题提供了理论依据,也为后期研究适用于植保无人机静电喷雾的静电喷头提供了技术基础。
2.2 国内农业航空静电喷雾研究现状
我国开展将静电喷雾技术应用在农药喷施领域研究起步比较晚。20世纪70年代末,我国逐渐开始涉足该领域的技术研究,很多学者及专家主要针对地面喷药器械研究了药液雾滴粒径、荷质比的大小、静电喷头静电雾化性能、雾滴沉降规律及分布密度特性等参数[40-42],先后研制了手持式静电喷雾器、手持电场击碎式静电喷雾器、高射程静电喷雾器和风动转笼式静电喷雾机[43]。同时,针对多种靶标农作物,进行了静电喷雾器械喷雾性能和病草虫害的防治效果试验验证和参数测定。
直到2011年,茹煜、周宏平等以固定翼Y5B农用飞机为测试试验研究对象,设计了一种航空静电喷雾系统(见图7),主要包括航空静电喷嘴、高压直流电源及内嵌式圆柱电极感应荷电装置等,具有促进雾滴雾化均匀、荷电充分的作用。与Y5B农用飞机配套试验,运用该系统喷施灭虫剂,进行了静电喷雾与非静电喷雾条件下有效喷幅、雾滴沉积、雾滴飘移试验研究[44]。
(a) 航空静电喷雾系统
(b) 双极喷雾模式图7 植保无人机静电喷施系统[5]Fig.7 Electrostatic spraying system for plant protection UAV
试验结果表明:静电喷雾能使雾滴沉积提高14个/cm2,有效喷幅高达42m。静电作用可抑制雾滴漂移且雾滴分布均匀,且提高雾滴沉降分布效果,减少了环境污染,有效提高了农药利用率,而运用航空喷雾技术可大大提高农林病虫害防治效率。航空静电喷雾是以上两种技术的结合,在防治农林病虫害的实际应用上发挥更大的作用。2012年,他们继续对航空静电喷雾系统装置做了改进,并进行试验,对效果进行对比,但并未将其移植于植保无人机进行药液沉积试验,没有研究该系统在无人机植保领域的适用性。
为了达到更有效的航空植保施药效果,促进航空施药技术在国内植保无人机上的应用。2013年,周立新、薛新宇等对无人直升机农药喷洒系统进行了研究[45]。如图8(a)所示:系统主要包括电动离心喷头、折叠式喷杆、药箱、控制系统、液泵及机架等。药液箱采用双加液口、对称式流线型结构,可以有效减少空气阻力,大幅度增加飞机飞行的稳定性。如图8(b)所示:施药控制系统通过GNSS自动化导航与智能控制等技术实现定点精准施药,并监控整个施药过程,避免出现重喷、漏喷。开展了水稻病虫害防治对比试验,结果表明:在水稻分蘖期,无人直升机农药喷洒系统的防治效果相对常规担架式喷雾机喷洒农药的防治效果占有优势,施药10天后,防治效果最为显著。无人直升机施药技术将传统常规施药技术和无人直升机技术两种技术相结合,既保留了传统常规喷药的优点,也更好地改进了常规喷药的不足,大大提高了防治效率。无人机具有尺寸小、质量轻、易操控、喷洒效果好、作业效率高及防治效果好等优点,对于中、小田块的病虫害防治或大田块局部精准施药有着明显的优势,是当前航空施药作业装备与技术的研究及发展重点;受到技术水平、作业安全性及复杂环境等因素的制约。
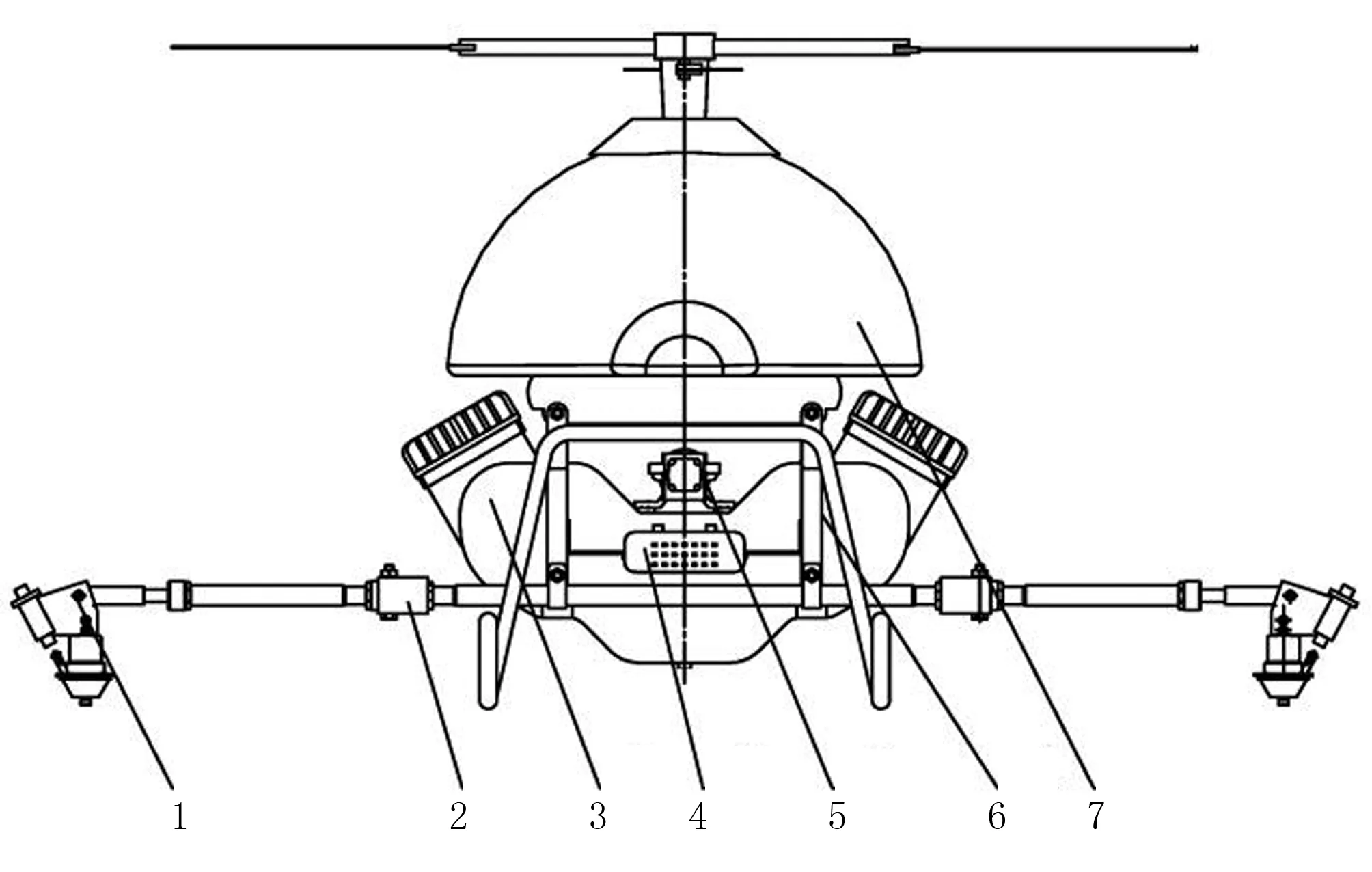
1.电动离心喷头 2.折叠式噴杆 3.药液箱 4.施药控制系统 5.液泵 6.机架 7.无人直升机 (a) 农药喷洒系统
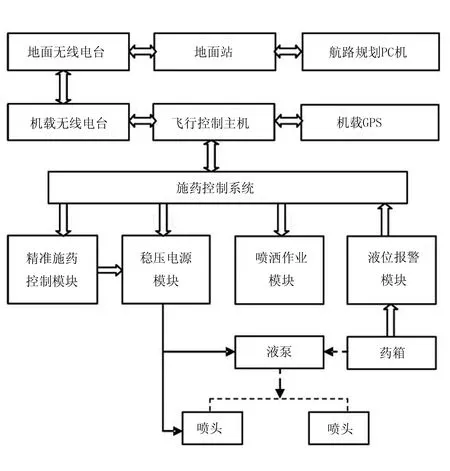
(b) GNSS导航定位系图8 植保无人机农药喷洒系统施药控制系统原理Fig.8 Agricultural pesticide spraying spraying system of plant protection UAV control system principle
农药喷洒系统装载在无人直升机上,无人直升机的飞行稳定性受到一定的影响,同时增加了无人直升机的操控复杂性。该研究针对无人直升机飞行特性与施药特点,研究设计出了无人直升机农药喷洒系统,并进行田间病虫害防治。无人机农药喷施试验说明了无人机运用的广泛性,无人机运用于植保作业领域具有其独特的优势,但仍然存在漂移损失、药液雾滴在靶标背面不易沉积等问题,将航空静电施药技术运用到无人机植保上具有广阔的前景和应用价值。
2014年,金兰、茹煜等研究人员针对圆锥状电极式航空静电喷头进行了性能试验研究[46],优化改进了航空静电喷头结构,如图9所示。
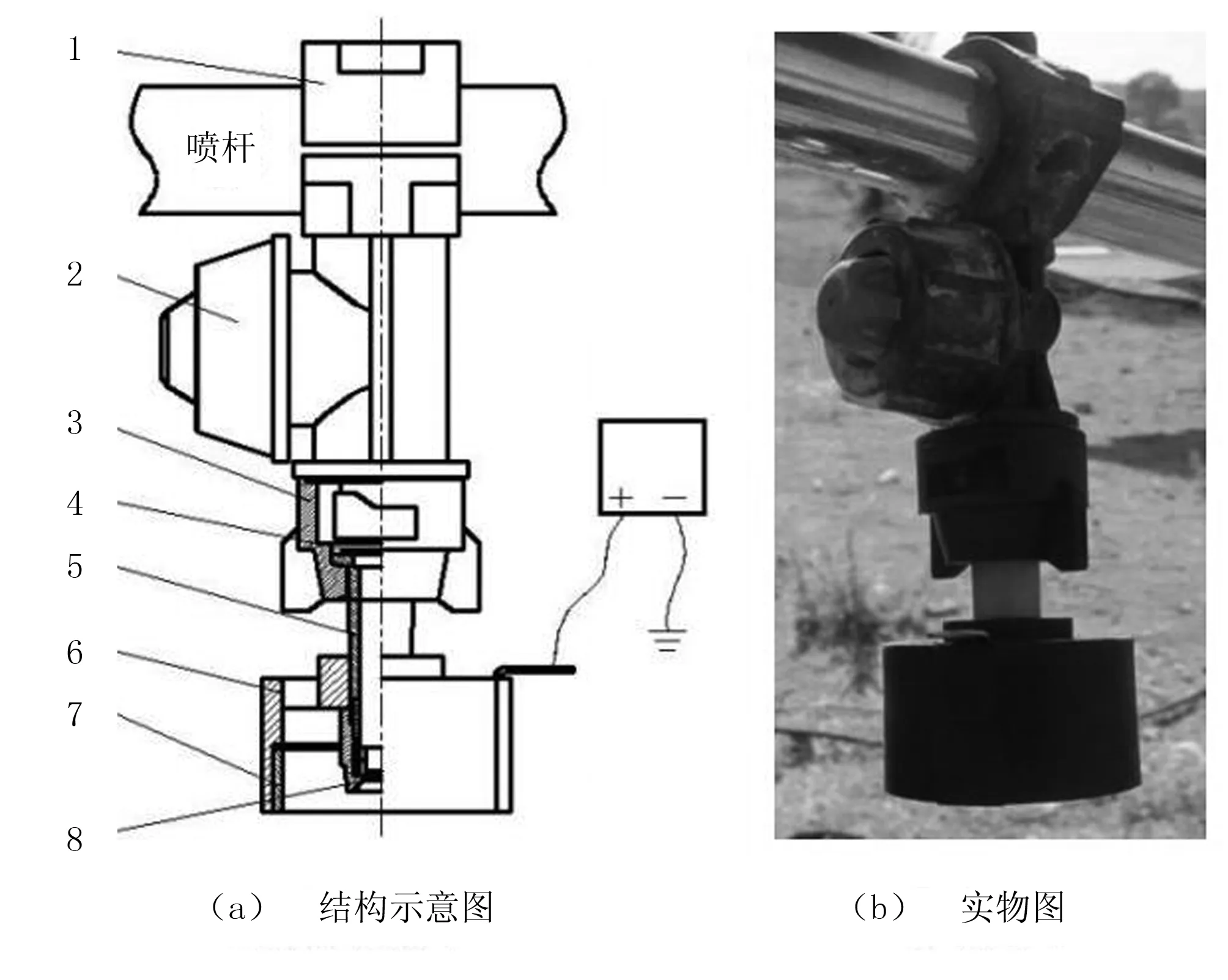
(a) 原有航空静电喷头
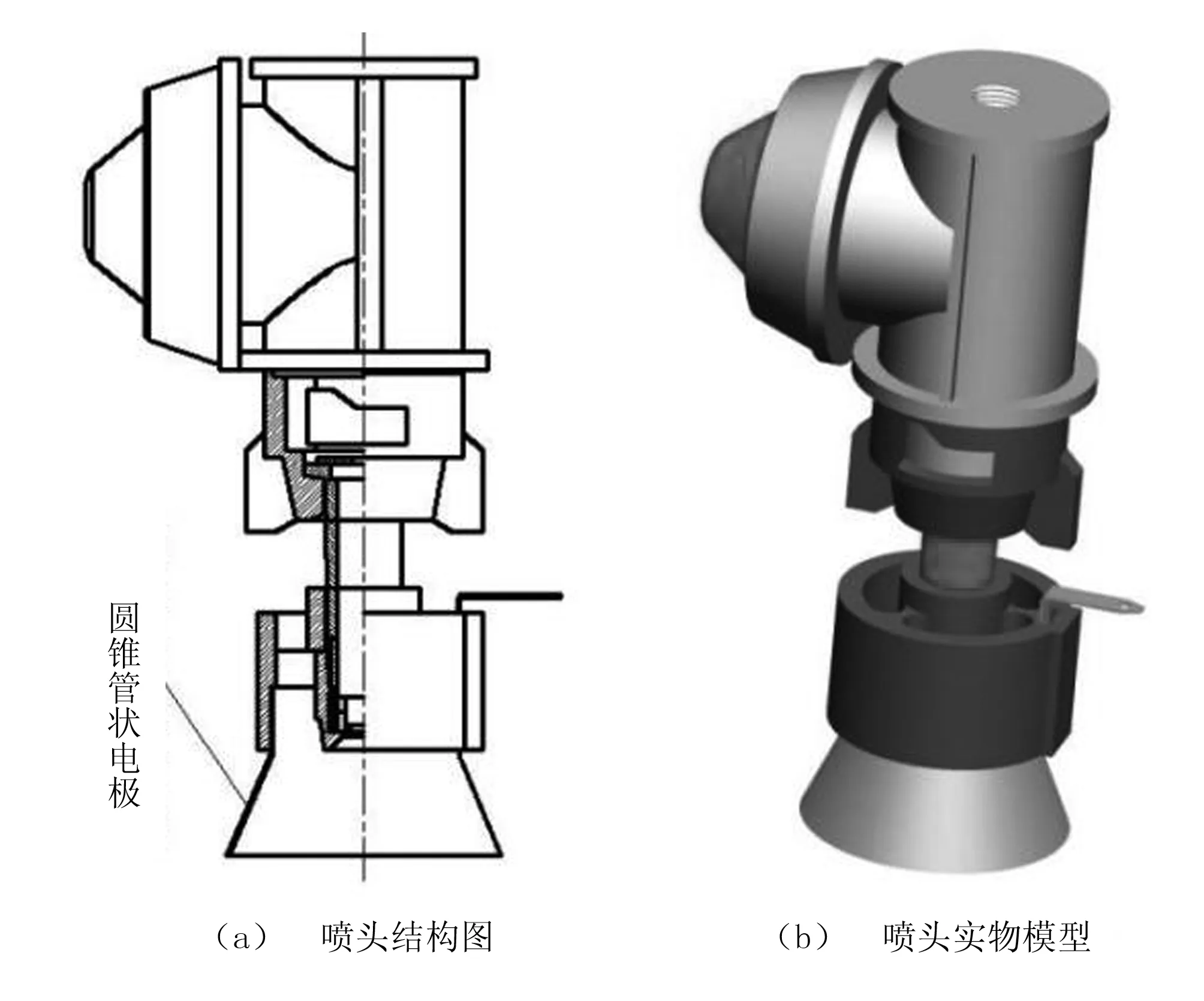
(b) 改进型航空静电喷头图9 改进前后航空静电喷头[46]Fig.9 Improved air electrostatic spray nozzle
利用激光粒度仪、法拉第筒和粒子图像测速系统(PIV)研究喷头喷嘴直径、喷雾压力、荷电电压参数对于静电喷头雾滴粒径、荷质比、荷电雾滴雾化流场的影响。研究分析得出:药液雾滴粒径主要影响因素包括喷嘴直径、喷雾压力和荷电电压等参数,喷雾压力对雾滴粒径影响最为明显;其次是喷嘴直径;荷电电压大小变化对雾滴粒径影响较小,但可促进雾滴间相互作用二次雾化。荷质比随电压的增加而增加,最大可达到 2.09 mC/kg,并在电压为 8kV 以后趋于饱和,荷质比随雾滴粒径的变大呈下降趋势,但是影响并不明显。此次航空静电喷头的改进研究,为提高航空静电喷雾作业质量和高效喷洒应用提供有利依据,并给植保无人机静电喷施系统的研究开发提供了技术基础。
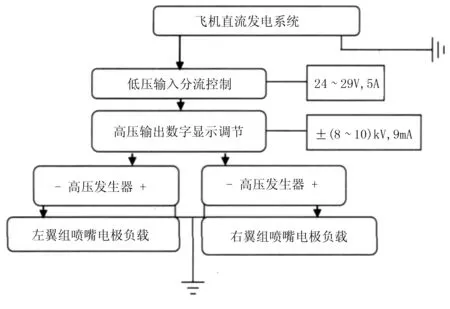
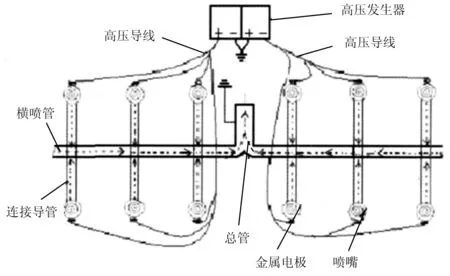
在此研究基础上,茹煜等研究人员初步研究设计了无人机直升机航空静电喷雾系统[47],如图10所示;试验验证了静电喷雾技术在无人机上运用的可行性,说明了在静电作用的条件下,雾滴雾化效果要比非静电喷雾要好,相同药量条件下静电喷雾更能发挥药液的效能。该试验没有研究如静电喷头结构、电压大小及无人机飞行条件等参数对无人机喷雾效果的影响,无人机静电喷雾仍需不断深入研究。
农业航空技术在农林植保的应用已纳入科技部和农业部在“十二五 ” 科研规划重要支持方向[48],航空静电喷雾技术需在农业航空施药的基础上展开更深入的研究。
在农业航空静电喷雾技术应用广泛性和适用性的研究基础上,与部分发达国家相比,我国对航空静电喷施基础理论原理、药液雾滴沉积特性、雾滴荷电原理、变量控制施药及精准施药等方面仍存在不足,后期需展开大量的试验研究,为航空静电喷雾技术在植保无人机的广泛应用提供理论依据和技术保障。
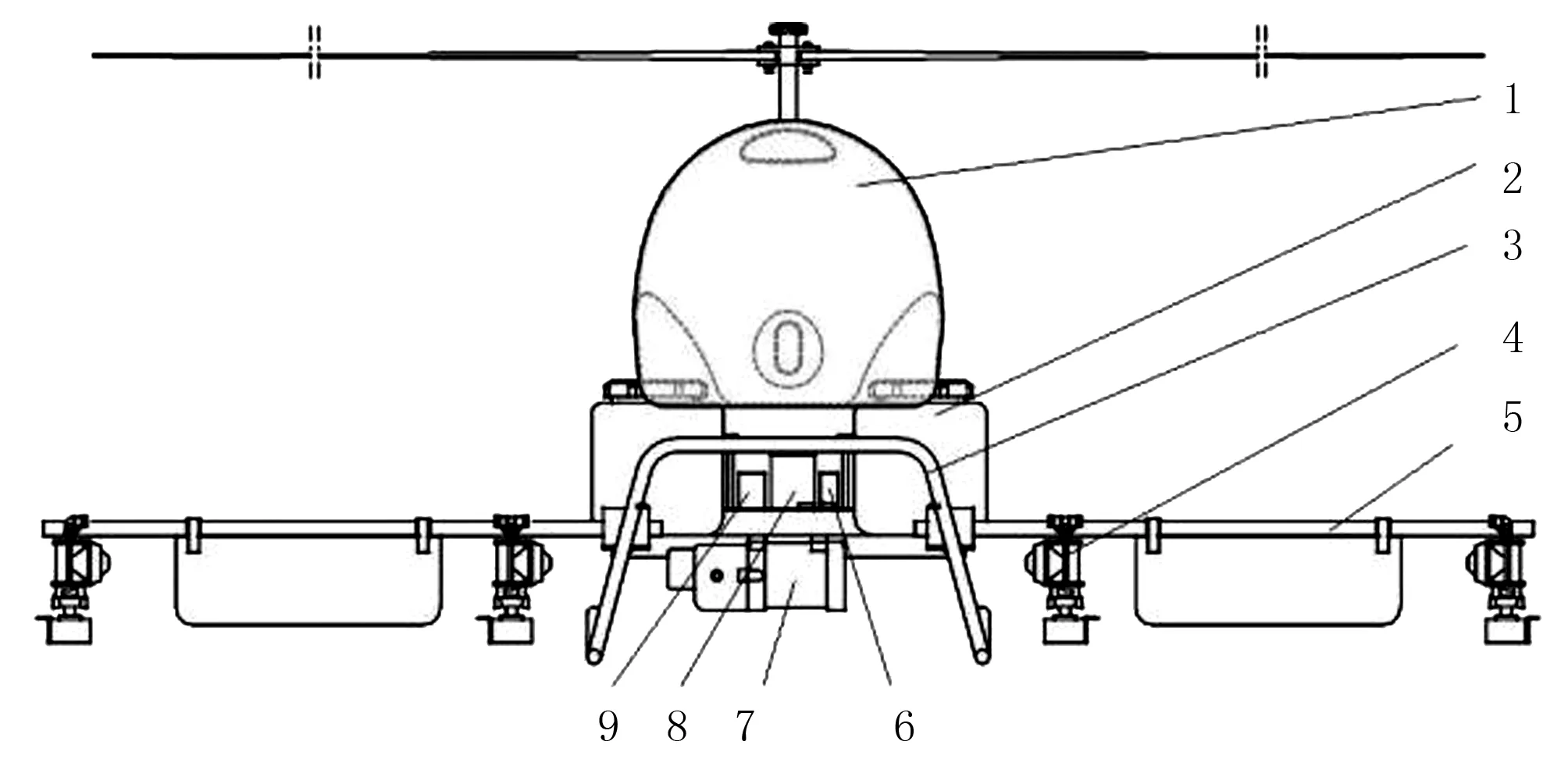
1.机身 2.药箱 3.起落架 4.喷头 5.摆动悬臂 6.电池 7.水泵 8.控制装置 9.高压静电发生器图10 植保无人机喷雾系统Fig.10 Plant protection UAV - based spraying system
3 存在的问题与思考
3.1 荷质比的实时测量方法
荷质比作为衡量航空静电喷雾系统性能的重要指标之一,是研究植保无人机静电喷雾技术荷电特性与静电喷雾下雾化效果的重要基础,荷质比是影响喷雾幅宽、雾滴粒径、雾滴沉降速度及雾滴的沉积规律等重要参数之一。
法拉第筒测量法是目前带静电物体荷质比测量的常用方法。但传统的法拉第筒无法直接用于测量静电喷雾雾滴的荷质比,主要存在如下几方面的问题。
1)传统的法拉第筒内外筒之间不封闭,雾滴容易进入内外筒的间隙中,造成电荷损失,影响测量的准确度。
2)传统的法拉第筒缺少液体收集装置,不便于进行喷雾雾滴总质量的确定,影响荷质比的计算。
3)传统的法拉第筒缺少电荷量采集及数据处理分析系统,难以对喷雾雾滴荷质比进行实时采集与分析。
3.2 荷电方式的优化
前文提到的3种静电荷电方式中,常规的人力背负式作业器械一般采取直接荷电(接触式荷电)方式;但由于该荷电方式要求药液具有很强的导电性,且要在液体和大地之间形成电场,而由于飞机的作业性质及本身结构及材料的特点决定了该方式难以在植保无人机上应用。电晕荷电法需要较高的电压,易对植保无人机的机上电子设备造成干扰。因此,相比之下,感应荷电方式较适合在植保无人机上应用。目前,感应荷电方式要解决的关键问题包括静电发生器过重及雾滴荷电量不够充足等;另外,由于喷头结构多样,不同药液剂型的粘度、电导率差异较大,雾滴谱也有较大差异。因此,不同喷头条件下如何获得最大荷电量,取得最佳喷雾效果,仍需开展大量试验进行优化选择和创新设计。
3.3 航空专用静电液剂
目前,市场上常用航空喷施制剂大部分为用于地面机械的可湿性粉剂和水悬浮剂,主要缺点是耗水量大;而植保无人机有效载荷量有限,既要保证药液达到规定的施用量,又要保证作业效率,目前的解决方案是采用高浓度超低量喷雾方式,这就要求雾滴更细、沉积量更大。采用水溶剂方式进行超低容量喷雾,存在雾滴粒径小、挥发快、电导率较高、静电荷电效果不理想等诸多瓶颈性问题,亟需开发航空专用静电液剂,在药液用量更少的情况下,减少挥发、提高雾滴荷电量、增加沉积率,以及提高药液雾滴在靶标表面的分布均匀性,达到更好的防治作业效果。
3.4 高压静电发生系统的模型建立与电磁干扰消除
植保无人机搭载静电喷雾系统进行航空施药时,高压静电对植保无人机上电子设备的干扰,进而对飞机作业安全、稳定性造成的影响是目前人们对植保无人机领域应用静电喷施技术的主要担忧之一,高压静电发生器产生的静电高压如果没有做相应的隔离保护有可能干扰飞控、GNSS接收器等相关器件,影响其信号接收的稳定性。针对这些干扰问题,可采用强弱电隔离、弱电保护及接地保护等措施解决;同时,需开发功耗小、性能稳定的植保无人机静电喷施系统,避免系统本身的不稳定性问题和安全性问题的发生。
基于上述提到的关键性问题,在航空静电喷雾技术应用在植保无人机喷药作业的研究过程中,可应用粒子成像测速技术(Particle Image Velocimetry, PIV)及激光多普勒测速技术(Laser Doppler Velocimetry,LDV)等相关技术[49],针对静电雾化、雾滴荷电理论,开展深入试验研究,逐步建立精确的数学模型[50];研制耐压值更高(5万V左右)、结构性能更好的静电雾化喷头材料,改进雾滴荷电方式,设计荷电性能优良的航空静电喷头,提高喷头荷电稳定性、安全性和使用寿命;优化改进高压静电电场和雾化流场的模拟方法,设计完善施药系统;优化改进高压静电发生器,设计强弱电隔离电路与模块,避免高压静电对植保无人机飞行的影响;研制适用于植保无人机静电喷雾的专用静电药剂,增强雾滴荷电性能,提高药液雾滴靶标附着率,降低环境污染。
参考文献:
[1] 沈从举, 贾首星, 汤智辉, 等.农药静电喷雾研究现状与应用前景[J].农机化研究, 2010,32(4):10-13.
[2] 周志艳,臧英,罗锡文,等.中国农业航空植保产业技术创新发展战略[J].农业工程学报, 2013(24):1-10.
[3] 张东彦, 兰玉彬, 陈立平, 等.中国农业航空施药技术研究进展与展望[J].农业机械学报, 2014(10):53-59.
[4] 林蔚红, 孙雪钢, 刘飞, 等.我国农用航空植保发展现状和趋势[J].农业装备技术, 2014(1):6-11.
[5] 周宏平, 茹煜, 舒朝然, 等.应用于直升机的航空静电喷雾系统设计与试验研究[C]//第二届中国林业学术大会——S12 现代林业技术装备创新发展,南宁, 2009:30-37.
[6] 茹煜.农药航空静电喷雾系统及其应用研究[D].南京:南京林业大学, 2009.
[7] 茹煜, 范庆妮, 吴小伟.应用于航空植保的雾化装置设计[C]//新形势下林业机械发展论坛,威海, 2010:1-3.
[8] 赵淑莲.探讨中国农业航空植保产业技术创新发展战略[J].农业与技术, 2014(11):138.
[9] 周宏平, 茹煜, 舒朝然, 等.航空静电喷雾装置的改进及效果试验[J].农业工程学报, 2012,28(12):7-12.
[10] 舒朝然, 潘宏阳, 周宏平, 等.航空静电喷雾与非静电喷雾沉积效果的比较[J].林业科学, 2012(4):75-80.
[11] 徐晓军, 吴春笃, 杨超珍.荷质比对荷电雾滴沉积分布影响的初步研究[J].农机化研究, 2011,33(11):138-142.
[12] 茹煜, 郑加强, 周宏平, 等.航空双喷嘴静电喷头的设计与试验[J].农业机械学报, 2007(12):58-61.
[13] Y Huang, W C Hoffmann, Y Lan, et al.DEVELOPMENT OF A SPRAY SYSTEM FOR AN UNMANNED AERIAL VEHICLE PLATFORM[J].Applied Engineering in Agriculture,2008,25(6):803-809.
[14] W Clint Hoffmann.Spray Characterization of Ultra-low-volume Sprayers Typically Used in Vector Control[J].The American Mosquito Control Association,2009,25(3):332-337.
[15] Y Lan, W C Hoffmann, B K Fritz, et al.Spray drift mitigation with spray mix adjuvants[J].Applied Engineering in Agriculture,2008,24(1):5-10.
[16] 刘文艺, 余泳昌, 冯春丽, 等.静电喷雾装置的动力设计研究[J].农机化研究, 2006(9):118-121.
[17] 李海强.静电喷雾的工作原理及分析[J].绿色科技, 2013(7):303-304.
[18] 茹煜, 周宏平, 贾志成, 等.航空静电喷雾系统的设计及应用[J].南京林业大学学报:自然科学版, 2011(1):91-94.
[19] 刘鹏.农用航空静电喷头的设计与试验研究[D].大庆:黑龙江八一农垦大学, 2014.
[20] Carlton J B, Isler D A.Development of a device to charge aerial sprays electrostatically[J].Agricultural Aviation, 1966.
[21] 张亚莉, 兰玉彬, Bradley K Fritz, 等.美国航空静电喷雾系统的发展历史与中国应用现状[J].农业工程学报, 2016(10):1-7.
[22] 李人杰.双极荷电静电除尘器捕集可吸入颗粒物过程的数值模拟[D].武汉:华中科技大学, 2007.
[23] Carlton J B.Electrical capacitance determination and some implications for an electrostatic spray-charging aircraft[J].1975,18(4):641-644.
[24] Carlton J B. Distribution of the electric-field for an electrostatic spray charging aircraft [Pesticide application equipment][J]. Transactions of the Asabe, 1977(2):248-252.
[25] Carlton J B, Bouse L F. Spray Deposit Sampling Technique to Evaluate Electrostatic Aerial Spray-Charging[J]. Transactions of the ASAE [American Society of Agricultural Engineers], 1978,21(1):2-5.
[26] Antuniassi Ulisses R, Velini Edivaldo D, de Oliveira Rone B, et al. SYSTEMS OF AERIAL SPRAYING FOR SOYBEAN RUST CONTROL[J]. ENGENHARIA AGRICOLA, 2011,31(4):695-703.
[27] Sides Michael L. Electrostatic spray system:US,US87465
97(B2)[P].2017-03-04.
[28] Carlton James B. Technique to reduce chemical usage and concomitant drift from aerial sprays,US[P].2017-03-01.
[29] Kirk I W. Aerial electrostatic spray system performance.[C]//Asae Inernation Meeting,2000.
[30] MALCOLM DAVID H. Energy conversion unit for electrostatic spray coating apparatus and the like:US4219865A[P].2017-03-01.
[31] MACDONALD STANLEY. Electrostatic dry-powder spraying: GB2204254A[P].2017-03-01.
[32] Martin D E, Carlton J B. AIRSPEED AND ORIFICE SIZE AFFECT SPRAY DROPLET SPECTRUM FROM AN AERIAL ELECTROSTATIC NOZZLE FOR FIXED-WING APPLICATIONS[J]. APPLIED ENGINEERING IN AGRICULTURE, 2013,29(1):5-10.
[33] KATAYAMA SHINJI. ROTATIONAL SPRAY ELECTROSTATIC COATING APPARATUS: JP08108104A[P].2017-03-01.
[34] Kirk T L, Pietro L G De, B Hler T, et al. Ultra-high resolution imaging via SPM-induced electron excitation[C]//International of Vacuum Congress,2010:5-7
[35] 薛新宇, 兰玉彬.美国农业航空技术现状和发展趋势分析[J].农业机械学报, 2013(5):194-201.
[36] Wallace Kirk D, Marsh Jon N, Iii Lewis J Thomas, et al. Ultrasonic Molecular Imaging of Primordial Angiogenic Vessels in the Papilloma Virus Transgenic Mouse with alpha(v)beta(3)-Integrin Targeted Nanoparticles Using Renyi Entropy-Based Signal Detection[C]//Proceedings of the IEEE Ultrasonics Symposium, 2008:3-5.
[37] Kostko O, Morgner N, Hoffmann M. Astruc, et al. Electronic and Geometric Structure of Noble Metal Clusters[C]// International Symposium on Small Particles and Inorganic Clusters, 2004.
[38] Hewitt. Integrating Environmental and Quality Management Systems [C]// Asqc World Congress, 2006.
[39] REEVES CLARENCE C.Electrostatic spray apparatus: US4491276A[P].201-03-01.
[40] 何雄奎, 严苛荣, 储金宇, 等.果园自动对靶静电喷雾机设计与试验研究[J].农业工程学报, 2003(6):78-80.
[41] 张军, 郑捷庆.静电雾化中滴径分布及局部流量沿径向分布规律的试验[J].农业工程学报, 2009(6):104-109.
[42] 贾卫东, 胡化超, 陈龙, 等.风幕式静电喷杆喷雾喷头雾化与雾滴沉积性能试验[J].农业工程学报, 2015(7):53-59.
[43] 余泳昌, 王保华, 史景钊, 等.手动喷雾器组合充电式静电喷雾装置的雾化效果试验[J].农业工程学报, 2005(12):85-88.
[44] 茹煜, 金兰, 周宏平, 等.雾滴荷电特性对其沉积分布及黏附靶标的影响[J].南京林业大学学报:自然科学版, 2014(3):129-133.
[45] 周立新, 薛新宇, 孙竹, 等.无人直升机农药喷洒系统的设计及应用[J].江苏农业科学, 2013(12):396-398.
[46] 金兰, 茹煜, 孙曼利, 等.圆锥管状电极式航空静电喷头的性能试验[J].南京林业大学学报:自然科学版, 2015(5):155-160.
[47] 金兰, 茹煜.基于无人直升机的航空静电喷雾系统研究[J].农机化研究, 2016,38(3):227-230.
[48] 罗锡文. 对加快发展我国农业航空技术的思考[J]. 农业技术与装备, 2014(5):7-15.
[49] 邓鑫. 静电喷雾技术的发展现状与展望[J]. 科学咨询:科技管理, 2010(8):65.
[50] 吴小伟, 茹煜, 周宏平.基于单片机的雾化装置控制系统设计[J].农机化研究, 2011,33(5):104-106.
