基于视觉伺服的桌面型机械臂创新实验平台研制
2018-06-05郭志军李文生王博轩
杨 亮, 郭志军, 李文生, 王博轩
(1. 电子科技大学 中山学院, 广东 中山 528402;2. 中山大洋电机股份有限公司, 广东 中山 528402)
机器人[1-4]是先进制造技术[5]领域最热门和前沿的研究课题之一,它集中了人工智能、自动控制、机械、电子信息等学科,是衡量一个国家智能化水平和综合国力的重要标志。工业机械臂[6]是机器人的重要分支,以其重复定位精度高、可靠性强的优点已广泛应用于航空航天、高精度零部件制造、国防工业等领域。以大数据、物联网、人工智能、高精度数控机床等为代表的新一代信息技术,正在推动全社会各领域的深刻变革,未来新兴产业和新经济需要的是具备国际竞争力的高素质复合型“新工科”[7-8]人才,工业机械臂既有广泛的应用背景,又具有多学科交叉、综合性强的优点,将它引入高校现有实验教学体系,是探索新工科人才培养的一个有益思路。
然而,在实际操作过程中,传统工业机械臂因体积庞大、价格昂贵等原因,目前还难以在高校实验教学中推广。为此,本文提出了一种基于视觉伺服[9-11]的桌面型机械臂创新实验平台设计方案,能够通过摄像头采集目标物体图像信息,并将位置信息转换控制指令,控制机械臂完成物体抓取等任务,具有成本低、趣味性强、控制效果好的优点。
1 总体设计方案
机械臂本体部分基于dobot[12-13]开源项目,整个机械臂共有3个自由度,分别由3个42线步进电机控制,并配有一个舵机控制吸盘,以实现物体抓取任务。控制器由主控板、驱动板组成,并配有USB摄像头采集目标物体的位置信息。系统整体框图如图1所示。

图1 系统整体控制框图
为提高整个系统的鲁棒性和可扩展性,控制器硬件采用控制与驱动相分离的双层控制结构。驱动板采用AtMega64为控制单元,用于驱动3路步进电机,主控板基于ARM Cortex-A17平台,通过UART接口与驱动板通信。视觉伺服控制系统运行在主控板上,采用具有良好跨平台性的QT框架。为实现物体的自动抓取功能,控制器可通过USB摄像头采集目标物体的位置信息,并配有电容触摸屏,方便操作。
2 机械臂结构及控制器硬件电路设计
2.1 机械结构简介
机械结构以开源项目dobot机械臂为蓝本,该机械臂由回转基座、大臂、小臂、臂头等部分组成。臂头在运动过程中保持水平,可通过加装末端夹具实现物体抓取、握手写字等功能。各部件尺寸规格见表1。

表1 部件尺寸规格
2.2 硬件设计
考虑成本、控制精度等因素,该机械臂的3个自由度由3个42线步进电机驱动,并采用控制与驱动相分离的控制策略。整个系统由主控板、驱动板组成(见图2),其中主控板采用ARM Cortex-A17架构,主控芯片为RK3288,4核,主频高达1.8 GB,内嵌高性能2D/3D加速硬件,拥有2GB 双通道DDR3内存,主控板上运行Linux操作系统。RK3288强大的处理能力与丰富的接口配置,极大增强了系统的鲁棒性与可扩展性。例如,当控制器需要增加无线上网的功能时,则只需在主控板上插入一个USB无线网卡,并加载相应驱动即可完成,而无需改进驱动板电路。

图2 系统硬件原理图
驱动电路设计采用了AtMega64作为核心,3个42线步进电机分别由3个A4988芯片驱动,AtMega64单片机采用时分复用原理同时输出3路PWM波实现对电机的实时控制。主控板在接收到用户指令后,通过UART接口将控制信号发送给驱动板,由驱动板控制机械臂运动。
3 上位机控制系统设计
3.1 系统控制框图
出于成本的考虑,采用的42线步进电机没有反馈功能,属于开环控制。另外,为改善机械臂的自动化程度,实现物体自动抓取功能,采用基于视觉反馈的闭环控制结构,其控制框图见图3。

图3 基于视觉反馈的闭环控制框图
用户指令决定抓取具体某一个物体后,系统通过摄像头采集机械臂末端位置信息以及目标物体,并通过目标物体识别模块识别机械臂末端位置信息xm及目标物体位置信息xo,目标物体识别模块根据识别到的位置误差Δx=xm-xo进行逆运动运算,得到机械臂各关节角期望的轨迹qd,最后通过PID控制器[14]输出力矩T,驱动机械臂各关节运动。
3.2 上位机软件设计
上位机控制系统是整体机械臂系统的核心,它需要完成用户交互、目标检测、关节空间轨迹跟踪、电机控制等功能。为提高软件的可移植性,基于QT框架开发了上位机控制系统。软件架构见图4。
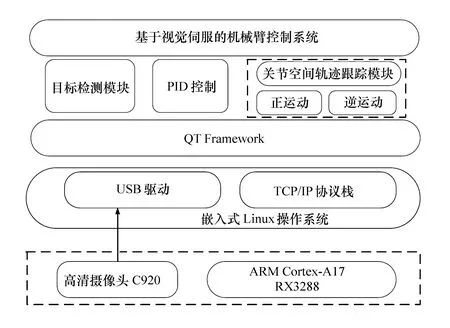
图4 机械臂控制系统软件架构
整个控制系统构建在嵌入式Linux操作系统之上。由于Linux系统集成了摄像头驱动,因此上位机软件通过open系统调用,可以很方便地获取摄像头采集到的图像信息。此外,应用层软件设计了目标检测、关节空间轨迹跟踪及PID控制等模块,以实现物体自动抓取功能。
为改善用户体验,控制系统还提供了触摸屏控制模式,用户通过点击屏幕,拉拽界面上机械臂各部分组件可实现机械臂的控制。控制软件界面见图5。

图5 控制器实物图
3.3 基于模板匹配的目标识别算法
在基于视觉伺服的机械臂控制系统中,准确检测目标物体位置是关键一环,本文的策略是在被抓取物体上打印文本或字母,以标识各个不同物体。
在具体实现上,采用QT+OpenCV框架,通过模板匹配[15-16]算法确定目标物体位置。具体实现思路是:先根据目标物体建立模板,采用隔行扫描的方式遍历整个图像;在遍历过程中以模板图像大小为模板匹配区域,采用标准方式匹配算法寻找与模板最为相似的图像区域,最终确定目标物体位置。标准方式匹配公式如下:
其中,R(x,y)表示在图像(x,y)相素所在的搜索框与目标物体的匹配度,R(x,y)值越小,则表示匹配度越高;(x′,y′)表示在模板中的图像像素坐标,T(x′,y′)表示模板中(x′,y′)位置的相素颜色信息;I(x+x′,y+y′)则表示实际采集图像相应位置上的颜色信息。
4 系统测试
本实验平台支持触摸屏控制模式,通过拖拽触摸屏上的机械臂模型,实现模型与机械臂的动作一致性控制。控制效果如图6。

图6 触摸屏控制实验
此外,物体自动抓取是本创新实验平台的一个重要功能。本平台首先通过3D打印机打印出若干骰子,在每个骰子的正面贴上具体的数字或字母,并将骰子置于机械臂的工作半径内;机械臂上方安装USB摄像头,用于捕获现场信息,具体实物图7,机械臂能够自动捕获目标物体位置,并将目标物体搬运到指定位置。

图7 物体自动抓取实验
为成功抓取物体,本实验平台采用气泵吸盘完成物体的抓取,用户只需在触摸屏上选择需要抓取物体的编号,即可自动抓取并放置在指定位置的功能。
5 结语
桌面型机械臂具有成本低、重量轻、占地面积小的优点。本文提出的基于视觉反馈的桌面型机械臂创新实验平台能够通过摄像头采集图像信息,并控制机械臂完成物体的自动抓取、放置等任务,具有趣味性强、控制效果好的优点。控制软件采用模块化设计,通过增加符合接口标准的模块可以方便增加新功能,非常适合创新实验教学。目前,该创新实验平台目前已应用于本校学科竞赛及“嵌入式Linux应用开发”等课程的综合类专业课程中,试用表明,该创新实验平台能有效调动学生的动手热情,提高了教学质量。
参考文献(References)
[1] 杨亮, 李文生, 傅瑜, 等. 基于ROS的机器人即时定位及地图构建创新实验平台研制[J]. 实验技术与管理, 2017,34(8):99-103.
[2] 黄元林,付成龙,王健美,等. 双足跑步机器人控制方法研究概述[J]. 机器人,2009,31(4):370-377.
[3] 杨亮, 李文生, 傅瑜, 等. 基于 3D 打印技术的桌面足球机器人比赛系统[J]. 实验室研究与探索,2016,35(12):65-68.
[4] 杨亮, 韩清涛, 李文生, 等. 基于3D打印技术的双足机器人创新实验平台[J]. 实验技术与管理, 2016,33(9):130-133.
[5] 周佳军, 姚锡凡. 先进制造技术与新工业革命[J]. 计算机集成制造系统, 2015,21(8):1963-1978.
[6] 梁学修. 工业机械臂交流伺服控制系统关键技术研究[D]. 北京:中国农业机械化科学研究院,2017.
[7] 吴爱华, 侯永峰, 杨秋波,等. 加快发展和建设新工科 主动适应和引领新经济[J]. 高等工程教育研究,2017(1):1-9.
[8] 林健. 面向未来的中国新工科建设[J]. 清华大学教育研究, 2017,38(2):26-35.
[9] 王麟琨, 徐德, 谭民. 机器人视觉伺服研究进展[J]. 机器人, 2004,26(3):277-282.
[10] 李优新, 毛宗源, 田联房. 基于图像矩与神经网络的机器人四自由度视觉伺服[J]. 控制理论与应用, 2009,26(10):1162-1166.
[11] 杨唐文, 高立宁, 阮秋琦,等. 移动双臂机械手系统协调操作的视觉伺服技术[J]. 控制理论与应用, 2015,32(1):69-74.
[12] 赵智勇, 王冬青. Dobot机器人运动学分析及建模仿真[J]. 青岛大学学报(工程技术版), 2017,32(1):52-57.
[13] 孙军, 张家亮, 马玲. Dobot 机械臂建模仿真与轨迹规划算法研究[J]. 机械与电子, 2016,34(6):72-75.
[14] 王佳伟, 杨亚非, 钱玉恒. 基于PID方法的控制力矩陀螺控制器设计[J]. 实验技术与管理, 2015,32(4):92-97.
[15] 呙润华, 苏婷婷, 马晓伟. BP神经网络联合模板匹配的车牌识别系统[J]. 清华大学学报(自然科学版), 2013(9):1221-1226.
[16] 冯春贵, 祝诗平, 王海军,等. 基于改进模板匹配的限速标志识别方法研究[J]. 西南大学学报(自然科学版), 2013,35(4):173-178.
