秸秆反应堆纵向可调开沟装置的研制
2018-06-05王泽河杨淑华袁永伟
王 永,王泽河,杨淑华,王 伟,袁永伟
(河北农业大学 机电工程学院,河北 保定 071001)
秸秆反应堆纵向可调开沟装置的研制
王 永,王泽河,杨淑华,王 伟,袁永伟
(河北农业大学 机电工程学院,河北 保定 071001)
开沟是秸秆生物反应堆种植作业的重要环节,目前其开沟主要是人工劳动或微耕机作业,人工挖掘填埋劳动强度大、工作效率低,微耕机开沟浅,需要多次作业,不能满足开沟工艺要求。为提高开沟效率,完成秸秆生物反应堆开沟农艺要求,设计制造了一种纵向可调旋转式开沟装置。该装置的开沟刀纵向旋转进行开沟,抛出的土由挡土板引导落在沟的两旁,调节伸缩杆长度控制开沟刀轴倾角,其具有开沟深度可调、开沟效果好、工作效率高及结构简单等特点。
秸秆反应堆;开沟装置;深度可调;模态分析
0 引言
秸秆生物反应堆技术是集生态、环保、经济等效益于一体的农业新技术,不仅能够解决农村大量剩余秸秆的再利用问题,而且能使设施蔬菜土壤的理化性质和生物学性质得到改善[1]。但是,在秸秆生物反应堆制作过程中,存在人工开沟及覆土环节劳动强度过大、生产率低等问题[2]。为此,设计出一种适合在温室内作业且满足农艺要求的开沟装置,以解决秸秆生物反应堆开沟问题。现有开沟机主要有铧式、螺旋式、圆盘式及链式4种开沟[3]方式。铧式犁开沟机结构笨重、功耗大,主要用于土壤坚实度低、开沟深度要求不高的果园[4];螺旋式开沟机运动缓慢、掉头难,主要用于山药开沟;圆盘式开沟机结构复杂、制造工艺要求高、效率低;链式开沟机刀片易磨损、体积大、功耗大,可以用于自来水管及地下电缆铺设等项工作的开沟作业,也可以用于植树造林[5]。从所查文献看来,开沟机大多为专用型(即针对性强),且现有的开沟机存在功耗大、笨重、转弯掉头不灵活及低矮环境操纵不方便等问题[6]。为满足葡萄园农艺要求,又要使装置小巧灵活,笔者设计了一种秸秆生物反应堆纵向可调旋转式开沟装置。
1 总体结构及主要技术指标
1.1 开沟装置结构
秸秆生物反应堆深度可调纵向旋转式开沟装置主要由机架、中间轴、开沟部件、伸缩杆及挡土托板等部分组成,其结构如图1所示。

1.六方管 2.开沟刀 3.刀套 4.刀轴 5.轴承座 6.中间轴 7.机架 8.球铰头 9.万向节头 10.伸缩杆 11托板 12.挡土板图1 秸秆反应堆纵向可调旋转式开沟装置结构Fig.1 Structure of straw reactor’s portrait ditching
device adjusted and rotating
其中,机架前端是三点悬挂点,与外部拖拉机连接;中间轴前端是花键,与万向节传动轴的接头通过花键连接,后端的万向节头与刀轴连接,中间轴与外部拖拉机后输出轴通过万向节传动轴连接;伸缩杆由球铰头、中间螺纹筒及螺母组成,旋转螺母调节伸缩杆长度;刀轴部件包括开沟刀、刀套、六方管及刀轴,刀轴方轴部分套有六方管,六方管上焊接刀套,刀套通过螺栓固定开沟刀;挡土托板由挡土板、托板、轴承座及连接杆等组成,挡土板有导向引流作用,托板起到固定的作用,通过调节伸缩板长度改变托板倾角,从而改变刀轴与中间轴夹角,实现深度可调。
1.2 开沟原理
开沟装置开沟作业时,拖拉机通过自带的后三点悬挂系统支撑开沟装置机架,拖拉机动力输出轴通过万向节传动轴连接开沟装置中间轴。从前进方向看,由于拖拉机动力输出轴顺时针转动,整个开沟装置传动轴均为顺时针旋转,开沟刀轴纵向顺时针旋转,右侧切土,左侧抛土,抛出来的土由挡土板导向落在沟的两边[7];调节伸缩杆的长度改变刀轴倾角,不仅可以实现开沟深度可调而且达到不同开沟抛土效果。考虑到万向节传动效率,万向节传动角度控制在15°以内,开沟装置机架水平放置时,中间轴与水平面夹角为30°。
1.3 技术参数
秸秆生物反应堆是开槽、菌种及有机肥均匀抛撒、填埋覆土及覆膜一体化的一项技术,其中开槽是消耗劳动力最大的部分。经过查阅文献和调研,确定了秸秆生物反应堆开沟的农艺要求,开沟深度和宽度各为400mm,沟与沟之间的中心距为800mm。针对秸秆生物反应堆的特点,结合相关行业标准,设计确定的开沟装置主要技术参数如表1所示。
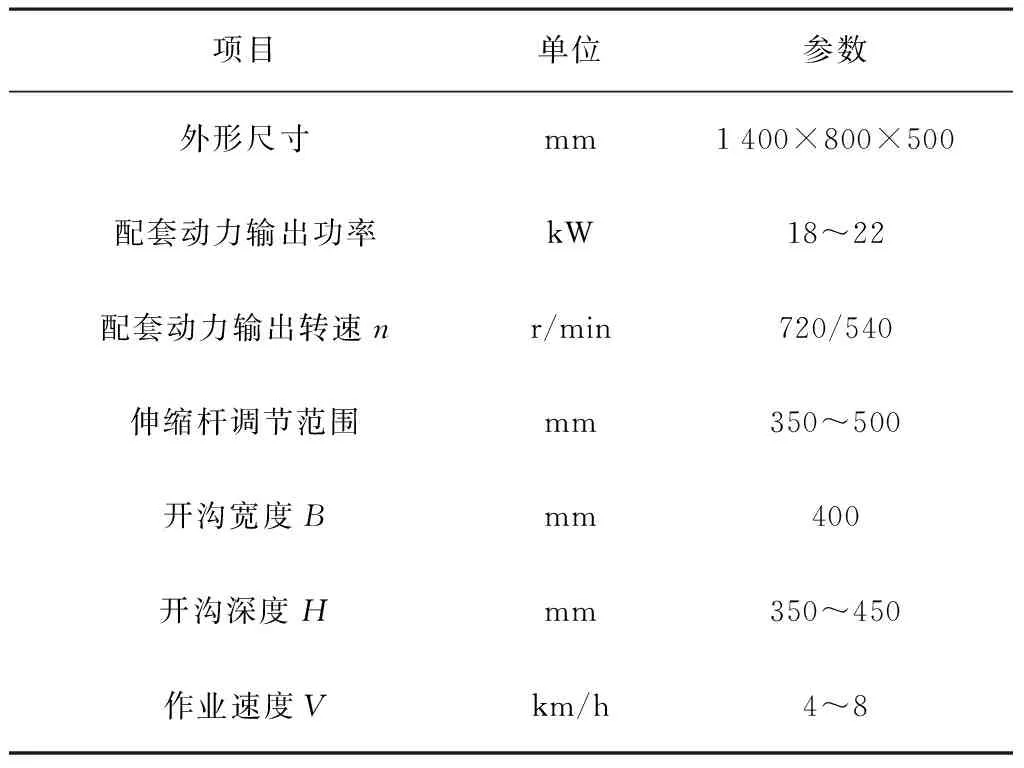
主要技术参数
2 关键部件的设计
2.1 传动轴
该开沟装置依靠拖拉机三点悬挂支撑,后输出轴通过万向节传动轴传递扭矩,万向节传递扭矩给中间轴,中间轴带动开沟刀轴旋转;考虑到传动效率,十字万向节传动角度控制在15°范围内。传动路线设计如图2所示。
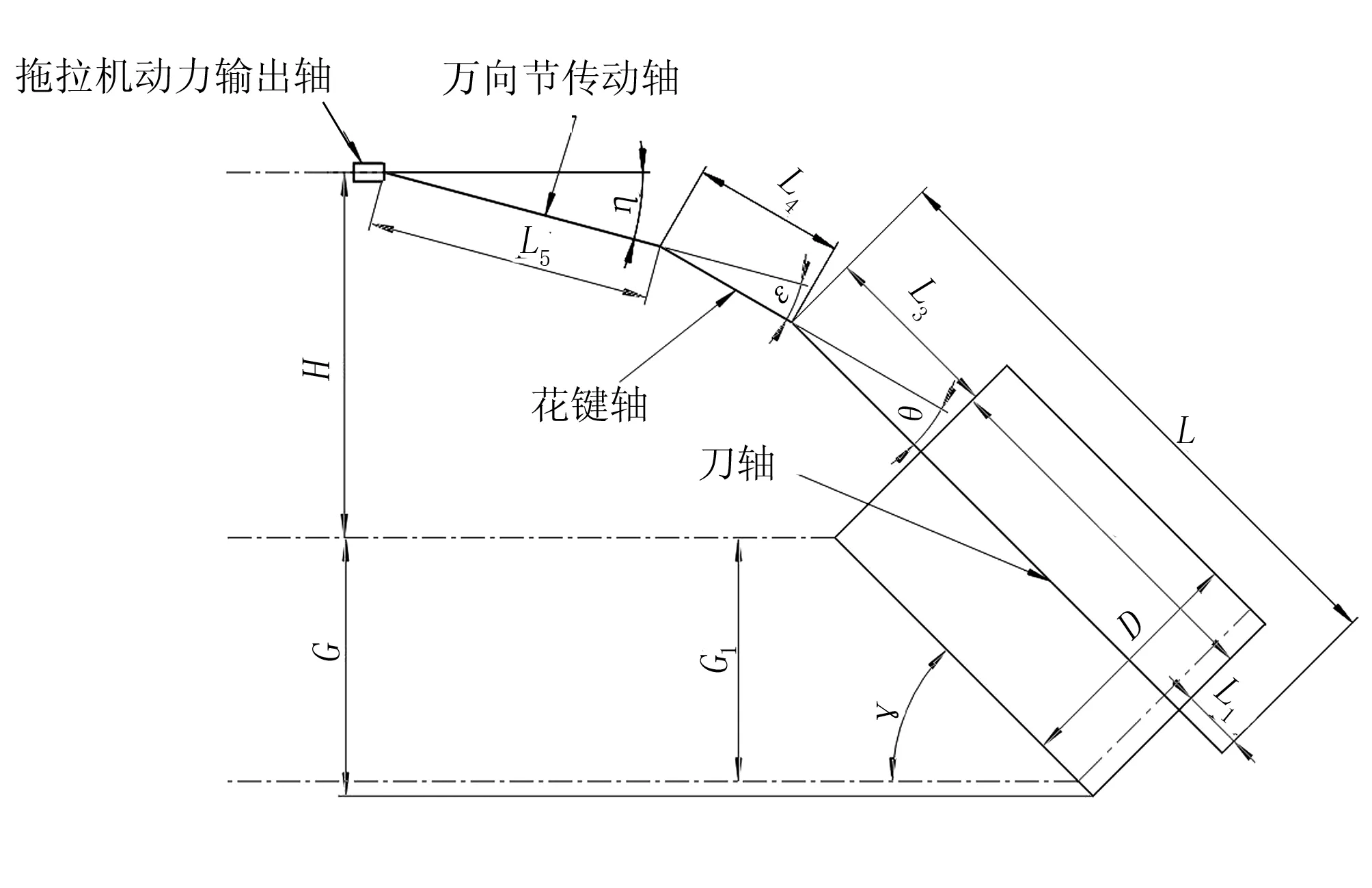
图2 传动路线简图Fig.2 Design of transmission route
图2中:H为拖拉机后输出轴离地高度;G为开沟离地实际深度;G1为开沟农艺要求深度,为400mm;D为开沟刀旋转直径;L为刀轴总长;L1为刀轴尾部轴长;L2为刀轴工作轴长;L3为刀轴支撑轴长;L4为中间轴长度;L5为万向节传动轴轴长,长度可调;η、ε、θ为万向节头夹角;γ为开沟刀轴与水平面夹角,大小为η、ε、θ总和。
总体尺寸满足
H+G=L5sinη+L4sin(η+ε)+
(L3+L2)sinγ+0.5Dcosγ
(1)
2.2 开沟部件
该开沟部件主要由开沟刀、刀套、六方管及刀轴组成。
由总体结构可知:三段万向接头,η、ε、θ控制在15°范围内,工作时三者均取最大值,即η=ε=θ=15°。秸秆生物反应堆开沟农艺要求开沟宽度为400mm,开沟宽度靠开沟旋转直径保证,可知开沟刀安装旋转直径D=400mm,则安装刀轴的六方管与水平面角度为
γmax=η+ε+θ=45°
(2)
(3)
考虑极值问题,六方管L2取整为600mm。 刀轴支撑部分越长,开沟刀整体变形越严重;但支撑轴越短,伸缩杆承施加的拉压力越大。考虑装置整体布局,L3设计为300mm,刀轴尾部支撑部分L1设计为100mm,可知刀轴总长L为1 000mm。
开沟刀片通过螺母安装在六方管的刀套上,考虑到刀轴因受力不均匀而引起的刀轴摆动,刀套对称焊接在六方管上,采用每圆周方向旋转60°、轴向增加90mm方式焊接在六方管上,共7组轴向对称刀套,14把开沟刀,具体布局如图3所示。

1.六方管 2.开沟刀 3.刀轴 4.刀套图3 开沟部件结构Fig.3 Structure of trenching part
2.3 挡土托板
挡土托板主要由挡土板、托板、轴承座及连接杆等组成,如图4所示。托板支撑着刀轴,抛出来的土由挡土板导向落在沟的两边。图4中K为托板两对称支撑部分夹角,K越大,托板左右摆动越剧烈,伸缩杆强度要求越高;K越小,调节倾角对应的伸缩杆长度变化越大。综上所述,K设计为120°;挡土托板整体长度尺寸近似等于刀轴长度,即1 000mm。

1.挡土板 2.连接架 3.托板 4.前轴承座 4.后轴承座图4 挡土托板结构图Fig.4 Structure of retaining and supporting plate
2.4 伸缩杆
伸缩杆主要由球铰头、中间螺纹筒及螺母组成,如图5所示。通过旋动螺纹调节螺母相对球铰头的位置,从而改变伸缩杆的长度;伸缩杆长度改变引起刀轴倾角发生改变,倾角的变化不仅能改变开沟深度,而且能够改变开沟抛土方向,从而实现不同开沟效果。
伸缩杆的尺寸对调节角度有很大的影响。工作状态时,取θ=15°时, 为使得伸缩杆施加给托板的有效压力更大,伸缩杆通过已知托板上的球铰点的垂线,与已知机架面的相交点就是伸缩杆另一球铰点,两端球铰点位置确定;当θ=15°时,计算得两球铰点距离为502mm;当θ=-15°时,两端点距离为346mm,即伸缩杆调节范围约为350~500mm。

1.球铰头 2.螺母 3.中间螺纹筒 4.工艺孔图5 伸缩杆结构图Fig.5 Structure of telescopic lever
3 开沟装置受力分析
刀轴和挡土托板是开沟装置的重要部分,易损坏,因此对刀轴和挡土板进行受力分析很有必要。取刀轴和托板为一整体,进行受力分析。已知中间轴通过万向接头花键连接刀轴前端传递扭矩,刀轴旋转完成切土、抛土;土壤对开沟刀施加阻力同时左右伸缩杆对托板进行压紧支撑,完成开沟作业。开沟装置主要是通过刀轴的扭矩进行开沟作业,取刀轴截面为XY平面并进行受力分析,刀轴和挡土托板整体受力情况如图6和图7所示。开沟装置工作时(即在xy平面上稳定工作)的受力平衡条件为
Qsinγcosα+Psinγcosα-Gcosω-Fcosζ=0
(4)
Qsinγsinα-Psinγsinα-Fsinζ=0
(5)
M+QL1sinλcosβ-PL1sinλcosβ-FL2=0
(6)
其中,M为中间轴施加给刀轴的扭矩;P为右伸缩杆施加给托板的压力;Pxy为右伸缩杆在刀轴截面施加的分力,且Pxy=Psinγ;Q为左伸缩杆施加给托板的压力;Qxy为伸缩杆在刀轴截面施加的投影力,且Qxy=Qsinγ;F为完成开沟作业土壤等效阻力;ζ为F与Y轴等效夹角;L2为刀轴轴心到F的等效距离,且F、ζ、L2已知,与开沟土壤的土质疏松程度、开沟深度及接触面积等有关;G为挡土托板和刀轴部件的整体重力;Gy为重力G在Y轴方向的分力,且Gy=Gcosω;λ为伸缩杆与刀轴夹角;α为XY平面内伸缩杆与Y轴夹角;β为XY平面内伸缩杆托板垂直面夹角;δ为托板左右支撑面夹角,且α+β+δ=90°。

图6 xy 平面上受力图Fig.6 Force diagram on xy plane
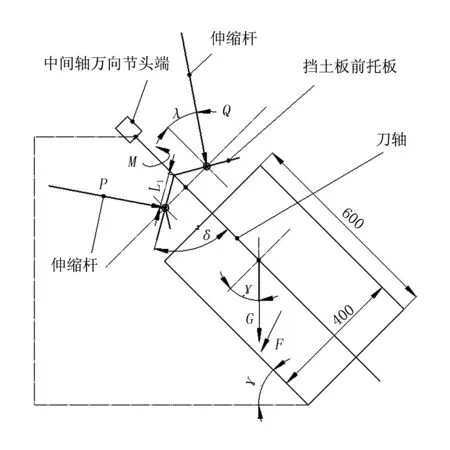
图7 空间上受力图Fig.7 Force diagram on space
经过简化计算得
(7)
(8)
(9)
由式(7)、式(8)知:伸缩杆所施加的压力P、Q与sinλ成反比。已知,伸缩杆施加压力越小,承受能力越强,使得P、Q最小时,λ=90°,即伸缩杆与托板支撑板垂直,在整个施加压力过程中,应满足Q≤Qmax、P≤Pmax。其中,Qmax、Pmax是左右伸缩杆的施加最大压力,与伸缩杆本身材料、结构等有关;当Q>Qmax或P>Pmax时,伸缩杆发生压溃。
万向节施加给刀轴的扭矩为M,其大小与拖拉机动力输出功率有关,实验用的拖拉机动力输出功率P为22kW,动力输出转速N为500/720(r/min),可知
(10)
当开沟土壤的土质疏松程度、开沟深度及抛土角度等确定后,等效F、ζ、L2均为已知,经过公式(10)可计算得出M。当M大于Mmax时,超出拖拉机动力允许最大功率,开沟不能完成,易引起开沟装置损坏。秸秆生物反应堆开沟是在经过了一次旋耕作业后的基础上进行作业,上层土壤进行旋耕后土质疏松,所以等效的F、ζ、L2相比硬质土壤较小,由式(7)~式(9)可知Q、P、M变小,安全系数变大,伸缩杆和拖拉机功率的可靠性增加。
4 模态分析
运用 ANSYS Workbench 软件对开沟装置进行模态分析,可有效避免共振或谐振。由于开沟装置结构比较复杂,所以首先通过SolidWorks软件建立开沟装置的三维模型,保存为 .SAT 格式;然后直接通过SolidWorks与ANSYS Workbench 的接口导入 ANSYS Workbench 平台中,进行开沟装置的模态分析[8]。
首先该装置整体SolidWorks建模。建模过程中,为降低对计算机硬件的配置要求,减少计算量和求解时间,对开沟装置的部分倒角圆角等结构进行简化,保存模型为 .SAT 格式,通过SolidWorks与ANSYS Workbench 的接口导入 ANSYS Workbench平台中[9]。
在ANSYS Workbench中,首先对材料进行定义,该开沟装置的材料定义为普通碳钢;接下来就是网格划分,其步骤主要分为定义单元属性、定义网格密度控制和网格划分[10],结果如图8所示。

图8 开沟装置网格划分图Fig.8 Meshed ditching device
在该分析中,选择的单元类型是 Solid20node186,并且采用的是智能划分网格。最后,进行运行结果,得到6阶振型和共振频率。一阶振型图如图9所示,其他阵型不再赘述。

图9 1阶模态阵型Fig.9 First modal shape
根据频率与转速的公式,则
n=60f
其中,f表示频率(Hz);n表示转速(r/min)[11]。
开沟装置的临界转速如表2所示。

表2 开沟装置临阶转速
表2表明:1阶固有频率对应的转速为1 448r/min,即开沟装置的临界转速;而此开沟装置的工作转速最大为720r/min,1阶临界转速远高于最大工作转速。所以,该开沟装置的工作转速是安全的,不会有共振现象发生。
5 结论
通过调研与查阅相关文献进行分析,为满足国内的大多数地区的秸秆生物反应堆开沟农艺,设计了秸秆反应堆纵向可调开沟装置,并确定使用已有的拖拉机动力输出轴作为动力,拖拉机通过后三点悬挂进行
固定支撑,以刀轴部件、挡土托板及伸缩杆作为主要部件对秸秆反应堆进行开沟。开沟部件满足开沟农艺要求,且具有很高的通用性。通过对伸缩杆的理论计算,确定出与开沟深度相匹配的伸缩杆调节范围,并对开沟装置进行模态分析,有效地避免了共振现象的发生。
相比于已有的开沟装置,本文所设计的秸秆反应堆纵向可调开沟装置通过调节伸缩杆,开沟深度及抛土方向可调;渐进式抛土开沟深,动力需求小;无齿轮等磨损件的加入,装置寿命长;结构简单,成本低。因此,秸秆反应堆开沟装置具有很大的应用前景和发展潜力,但在整个装置中个别零部件处需进一步的改进,整机需要进一步的试验分析。
[1] 王晶,李春丰,孟宪国.蔬菜大棚外置式秸秆生物反应堆技术应用[J].吉林农业:学术版,2012(9):122.
[2] 樊禹铭,张旭.棚室开沟机的推广应用与效益分析[J].农业科技与装备,2012(12):72-73.
[3] 朝海,段洁利,闫国琦,等.果园开沟机研究现状与发展对策[J].现代农业装备,2013(2):64-68.
[4] 一机部机械院农机所耕作组.国外开沟机的发展情况[J].粮食加工与食品机械,1973(4):4-12.
[5] 覃国良.链式开沟机刀具设计及其切削过程的数值模拟[D].武汉: 华中农业大学,2009.
[6] 张琦,王伟,廖结安.国内外果园施肥开沟机的研究现状[J].农机化研究,2016,38(5):264-266.
[7] 郜宁.纵向旋转式果树开沟机的研制[J].新疆农机化,2014,37(3):24-25.
[8 ] 吕中界,李屹,尹健,等.闭式脱粒滚筒的静动态性能分析[J].农机化研究,2015,37(4):44-47.
[9] 肖星星,李骅,齐新丹,等.基于ANSYS Workbench脱粒滚筒的模态和瞬态分析[J].农机化研究,2016,38(8):46-50.
[10] 邢静中,李军.ANSYS的建模方法和网格划分[J].中国水运:学术版,2006(9):116-118.
[11] 刘向晖,刘俊峰,李建平,等.圆盘式果园开沟机刀盘作业模态分析[J].农机化研究,2016,38(6):102-115.
ID:1003-188X(2018)02-0136-EA
Development of a Straw Reactor’s Portrait Ditching Device Adjusted and Rotating
Wang Yong, Wang Zehe,Yang Shuhua,Wang Wei, Yuan Yongwei
(Mechanic and Electronics College, Agriculture University of Hebei, Baoding 071001, China)
Abstract: Ditching is an important part of the straw biological reactor for planting. Currently ,the straw biological reactor for planting is completed by manual operations or tillers. Manual operations result in low efficiency and labor intensity. Tillers result in not only shallow ditch but also more operations for completing the task. To improve efficiency and complete the task. I designed a straw reactor’s portrait ditching device adjusted and rotating .Whose ditching knife is rotating and throwing soil which fall to ground on both sides by retaining plate. The angle of ditching knife axle is changed by adjusting the size of telescopic lever. This device not only complete different deep ditches, but also work well, simple construction and high efficiency.
straw biological reactor; ditching device; adjusted depth; modal analysis
2016-12-13
河北省科技支撑计划项目(15227209D)
王 永(1989-),男,河南商丘人,硕士研究生,(E-mail)15236283359@163.com。
王泽河(1969-),男,山东临清人,教授,(E-mail)wzhcau@163.com。
S222.5+2
A
1003-188X(2018)02-0136-05
