基于GPS返航的旋翼无人机飞控系统的研究
2018-06-04韩梅阳俊曹冲张小春寇剑峰湖南城市学院信息与电子工程学院
韩梅 阳俊 曹冲 张小春 寇剑峰 湖南城市学院信息与电子工程学院
引言:近年来,随着新材料、新能源、以及飞行控制技术、微电子技术、微惯导技术和传感器技术的快速发展使得四旋翼飞行器在无人机领域获得新生。近年全球无人机市场迎来广泛关注,大疆创新产品走向前台,国内极飞科技、零度智控以及国外3D Robotics等无人机公司产品和融资动作不断。如何将它变得越来越智能将是我们不懈的追求,而现今四旋翼飞行器多依赖于手动遥控,我们思考通过自主避障与GPS导航来解决其自主飞行问题,令其变得更加智能,更符合现代发展潮流。
1 硬件系统
飞行控制板采用STM32F103C8T6为主控芯片,集成MPU6050三轴陀螺仪和加速度计,添加蓝牙模块,可通过安卓手机测试。其余一些必须配件如下:朗宇无刷电机马达,980KV;天地飞2.4G,6通道接收机;好盈天行者,30A无刷电调;蝎子3S锂电池,11.1V 2200mah 30C。
1.1 MPU6050传感器
MPU-6050 它集成了三轴MEMS陀螺仪,三轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力传感器。扩展之后就可以通过其I2C 或SPI 接口输出一个9 轴的信号(SPI 接口仅在MPU-6000 可用)。
1.2 GPS模块
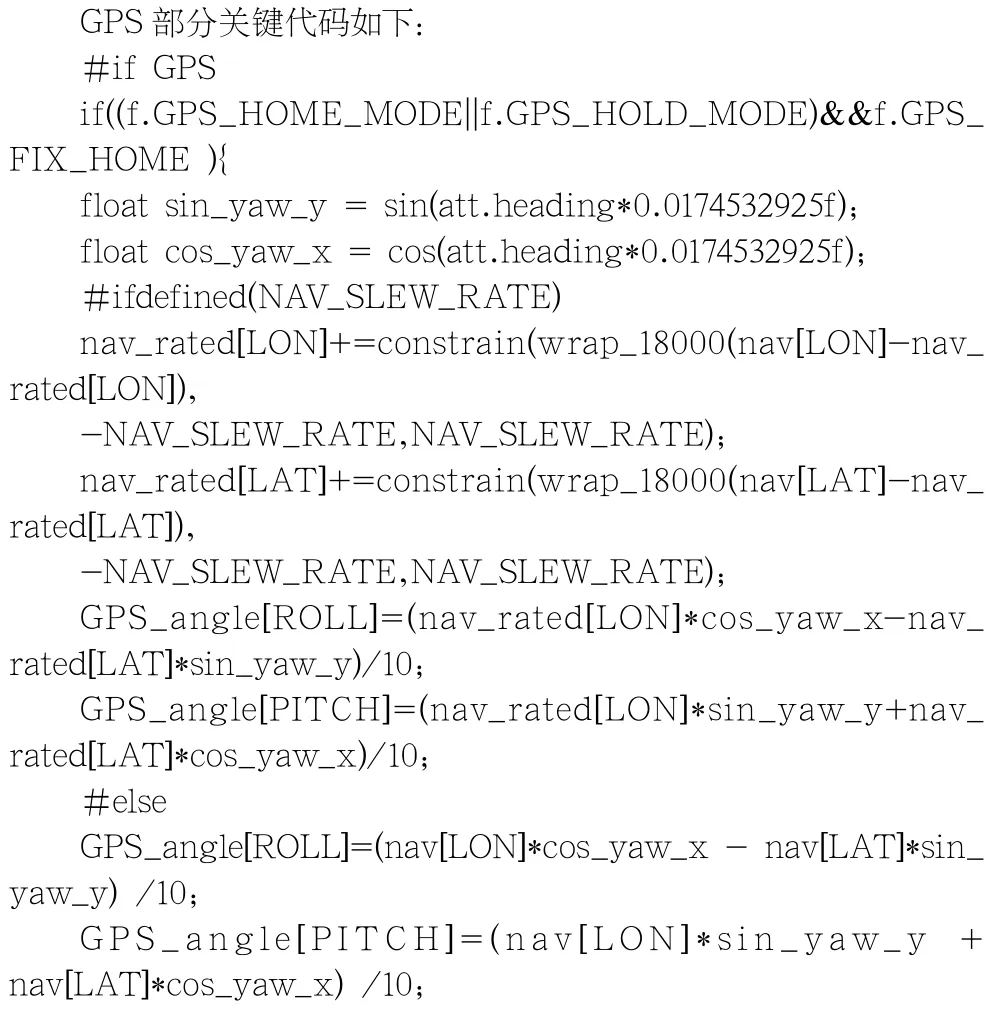
四旋翼飞行器添加了GPS模块,为了提高飞行器精度和实现地图航线规划显示,同时GPS与三轴磁强计配合,能完成GPS HOME(自动返航)功能。本系统采用的GY-GPS6MV2是是一款高性能GPS定位模块。该模块采用U-BLOX NEO-6M模组,模块自带高性能无源陶瓷天线,并自带可充电后备电池(以支持温启动或热启动,后备电池在主电源断电后,可以维持半小时左右的GPS接收数据保存)。
2 软件系统
MWC是Multiwii Copter的缩写,Multiwii是控制多旋翼航模的开源固件。Multiwii最初由法国航模爱好者Alex创立,用于控制他自己做的三轴飞行器。后经改造扩展,现在Multiwii不仅仅支持三轴飞行器、四轴、六轴等多轴系列,还支持固定翼和直升机等航模。本系统采用Multiwii开源固件进行开发。
2.1 算法浅析
飞控主要算法是滤波算法、姿态算法和PID算法。滤波算法主要是将获取到的陀螺仪和加速度计的数据进行去噪声及融合,得出正确的角度数据。PID算法就是用来控制四个电机的转速来纠正欧拉角,从而使机身保持平稳。

3 系统测试及分析
飞行器的飞行测试主要测试的是飞行器能否自主起飞和在空中保持平稳的飞行姿态,最后可以实现飞行的自主降落。试验中发现,飞行器的姿态控制,其俯仰角度与横滚角度的控制误差可以保持在5°以内,但能通过飞控自动调节回来;对于位置位移的控制,水平高度误差可以保持1m以内,但是垂直位移则出现2~5m的误差。经分析,气压计定高在低空效果不佳,其温漂导致测量精度与准确度大大下降,使得控制器性能大大降低;位置位移的控制,垂直高度由空气高度传感器测量,可以达到比较高的精确度。
4 总结
本文作为四旋翼飞行器创新项目的一部分,首先对四旋翼飞行器飞行原理进行研究。在此的基础之上设计飞行控制及GPS返航和验证它的实验平台。本系统对四旋翼飞行器的姿态控制算法做了研究,在硬件平台上实现飞行器自主的姿态控制和增稳,并完成了自主返回目的地的目标。
[1]王守亮;基于蓝牙多旋翼微飞行器通信与控制的研究与实现[D],硕士学位论文,上海,上海交通大学,2005.
[2]王倩.基于GIS的电子导航图和任务规划[D].西安:西北工业大学硕士论文.2007.3
[3]王东平.基于嵌入式的四轴飞行器控制系统研究与设计[D].泉州:华侨大学,2013.
