电动执行机构手切换的设计与研究
2018-06-03郑源源
范 勇,蔡 军,郑源源
(扬州电力设备修造厂有限公司,江苏扬州 225003)
0 引言
电动执行机构是一种对开环/闭环控制系统中各类电动阀门的驱动装置,用以对阀门的开启、关闭以及自动控制。电动执行机构一般由电机、机械传动部件、手动部件、手切换部件、电控组件等组成,其工作原理为电控组件接收外部控制信号,使电机输出动力,通过蜗轮蜗杆及离合器将动力传至输出轴,从而达到控制阀门的目的,同时,当需要手动时,通过手切换部件中的切换手柄进行手-电动切换,再利用手动部件对阀门进行开关等控制;当电动时,电机转动,手切换自动复位。综上所述,手切换部件是电动执行机构重要的组成部分,其功能的可靠性、稳定性,操作简单、省力等对电动执行机构整机性能有着至关重要的作用。本文设计了一种手切换结构,其性能稳定、操作简单、省力。
1 总体结构设计及工作原理
1.1 总体设计
由于手切换功能的特殊性,其必须具有手柄结构、复位功能、锁定功能(电动或手动状态)、手动转电动时自动实现等特性。
本文设计的框架手切换结构使用的电动执行机构参数为:
额定转矩:1200 N·m;
输出转速:40 r/min;
运动方式:多回转。
本文设计手切换结构包括框架结构、切换块结构、手柄结构,如图1所示。
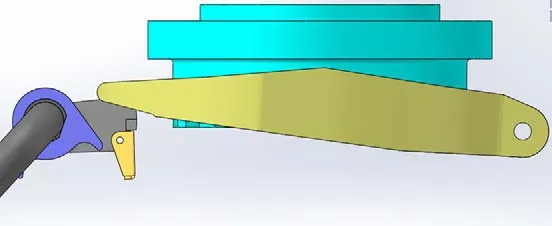
图1 框架式手切换结构
1.2 工作原理
正常情况下,电动执行机构为电动状态,手切换处于复位状态。当调试、发生事故或断电等情况需要手动时,给手柄施加转矩,切换块发生旋转运动,将框架一端向上运动,框架将离合器向上抬升,最终与手轮部件连接,从而使离合器和蜗轮的连接脱离,达到手动操作电动执行机构的目的;当恢复电力时,电机旋转运动,带动蜗轮,导致直立杆倒下,使切换块、框架、离合器迅速复位,离合器与手动部件分离,同时与蜗轮啮合,从而带动输出轴转动,转换为电动状态,并锁定电动状态。
2 三维建模和受力分析
为了校核切换相关零件的强度,必须先对切换整体结构进行受力分析。受力图如图2所示。
其中,蜗轮圆周力
蜗轮与离合器齿间摩擦力Ff=f·Ft1

图2 切换结构受力分析图
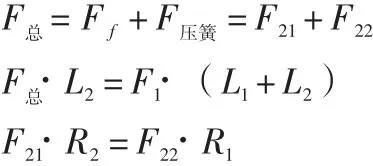
2.1 框架受力分析
对框架单独进行受力分析(见图3、图4),经过计算得出压簧的挤压力为0.2 kN,另有:
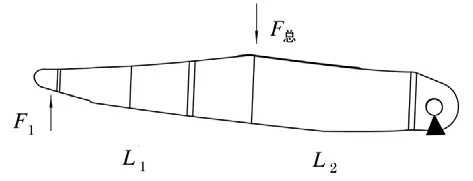
图3 框架受力分析正视图
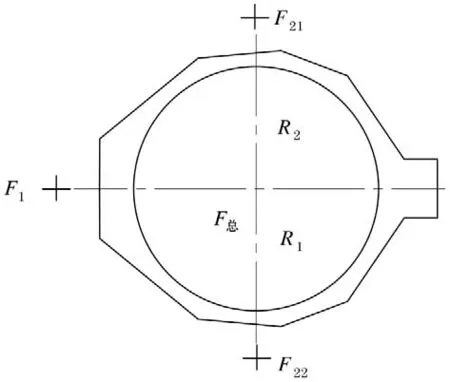
图4 框架受力分析正视图
使用上述理论受力分析所得F1、F21、F22的结果,利用仿真模拟软件进行有限元分析。为保证较高的计算精度,设定较小的单元尺寸,所得模型节点数为289255,单元数为170144,根据理论受力分析,施加线载荷F1、F21、F22,并在销轴孔处施加固定约束,计算所得应力云图及变形云图5(a)和(b)所示。

图5
由应力云图可见,应力最大值为214 MPa,出现在离合器与切换框架接触挤压处,切换块与切换框架接触位置出现应力集中。
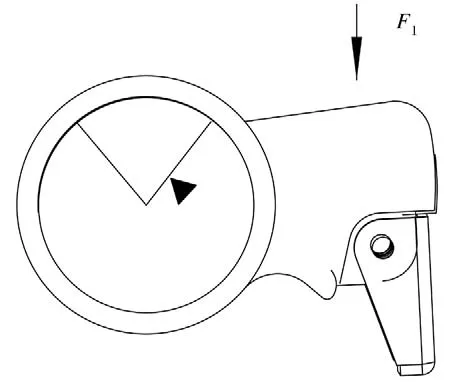
图6 切换块受力分析图
2.2 切换块受力分析
对切换块单独进行受力分析,有F1'=F1。受力分析图如图6所示。
将切换块三维模型导入仿真软件,划分网格,所得节点数为74200,单元数为43164,施加线载荷F1,并在切换块内侧与切换轴配合处施加固定约束,计算所得应力云图及变形云图如图7(a)和(b)所示。
由切换块应力云图及变形云图可见,应力及变形的最大值均出现在切换块顶部与切换框架接触位置,且应力最大值为185 MPa。
综上所述,通过以上有限元分析结果可以找出应力较大区域,相应的根据情况进行加固,对结构设计及材料选择具有辅助作用。
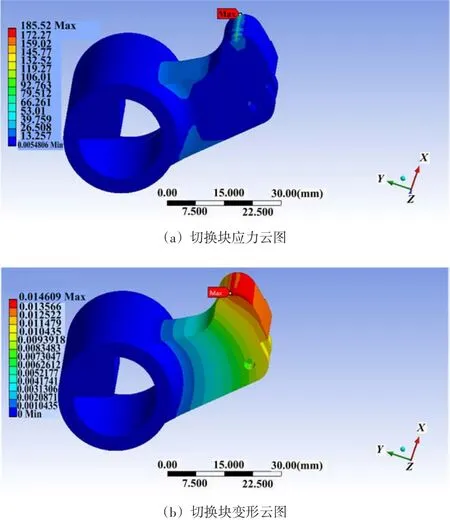
图7
3 结果与验证
3.1 样机试制
根据设计结果,对相关零件进行生产制造,其部件实物图如图8所示。

图8 框架式手切换结构实物图
3.2 试验验证
为了验证设计的合理性及该框架结构的稳定型和可靠型,对该切换结构进行试验验证。
根据DL/T641的要求,对本文设计的框架式手切换结构进行手-电动切换可靠性试验和切换力试验,应具备空载试验和加载试验两种:空载切换,将电动执行机构从电动状态切换至手动状态,转动手轮正反方向不少于一圈,电动执行机构使输出轴正反方向转动不少于一圈,各重复三次;加载切换,将电动执行机构安装在试验台上,分别调整开关方向的控制转矩为最小控制转矩,启动电动执行机构逐渐加载直至转矩机构动作,停止后不卸载,重复上述空载切换的试验步骤。试验的过程中在切换手柄上安装力矩扳手,测试并记录每次的切换力矩值,试验结果如图9所示。
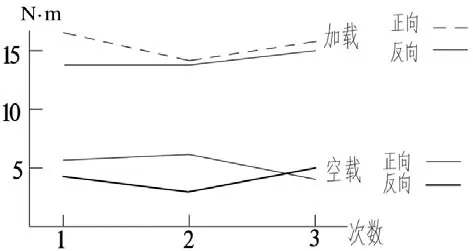
图9 切换力结果
试验过程中切换平稳灵活可靠,手-电动状态完全分离,同时切换力较小,符合设计要求。
4 结论
手切换结构的设计是整个电动执行机构设计过程非常重要的一个环节,其性能直接影响整个电动执行机构的性能。为了提高电动执行机构手切换的稳定性、可靠性和省力的目的,本文设计一种手切换结构,设计过程中,通过利用三维模型和有限元分析软件对相关零件进行优化设计,最后通过试验验证,证明该手切换结构性能稳定可靠并省力,符合整个电动执行机构的设计要求。
[1]成大先.机械设计手册:第四版第3卷[M].北京:化学工业出版社,2003.
[2]徐声云,汤占峰,周祥态,等.超(超)临界阀门电动执行机构大推力输出装置的研究[J].电力通用机械,2015,43(6):169-171.
[3]郭庆,吴珍,朱政,等.一种核级阀门电动执行机构的寿命试验[J].通用机械,2015(2):66-68.
[4]王召垒.电动执行机构发展趋势研究[J].机械工程与自动化,2015(6):225-226.
[5]陈愫珠.浅谈电动执行机构在火电厂的应用[J].科技与创新,2014(5):1-2.
[6]周小林,白万民.基于ANSYS WORKBENCH的某型装置的有限元分析[J].机电产品开发与创新,2010(3):89-90.
