智能型光学玻璃切割机机械机构设计与实验研究*
2018-06-03魏加争
魏加争
(中山职业技术学院,广东中山 528400)
0 引言
光学玻璃在数码相机、数码摄像机、智能手机等新兴光电信息产品中有着广泛的应用。成品光学元件由企业根据市场技术要求,将分割成条状的毛坯光学玻璃再切割成0.1~40 g的块状玻璃,通过压铸模工艺将块状玻璃压铸成所需的形状。由于这些器件尺寸较小,加之光学玻璃本身价格昂贵,对其切割技术要求很高。目前国内大多数厂家对光学玻璃的分块切割主要是依靠人工操作,造成废品率高、安全性低、效率低等问题,这些问题直接制约企业的快速发展。因此,光学玻璃块状自动切割装备研制显得尤为重要。
本研究提出了一种智能型光学玻璃切割机的机构设计方案,结构简单,制造费用低,生产率高。
1 总体方案设计
1.1 机械结构设计原则
根据光学玻璃脆断条件和切割技术要求,确保设备各功能机构与光学玻璃加工工艺,协调、高效、稳定工作。设计设备应遵循以下设计原则:
①高度自动化,操作简单,工作效率高;
②设备制造、安装及维护成本低;
③机构运动无干涉,故障率低;
④产品加工精度高,加工工艺性好。
1.2 机械机构总体设计
本项目设计目标:将人工堆放在物料板上的条状光学玻璃,自动完成取料、切割工作。由此将整个机械结构系统分为取料机构、送料机构和切割机构三大部分,为顺利实现以上功能,又将取料机构细分为举升机构、抓取机构、姿态调整机构和侧压机构。设备的整体机械机构结构如图1所示。
1.3 机械机构工作原理
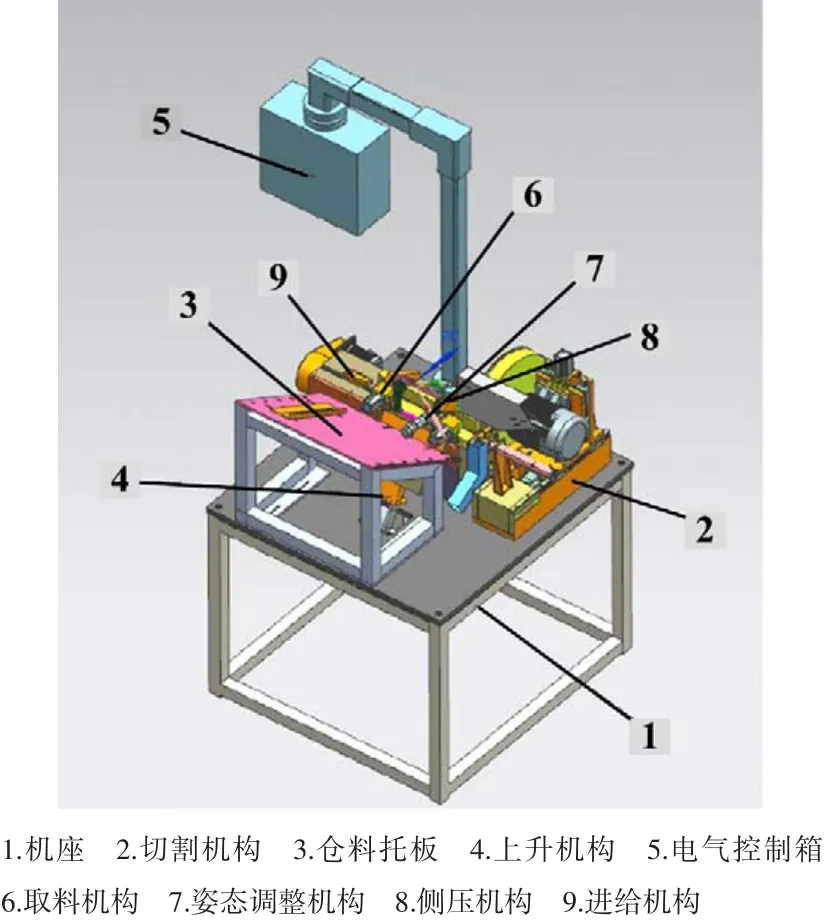
图1 光学玻璃切割机结构示意图
上升机构将仓料托板上的条状光学玻璃抬起,取料机构对条状光学玻璃进行夹取,姿态调整机构进行条状玻璃翻转,调整成水平状态,然后侧压机构将条状玻璃放置到送料导向基座上,在控制系统精确控制下由送料机构完成精准进料,最后由切割机构完成条状玻璃切割。
2 设备主要机械机构设计
2.1 上升机械机构设计
将摆放在仓料托板上的条状玻璃顺序抓取进行切割,首先将码放在倾斜物料托板上整齐的玻璃条分离。上升机构执行元件为气缸,气缸杆外伸上升块将条状玻璃抬起,取料机构夹住,气缸回退,倾斜仓料托板上的光学玻璃条在重力的作用下依次下滑到上升块的上方位置,等待下一次循环上料。上升机构示意图如图2所示。
2.2 取料机械机构设计
取料机构的作用是把上升机构抬起的玻璃条抓住,当被举升的玻璃条位于抓取基座与抓取爪之间,抓取气缸在控制系统的控制下伸出运动,带动抓取座向固定的抓取爪方向移动,抓取座与抓取爪距离变小,进而将玻璃条抓取;抓取座与基座之间用燕尾槽结构配合联接,气缸杆与燕尾滑块螺纹联结,保证了运动顺畅平稳,燕尾槽结构保证了抓取座与抓取爪之间的角度保持90°,抓取座与抓取爪表面黏敷一层橡胶,确保玻璃条棱边不会被气缸冲击损坏。取料机构示意图如图3所示。
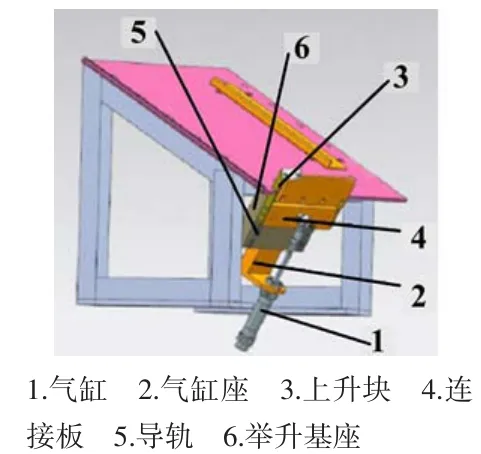
图2 上升机构示意图
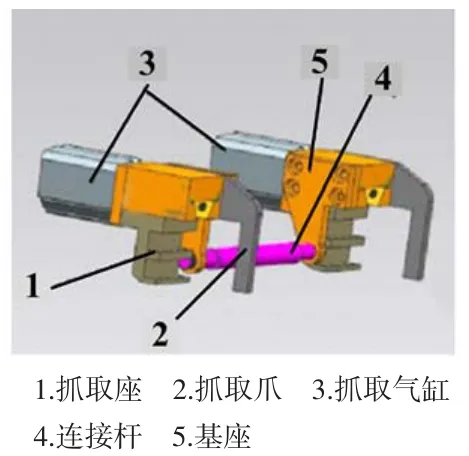
图3 取料机构示意图
2.3 姿态调整机构设计
在上升机构中为了实现玻璃条在自重力作用下移动到上升块上方位置进行自动上料功能,设计仓料托板与玻璃条放置导轨呈40°夹角,因此玻璃条被取料机构抓取后不再是水平姿态而是倾斜的;所以需将条状玻璃进行角度翻转成水平姿态,再将玻璃条放到玻璃条送料轨道上。姿态调整机构示意图如图4所示。
姿态调整机构的动力元件是翻转气缸,翻转气缸通过气缸基座与铰链连接板固定,两个铰链连接板与连接板基座固定,翻转臂与连接杆通过顶紧螺钉锁止相对转动,连接杆两端通过键联接与抓取机构相连,保证姿态调整机构随着连接杆转动。取料机构将玻璃条夹取,翻转气缸在控制系统的作用下,翻转气缸外伸,实现翻转臂绕着连接杆转动,连接杆带动抓取机构转动,调整玻璃条成水平姿态。
2.4 侧压机构设计
侧压机构组成:成平行状态的两个侧压导轨座与送料导向基座固定,侧压导轨安装在侧压导轨座上,姿态调整机构铰链连接板通过滑块与侧压导轨滑动连接,侧压气缸与侧压导轨座固定,侧压气缸杆与姿态调整机构铰链连接板固定连接。侧压机构的功能是:将姿态调整机构调整至水平的玻璃条,从一侧压向送料导向座方向,将条状玻璃稳定在送料导向座上,为玻璃条精准送料做好准备。侧压机构的结构如图5所示。
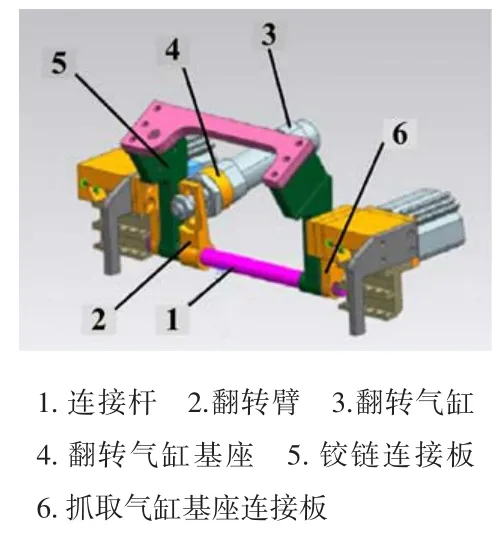
图4 姿态调整机构示意图
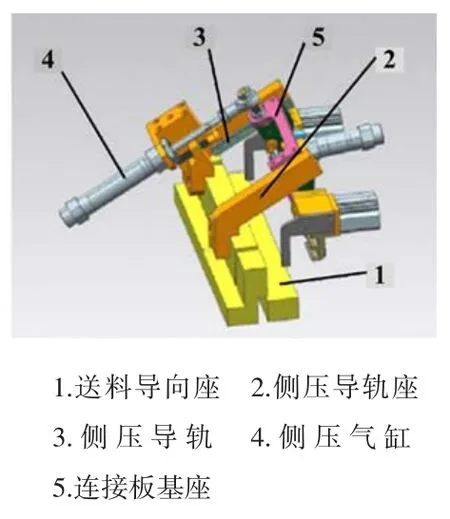
图5 侧压机构示意图
2.5 进给机械机构设计
进给机构是光学玻璃切割机的核心机构。进给机构的设计精度高低直接影响着光学玻璃切割体积的精度大小,所以进给机构的进给距离要精准,实现精准控制。因此,送料机构的驱动选用伺服电机,通过同步带与减速器连接,减速器与丝杠连接,在控制系统的控制下进行精准传动。
送料机构的主要组成包括:丝杠基座、送料导向座、送料块、丝杠、滑动线轨、伺服电机、减速器等。进给机构的示意图如图6所示。
2.6 切割机构设计
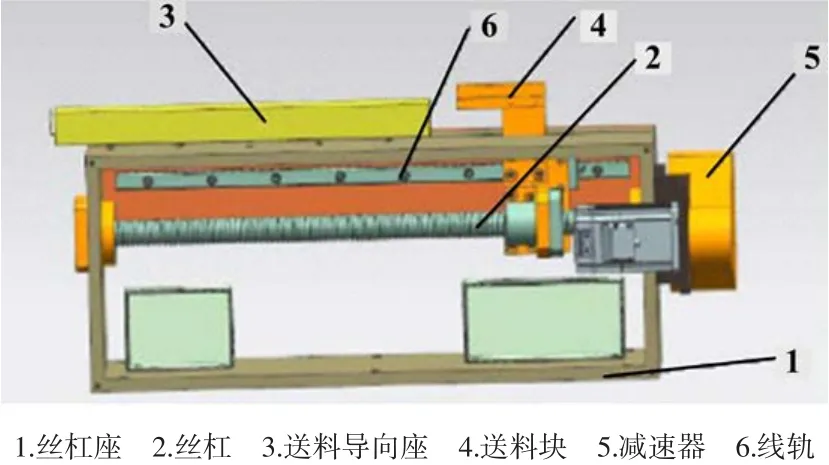
图6 进给机构示意图
切割机构是光学玻璃切割机的核心机构。光学玻璃条由送料机构送到送料导向座上,由视觉机器人控制系统自动计重进行切割,切割机构在伺服电机的控制下进行切割进给,切割过程中,传感器和刀具同时接触到光学玻璃,当光学玻璃切断时,传感器在压缩弹簧力的作用下复位,同时向控制系统发送停止、及反转信号,伺服电机停止进给并反转带动滑动基板回退至初始位置,准备进行下一次光学玻璃送料。为了保证光学玻璃断面的平整度,在设备结构装配时应精准控制刀具的径向方向与进刀方向的平行度,及进刀方向与玻璃条的垂直度。
切割机构是由切割电机、刀盘、十字滑台及进给电机组成。切割的进给运动进刀和退刀是通过一个立式滑动基板连接到立式底座上,立式滑动基板的动力元件是一个伺服电机,通过滚珠丝杠驱动实现刀盘电机上下运动。立式底座与水平滑动基板固定连接,水平滑动基板通过线轨与底座连接,伺服电机通过减速器与滚珠丝杠连接驱动平滑动基板左右运动。最终带动切割刀盘能够实现上下、水平方向上往复移动切割。切割机构的示意图如图7所示。
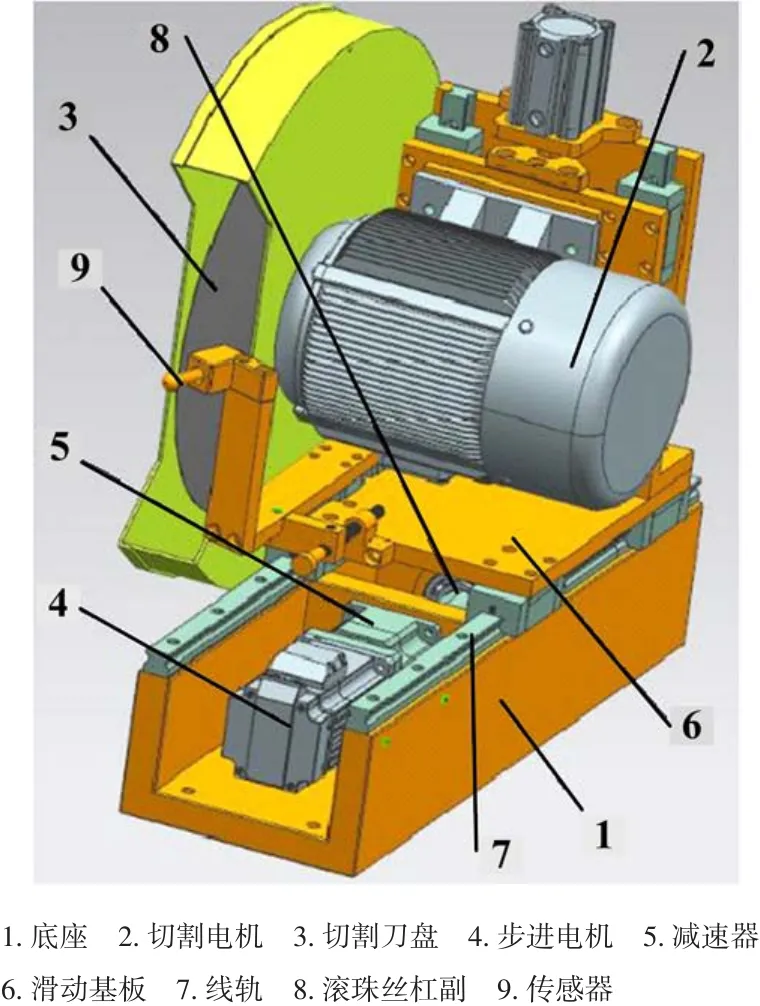
图7 切割机构示意图
3 样机效果试验验证
运用UG软件对机械结构建模设计完成后,进行数字装配及运动仿真,并绘制零件图、装配图。制定设备制造生产流程及各个零件加工工艺,完成零件制造、装配工作。经过对设备的调试,验证了整个机构的举升、抓取、姿态调整、侧压、送料、切割等一系列运动动作,实现了机构运动顺畅、无干涉,符合设计要求。样机如图8所示。
图8 样机
4 结论
本文在条形光学玻璃实际切割加工的过程分析基础上,针对当前切割方式,即人工凭经验对光学玻璃计重并切割存在的误差较大、效率较低且安全性较差等一系列问题,提出了一种新型光学玻璃切割机的机构设计,并对其进行了实验验证及应用。实验结果及工厂实际使用表明,该设备具有高精度、高效率以及高安全性等特性,该光学玻璃切割机设备能够实现条状光学玻璃的自动切割。
[1]王耀祥.光学玻璃的发展及其应用[J].应用光学,2005(05):61-66.
[2]吕沫,张飞特,王建花.TP玻璃切割工艺研究[J].电子工艺技术,2014(04):242-245.
[3]钱海,沈剑云,徐西鹏.不同结合剂金刚石锯片精密锯切石英玻璃研究[J].现代制造工程,2015(8):15-18.
[4]张磊.玻璃切割轨迹最优规划方法及其控制实时性研究[D].武汉:武汉理工大学,2014.
[5]孙建.玻璃切割控制系统设计与控制方法研究[D].武汉:武汉理工大学,2008.
[6]殷苏民,张雷洪.激光热应力切割玻璃实验与分析[J].中国工程科学,2007(9):67-70.
[7]陈科.五维调整平台控制系统设计[D].重庆:重庆大学,2015.
[8]舒兵.光学玻璃板状坯料热加工连轧机结构设计与研究[D].重庆:重庆大学,2012.
