基于QTA的道岔转辙机故障诊断研究与应用*
2018-06-03胡锦添蔡俊涛
胡锦添,蔡俊涛,张 滔
(1.广州市光机电技术研究院,广东广州 510663;2.广州地铁集团有限公司,广东广州 510330)
0 引言
随着城轨交通的迅速发展,微机监测被广泛应用于各种轨道装备[1-3],为设备日常维护决策提供了丰富的数据与判断依据,保障了信号系统的稳定运行。针对电动转辙机的监测,主要是采集电动转辙机动作过程的电流曲线与电压曲线,技术人员凭借经验对电流曲线与功率曲线进行分析,根据电流曲线的各项特征参数来判断转辙机的机械与电气的特性变化[4-6]。但存在着分析时间长、误判与漏判的问题,因此,相对于人工分析,利用计算机基于QTA算法进行故障自动检测与诊断,可实现在线快速进行精确的故障诊断。
定性趋势分析(QTA)的核心思想是把采集的信号转变为一种趋势序列,而这种趋势序列是基于基元的,意思是指一定时间区间内的数据所表现的趋势,例如上升、下降、不变等。趋势可以反映系统的特征、发展速度和趋势,为故障诊断与预测提供一个重要手段。目前,QTA已被广泛应用于过程状态监测[7]、故障检测与诊断[8-9]等。
1 电动转辙机工作原理
不同型号的电动转辙机其动作电流曲线不一样,而对于同一个转辙机,不同的动作电流曲线表征着不同的故障类型。本文以ZD6型直流电动转辙机为例分析不同状态下其所表现的不同动作电流曲线,根据ZD6转辙机的控制信号电路原理[10-12],使用霍尔电流传感器检测道岔的动作回路中的电流,在正常状态下,整个动作过程的电流曲线如图1所示。转辙机牵引道岔的动作过程大概可以分为三部分:解锁—转换—锁闭。把图1的动作过程分为三个区间:第一区间为道岔解锁过程S1;第二区间为道岔转换过程S2;第三区间为道岔锁闭过程S3。道岔转换完毕后,切断动作电路,此时电流为0。
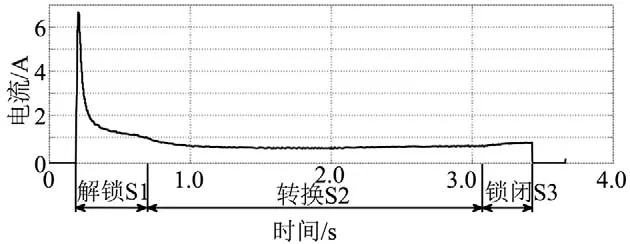
图1 正常状态下动作电流曲线Fig.1 Action current curve under the normal state
当道岔出现故障时,与正常状态下的动作电流曲线进行对比分析,在三个动作区间中分别出现明显的差别。如图2所示,以两种故障为例进行说明:(1)解锁困难故障,在解锁过程S1区间中,动作电流比正常状态下明显增大了一定的数值,这是由于正向锁闭过紧造成反向解锁困难,表现为解锁动作电流增大,只要根据S1区间电流增大即可判断为密贴困难故障;(2)密贴困难故障,在锁闭过程S3区间中,动作电流单调增加,这是由于道岔尖轨与基本轨密贴不好,锁闭阻力逐渐增大,只要根据S3区间电流单调增加即可判断为密贴困难故障。其他故障类型也能直接反映在动作电流曲线中,例如,移动阻力变大故障会表现为动作电流只在S2区间增大。由此可见,不同的故障类型在电流曲线中的变化比较明显,而且分布在不同动作区间,因此,通过分析电流曲线可判断道岔的工作状态与故障类型。

图2 不同工作状态下动作电流曲线对比Fig.2 Comparison of action current curves in different working conditions
2 QTA原理
J.T.Y.Cheung和G.Stephanopoulos(1990年)[13-14]提出了描述过程趋势的问题,提出了“三角形”剧情的思想和以七种剧情来描述的“三角形”组件概念,就是把一个趋势划分为几个剧情来进行分析,奠定了QTA的根基。定性趋势分析(QTA)主要包含两个方面:(1)趋势提取;(2)趋势识别。
2.1 趋势提取
趋势提取的步骤为:(1)数据分割;(2)数据拟合成三种趋势片段(A上升,B下降,C不变)进行描述;(3)所有趋势片段集合{ABBCACCC…}。
以固定时间窗把数据平均分割为连续的区间,时间窗宽度为T,则总时间t=nT(n为分割后的区间个数)。
在每一个区间的数据中使用最小二乘法进行线性拟合[15],在连续区间中的数据拟合为函数:

其中,时间t0为区间的开始点,p是拟合函数的斜率,y0是在时间点t0的纵坐标值。
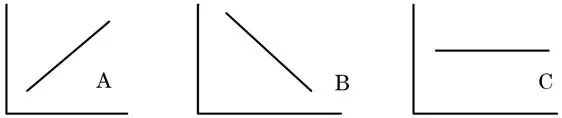
图3 三种趋势片段Fig.3 Three types of trend
2.2 趋势识别
拟合函数的斜率p取值范围归一化为[-1,1],选择合适的阀值β,根据斜率p分别定义三种趋势片段的取值范围:A∈[β,1], B∈[-β,-1],C∈[-β,β],每一个划分区间拟合的线性函数根据斜率p的值定义为相应的趋势片段。
3 基于QTA的故障诊断
识别可能产生的故障状态,是根据先制定规则知识库:使用if…then语句来进行故障特征映射,故障特征由特定故障状态发生时的相应传感器数据来表现,通过人工分析进行提取。
基于规则知识库从趋势到故障类型的推理映射,多个传感器联合判断用and连接。
if传感器S1趋势为Td1 and传感器S2趋势为Td2 and…then故障是F1。
单个传感器数据以趋势序列的顺序以及趋势片段的个数进行匹配。例如,如果规则知识库中包含规则两条:
if传感器S1趋势为{AABBCC}then故障是F1;
if传感器S1趋势为{AABCC}then故障是F2。
若当前传感器趋势序列为{AABCC},则可判断故障为F2。
各种已知的可能的故障类型通过人工模拟并分析识别后,使用if…then形式的规则进行映射,最终形成一个包含多种趋势类型与多种故障类型映射关系的推理知识库。
4 应用分析
如图4所示,实验中在ZD6型转辙机的接线盒中采用电流电压传感器进行信号采集,使用20 kHz采样频率对电流信号进行实时监测,分别采集无故障信号20组,密贴困难故障信号20组,解锁困难故障信号20组。从三种状态下的电流信号中分别随机选取10组数据共30组数据用于建立故障诊断规则知识库,余下的30组数据用于测试趋势匹配与故障诊断验证。

图4 ZD6型转辙机故障模拟Fig.4 Switch default simulation about ZD6
4.1 建立诊断规则库
下面以无故障状态数据为例,说明建立规则知识库的过程,而密贴困难与解锁困难故障诊断的规则建立过程类似。
根据对无故障状态10组电流曲线分析可知,ZD6直流转辙机从开始动作到电流达到最大值的时间基本为30 ms,所以时间窗的宽度定义为30 ms,把电流信号分割为相同宽度的数据区间,如图5所示。
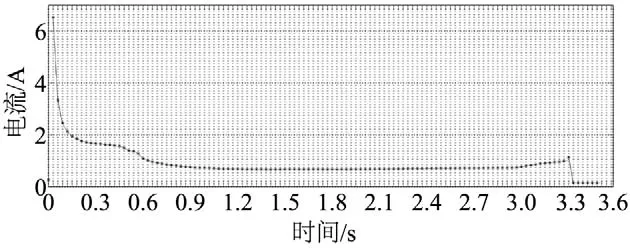
图5 无故障电流曲线分割Fig.5 Segmentation of no fault current curve
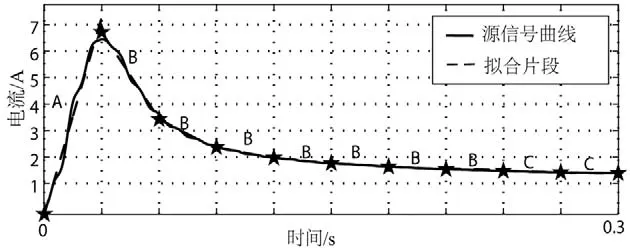
图6 0~0.3 s无故障电流数据拟合曲线Fig.6 Fitting curve of no fault current data between 0 to 0.3 second
在每个数据区间分别进行最小二乘法线性拟合,根据拟合后的一阶函数斜率分别判断为不同的趋势片段,根据经验与实验数据分析,选择斜率判断阀值为β=π/18。此处截取0~0.3 s的前段区间数据进行拟合说明,如图6所示,全部趋势提取的结果集合为{ABBBBBBBBCCCCCCBCBBCCCCCCCCCCCCCCCCCCCCC CCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCCC CCCCCCCCCCCCCCCCCCCCCCCCCCCB},共109个趋势片段,为便于分析,把趋势片段集合简记为{A1B8C6B1C1B2C89B1}。
以此类推,对余下9组无故障电流数据进行趋势提取并简化,得到另外9组趋势序列,把10组趋势序列汇总,如表1所示。
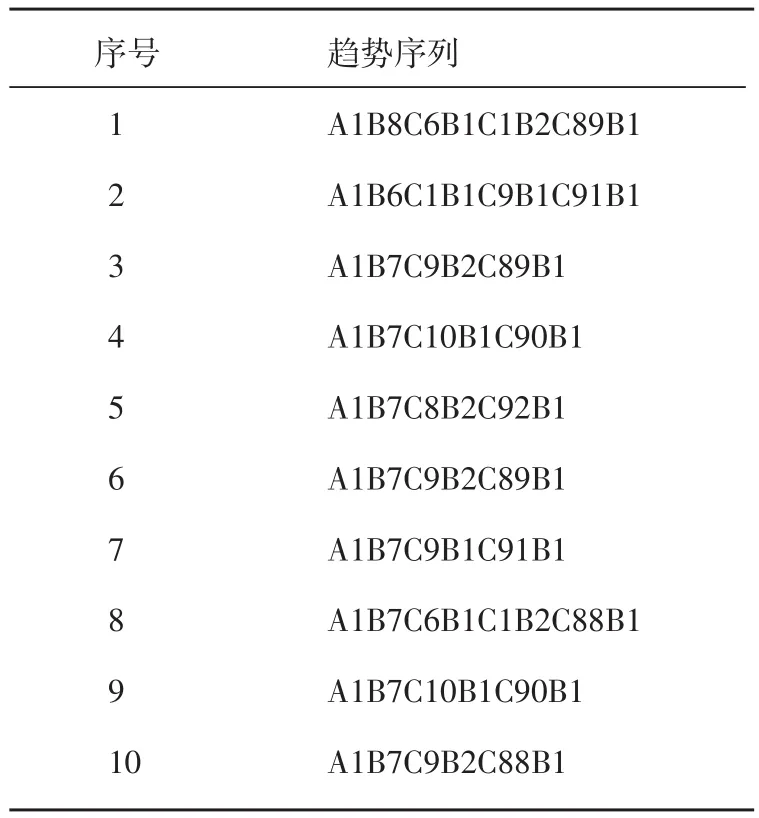
表1 10组无故障电流曲线趋势序列Table 1 10 sets of trend sequencea of no fault current curve
从表1的10组无故障趋势序列中取近似公共部分并取最少个数为:{A1B6C6B1C88B1},则以此为无故障诊断的规则,每个趋势片段的个数数值允许误差为±50%,若不在误差范围内的序列被忽略,以此过滤干扰项。例如第8组数据为{A1B7C6B1C1B2C88B1},前4个趋势片段与后3个趋势片段的个数分别为:{A1B7C6B1}、{B2C88B1},它们均在无故障诊断规则的误差范围内,第五个趋势片段{C1}则不在误差范围内,以此被忽略,省略后的诊断序列简化为{A1B7C6B1B2C88B1},与诊断规则序列的顺序吻合。
密贴困难故障与解锁困难故障的趋势诊断规则建立方式与无故障趋势诊断规则的制定方式类似,具体见图7。


图7 两种故障电流曲线与趋势序列Fig.7 Current curve and trend sequence of two faults
汇总无故障趋势诊断规则与两种故障趋势诊断规则,如表2所示。
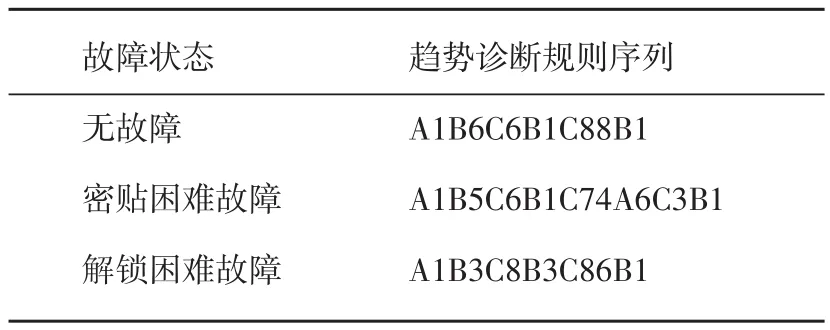
表2 趋势诊断规则Table 2 rules of trend diagnosis
由于无故障与解锁困难故障的动作电流曲线差别在于解锁过程S1区间,解锁困难故障电流幅值比无故障电流幅值大。从图2可看出,解锁困难电流曲线比无故障电流曲线在解锁过程S1区间前段下降趋势小,因此趋势片段{B}出现较少;同理,解锁困难电流曲线比无故障电流曲线在解锁过程S1区间前段下降趋势大,因此趋势片段{B}出现较多。所以,趋势诊断规则匹配需要修改为在趋势片段相同的状态下增加趋势片段匹配度ps,

其中,n为趋势诊断规则中趋势片段的总个数,vmini与vmaxi分别为第i个趋势片段的个数在趋势序列与趋势诊断规则中的最小值与最大值。
4.2 故障诊断验证
在余下的30组电流数据中,每个状态数据随机抽取2组共6组数据作为验证。首先,把6组数据进行趋势提取与趋势识别,提取的趋势序列与诊断结果如表3所示。
分析表3可知,使用该方法可以准确识别出无故障、密贴困难故障、解锁困难故障三种状态,即使解锁困难故障与无故障状态的趋势序列类似,使用匹配度计算后,虽然计算结果比较接近,但是依然可以正确识别为非无故障状态。区分不同故障状态情况下,该方法准确率能达到100%。
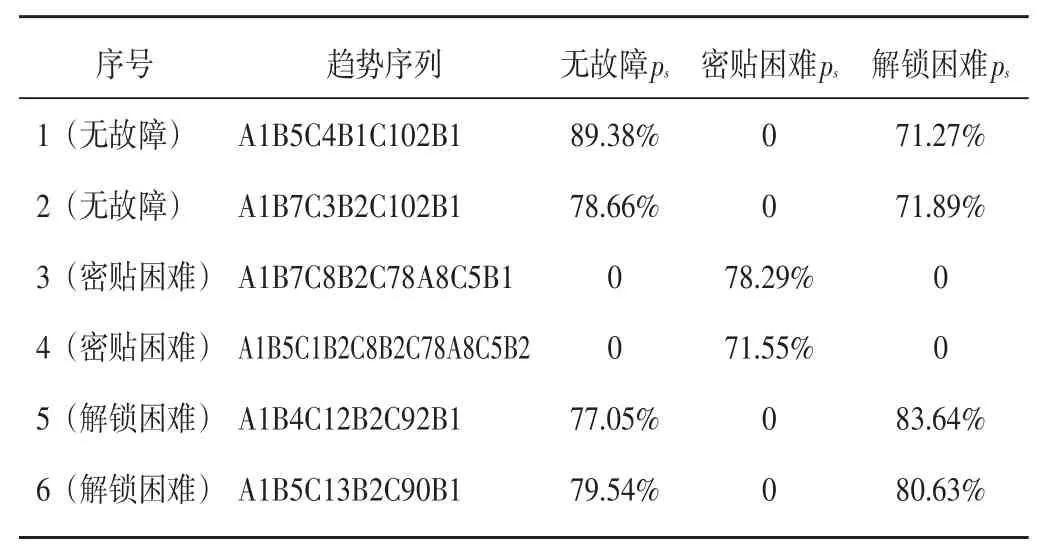
表3 各个状态趋势诊断结果Table 3 Results of trend diagnosis in different conditions
5 结论
过程趋势分析已经成为一种分析时间序列信号的有用手段。使用这种方法的重点在于趋势提取与趋势识别以及诊断规则知识库建立,QTA与大部分的定量分析相比,简化了大量数据的计算过程,使用简洁的表达方式,把采集到的传感器数据转化成趋势特征,为故障诊断提供了一个决策依据。通过QTA进行ZD6直流转辙机故障分析,优于人工经验分析,可自动准确判断是否存在故障并识别相应的故障类型。本文只对两种故障进行分析,采用固定时间窗平均划分数据的方法,可同时适用于不同的故障类型识别,在后续的研究中,加入更优的提取算法与识别算法,建立更全面的所有已知故障诊断规则库,快速地诊断出早期出现的故障。
[1]王丽.微机监测在信号设备维护中的应用[J].铁道通信信号,2007,43(6):18-19.
[2] Ren Y.Analysis of Switch Action Status Cures of Mi⁃cro-computer Monitoring System [J].Railway Signal⁃ling&Communication,2009.
[3]赵会兵.未来铁路信号微机监测的发展方向[J].科技创新与应用,2017(13):295-295.
[4]邱俊杰.ZD6型转辙机动作电流曲线分析[J].铁道通信信号,2008,44(7):20-21.
[5]董昱,赵媛媛,林海香.基于小波分析的电动转辙机动作电流的分析研究[J].兰州交通大学学报,2012,31(6):39-43.
[6]刘仓.直流电动转辙机动作电流的智能分析[J].铁道通信信号,2009,45(8):14-16.
[7]李伟.基于质量数据趋势提取的过程质量控制方法研究[D].镇江:江苏大学,2013.
[8]张海洋,张贝克,吴重光.用于监测复杂系统的计算机辅助定性趋势分析[J].计算机工程与应用,2007,43(17):41-44.
[9]张贝克,张海洋,马昕.定性趋势分析在过程故障诊断中的应用研究[J].系统仿真学报,2008,20(10):2750-2753.
[10]王明泉.六线制双动转辙机道岔控制电路探讨[J].铁道通信信号,2009,45(5):30-31.
[11]沈怀密,金永亮,徐勤弼,等.ZD6型电动道岔工作原理[J].山东交通科技,2015(3):100-101.
[12]刘学民.浅析ZD6电动转辙机单独操纵系统[J].科技信息,2012(23):120-120.
[13]Cheung T Y, Stephanopoulos G.Representation of pro⁃cess trends-Part I.A formal representation framework[J].Computers& Chemical Engineering, 1990,14(4): 495-510.
[14] Konstantinov K B, Yoshida T.Real-time qualitative analysis of the temporal shapes of (bio) process vari⁃ables [J].Aiche Journal, 1992, 38 (11):1703-1715.
[15]李丽丹.基于MATLAB的离散数据最小二乘拟合[J].辽宁工程技术大学学报,2011,30(S1):202-204.
