基于双闭环PID模糊算法的玉米精量排种控制系统设计
2018-06-01陈黎卿解彬彬李兆东陈永新
陈黎卿,解彬彬,李兆东,杨 路,陈永新※
(1. 安徽农业大学工学院,合肥 230036;2. 安徽省智能农机装备工程实验室,合肥 230036)
0 引 言
黄淮海麦玉轮作区麦秸秆采用粉碎还田作业模式,由于小麦秸秆韧性好,秸秆粉碎还田效果差,传统地轮驱动和链条传动形式易出现秸秆缠绕、拥堵等现象,播种时易发生断条,研制一种性能可靠的主动式玉米精量排种控制系统是必要的。
当前玉米播种机多采用地轮驱动播种机和气力式播种机[1],地轮驱动播种机由地轮传递动力,驱动排种轴转动排种,当田间土壤黏重、秸秆覆盖量较大时,造成驱动排种部分无法正常工作[2-5];气力式玉米播种机多用于大型农场,其价格较为昂贵,暂不适用于国内。为减少漏播率和提高玉米精量播种水平,国内外学者对于机械式精密排种器和电控排种器进行一些研究:秦乐涛[6]设计了基于第五轮仪转速采集的玉米精密播种机排种自动控制系统;龚丽农等[7]设计了一种适用于小区播种作业电控排种系统;翟建波等[8]利用传感器技术研制了基于拖拉机前轮转速的自动排种驱动系统;徐志成[9]采用Mamdani模糊算法对自动播种机的电控系统进行控制策略优化设计;张春岭等[10]采用地面测速雷达实现排种电机的反馈控制。以上研究主要采用被动式传感器检测机具作业工况,利用常规速度反馈单闭环PID控制算法为主控制策略,存在参数整定不良、适应性差、控制稳定性差等情况;采用旋转增量式编码器、霍尔测速传感器、超声波测速传感器及第五轮仪测速进行速度测量,由于机具作业时振动强度大、地面不平,导致数据采集不精准影响系统控制准确性,并且在人机交互方面研究较少。
针对上述问题,本文设计一种玉米电控精量排种系统,采用GPS测速传感器采集机具田间作业速度,利用旋转编码器实时采集排种器作业转速,微控制器通过转速环、电流环结合,形成双闭环 PID模糊算法自整定控制参数,并采用USART HMI四线制触控串口屏设计可操控人机界面,以期实现对玉米精量排种的稳定控制,提高排种精度。
1 电控排种系统结构与工作原理
1.1 整机结构组成
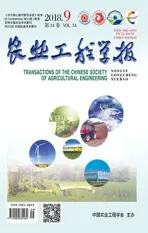
玉米精量电控播种机主要覆土镇压轮、高度调节弹簧、种箱、肥药口宽度调节旋钮、种药箱、播种机上悬挂杆、播种机前悬挂杆、播种机左右悬挂榫头、施肥腿开沟器、排肥管、排种器开沟器、垂直式勺轮排种器、换向减速器、霍尔有感无刷直流电机等组成,结构如图1所示,技术参数如表1所示。
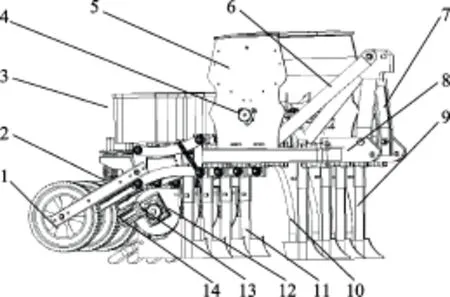
图1 玉米精量电控免耕播种机结构简图Fig.1 Structure of corn precision electric control and no tillage seeder
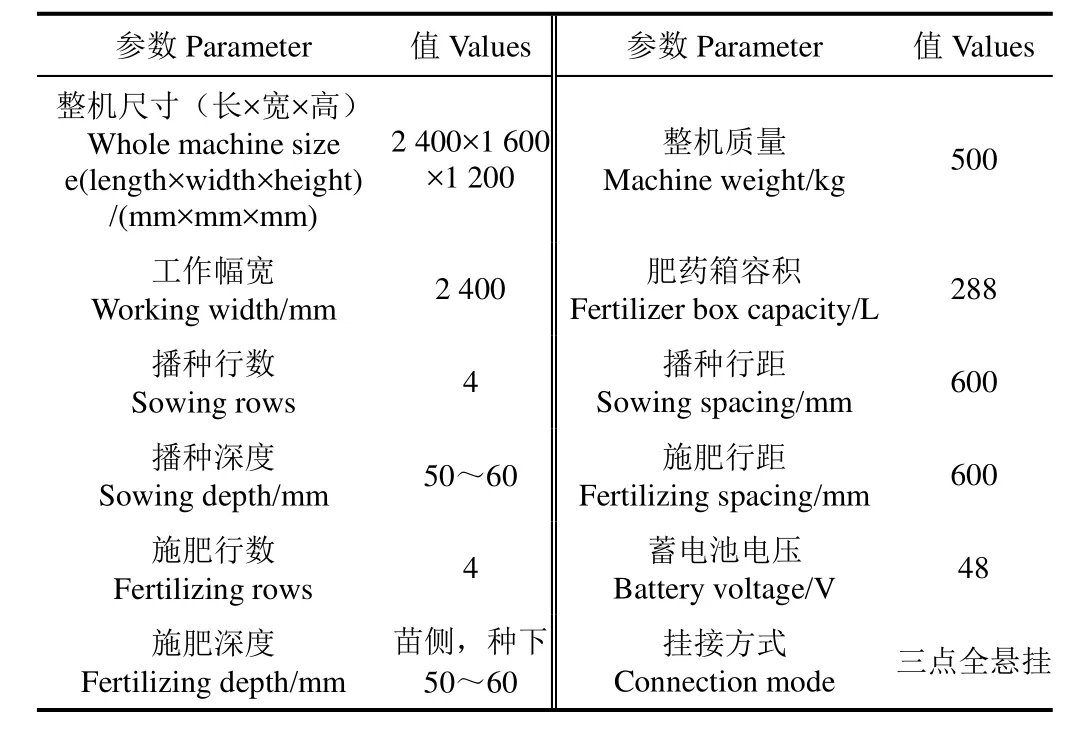
表1 玉米精量电控播种机技术参数Table 1 Technical parameter of corn precision electronic control seeder
1.2 电控排种系统结构组成及工作原理
电控排种系统主要由控制盒、触摸显示界面、旋转编码、GPS测速传感器、无刷直流电机、驱动器、换向减速器等组成[11-12],如图2所示。
机具工作时,电机通过增扭减速器将动力传递给排种轴和肥药轴,电机通过GPS实时测速传感器结合编码器实现双闭环 PID遗传算法自整定控制参数[13-15],实时调节对应转速来驱动排种转轴转动下种。电机通过人机交互界面实时控制电机的启动与应急停止、设定排种粒距,以满足玉米种植的农艺要求。
图2 排种系统组成结构图Fig.2 Composite and structure of seeding system
2 排种控制系统设计
玉米电控精量排种系统设计包括控制器、GPS测速传感器、编码器、无刷直流电机、换向减速器、USTART HMI四线制触控串口屏等[16-19]。以 STM32F103ZET6为核心控制器,主要完成无刷直流电机实时转速控制、USTART HMI四线制触控串口屏、无刷直流电机的驱动和控制,以及控制算法实施等[20-21]。
2.1 控制方案
依据工作原理,玉米精量电控播种机控制系统方案采用如图3所示的技术路线进行设计。

图3 玉米精量电控播种机控制方案流程图Fig.3 Flow chart of corn precision electronic control seeder
如图3所示,GPS测速传感器实时监测机具作业速度,USTART HMI四线制触控屏控制电机待机状态。当机组在田间作业时,通过触控屏按下开始按键启动电机运转,电机转速随着机具作业速度实时变化,当机具作业速度加快,电机转速加快;反之,则电机转速减慢。
系统在运行通过旋转编码器检测排种轴实时作业速度结合双闭环 PID模糊算法实时自整定控制参数,以驱动排种转轴到达最优转速,提高控制精度,实现精量播种。
2.2 硬件设计
控制系统主要由硬件和软件 2部分组成,其中硬件主要由电源转换模块、信号采集模块、控制模块、电机驱动模块、人机交互模块和排种驱动模块。其中电源转换模块是利用48 V转5 V和48 V转12 V的金升阳大功率短路保护模块;信号采集模块采用的KD-100 GPS测速传感器(0.2~120 km/h),通过卫星差分定位测速的原理来检测机具作业速度;控制模块主要采用STM32F103ZET6单片机对采集机具作业速度、编码器实时转速驱动排种模块;排种驱动模块包括无刷直流电机、换向减速器和固定编码器排种转轴[22-26]。其中控制系统电路如图4所示。

图4 玉米精量排种控制系统电路图Fig.4 Circuit diagram of corn precision seeding control system
2.3 控制算法
为保证作业质量和提高抗干扰能力,利用自整定遗传模糊 PID算法对无刷直流电机采用转速、电流双闭环控制,电流环作为内环,转速环作为外环,并采用PWM调制方式实现无刷直流电机调速。
2.3.1 双闭环调速系统模型建立
双闭环调速控制结构框图如图 5所示,转速给定值与反馈值相比较,经增量式 PID调节后,输出电流调节的给定值,与实际检测到的电流值相比较,再经增量式PID调节,输出PWM调制的占空比,此时当系统负载发生变化,其可有效抑制转速波动,提高工作时抗干扰能力,保证了作业质量。

图5 双闭环调速控制结构Fig.5 Speed control structure of double closed loop
2.3.2 控制策略设计
自整定模糊PID控制策略结构如图6所示。给定转速n与反馈转速nf的差值e及差值的变化率ec为模糊控制器输入量,e和ec均为精确量,将二者模糊化后得到模糊量E和Ec,由模糊控制规则进行推理和解模糊后得到修正参数ΔKp、ΔKi、ΔKd,3个修正参数根据电机运行状态实时自动最优调整,从而实现PID控制参数自整定。

利用自整定的 PID 参数ΔKp、ΔKi、ΔKd,确定输入e(t)和输出u(t)之间的关系如式(8):

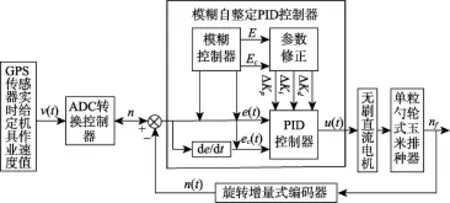
图6 PID控制策略原理图Fig.6 Principle block diagram of PID control strategy
控制系统输入变量 E和 Ec,其模糊子集为{NB,NS,ZO,PS,PB},输出变量ΔKp、ΔKi、ΔKd的模糊子集{NB,NM,NS,Z,PS,ZO,PS,PM,PB}为通过量化因子将E和Ec离散后与模糊论域对应,可得E的量化因子:

设定各变量论域为[–6,6],En 、cEn 为模糊级数,本文取输入量化因子分别取:ΔKE=7.8,ΔKEc=1.2[27-28]。
转速环模糊PID控制器根据不同的E和Ec,确定相适应的ΔKp、ΔKi、ΔKd,通过自整定控制器的参数达到最优转速控制效果,输入变量与输出变量的控制规则如下:
1)当 E较大时,取较大的ΔKp和较小的ΔKd,同时为了防止几分饱和,避免系统响应出现较大超调,应去掉积分作用,即ΔKi=0。
2)当E和Ec为中等大小时,ΔKp、ΔKi、ΔKd都不能太大,应取较小的ΔKp、ΔKi、ΔKd大小的值要适中,以保证系统响应速度。
3)当E较小时,为使系统具有良好的稳态性能,应增大ΔKi和ΔKp的值,同时为避免系统在设定值附近振荡,并考虑系统的抗干扰性能,适当选取ΔKd,通常为中等大小。
3 台架试验
3.1 试验材料与设备
试验材料选用未分级的安农 102,其千粒质量为360 g,质量含水率 11%,勺轮式玉米排种器由安徽省蒙城育田机械有限公司提供。该试验在安徽农业大学JPS-12计算机视觉排种器试验台进行试验[29],如图 7所示。
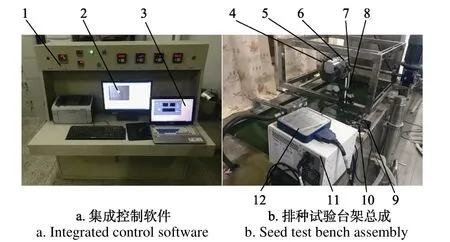
图7 台架试验装置Fig.7 Composition diagram of experimental device
3.2 试验设计与方法
3.2.1 试验设计
以GB-T 6973-2005 《单粒(精密)播种机试验方法》为依据,具体进行工作转速精度验证、排种精度控制和排种性能试验,以排种转速变异系数、株距合格指数、漏播指数和重播指数评价指标,验证本文研制的玉米精量排种控制系统的可行性以及其对排种性能的影响规律。
试验时,需设定排种株距。黄淮海麦玉轮作区被动式地轮驱动排种株距范围为 130~330 mm,故设定排种株距为130、160、190、220、250、280、300和330 mm共8个水平,机组前进速度为3~8 km/h(3、4、5、6、7、8 km/h)取6个水平。
3.2.2 试验方法
1) 工作转速精度验证
该试验,通过LABVIWE-NI数据采集系统采集排种轴输出实际转速nZ,采集时间为1 min,重复6次(nZ1~nZ6为6次重复采集试验的平均转速),计算出排种转速变异系数。
2)排种精度控制验证
采用JPS-12计算机视觉排种器试验台单次连续采集不同工况下250粒种子株距值,重复3次试验,算出不同工况下的平均株距值以及变异系数,δZ为3次试验的株距变异系数。
3)播种速度对株距影响
为探讨不同播种株距条件下的最优播种速度,在不同设定播种株距条件下,重复 3次,在模拟机具作业速度为3、4、5、6、7、8 km/h下,单次试验连续测定250粒排种株距。
4)株距合格指数、漏播指数、重播指数测定
为研究机具作业速度与设定播种株距对排种器性能的影响,采用JPS-12计算机视觉排种器试验台单次连续采集不同工况下250粒种子,重复3次试验,获得株距合格指数S(%)、漏播指数M(%)、重播指数R(%),设定播种株距下排种株距合格指数、漏播指数、重播指数,Sm、Mm、Rm为重复3次试验平均株距合格指数,平均漏播指数;平均重播指数。株距合格指数、漏播指数、重播指数,计算公式如下:

式中S为合格指数,%;M为漏播指数,%;R为重播指数,%;N为播种总株数,株;NS为播种合格株数;NM为播种漏播株数;NR为播种漏播株数。
3.3 试验结果与分析
3.3.1 转速控制精度试验结果与分析
表2为转速控制精度验证试验结果,由表2可知,理论排种转速为6~54 r/min时,实际转速的变异系数均在 10%以下,最大变异系数为 9.22%,最小变异系数为3.23%,实际转速在理论转速附近波动范围小,稳定性较好,最大平均偏差为4.16%,最小平均偏差为0.27%,控制精度较好。
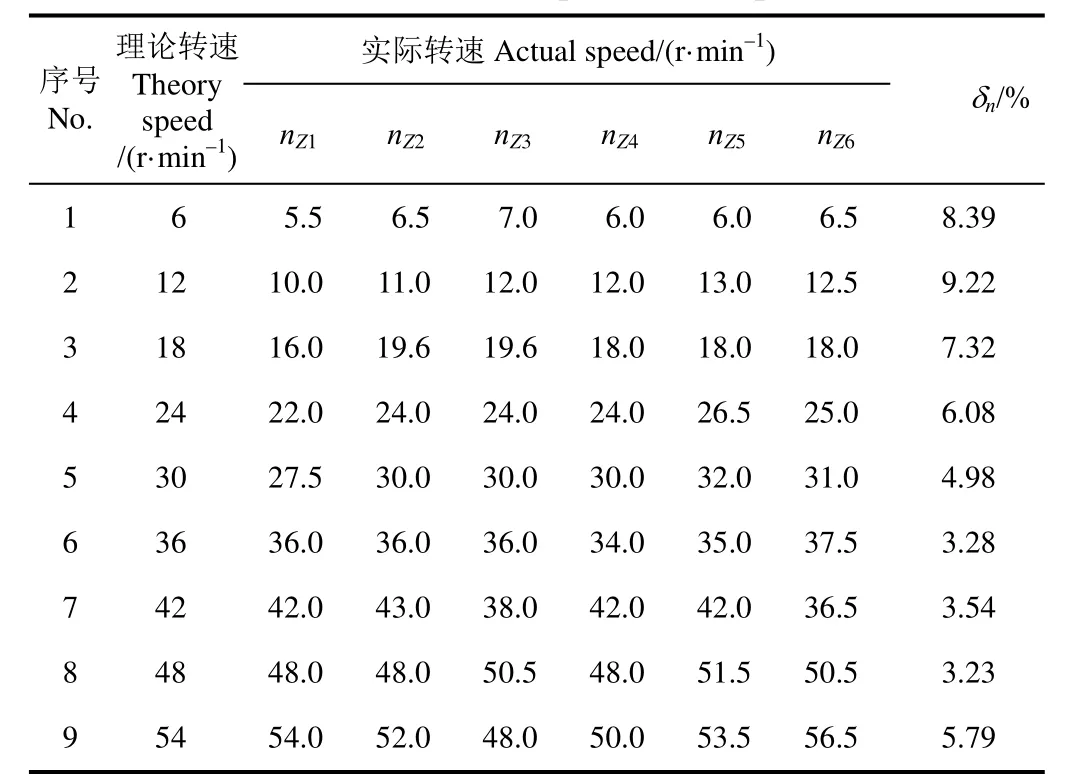
表2 转速控制精度验证试验结果Table 2 Test result of speed control precision
3.3.2 排种株距与设定株距对比分析
实际排种株距值允许波动范围为 0.5Zs<ΔZs<1.5Zs[30],表 3为设定播种株距与实际播种比较试验结果,由表 3可知,实际播种株距均未超出允许波动范围,变异系数在8%以下。在同一设定播种株距中,各实际播种株距与设定播种的最大变异系数为 7.32%,最小变异系数为0.75%,株距精度控制稳定。
3.3.3 播种速度对株距影响试验结果与分析
表4为设定排种株距下的排种株距试验结果,由表4可知,在模拟机组前进速度为3~8 km/h下,不同工况下变异系数均在 15%以下,实际排种株距均在允许范围之内[30]。随着机组作业速度增大,株距平均变异系数分别为10.88%、11.63%、11.88%、12.88%、14.00%和14.13%,可见排种稳定性变差;随着设定排种株距增大,株距平均变异系数分别为12.83%、14.17%、13.83%、11.17%、12.33%、12.83%和10.33%,排种稳定性有所提高,其中330 mm株距的排种稳定性较优。因此,满足玉米种植农业要求下,相同排种速度条件,应选取较大设定排种株距。
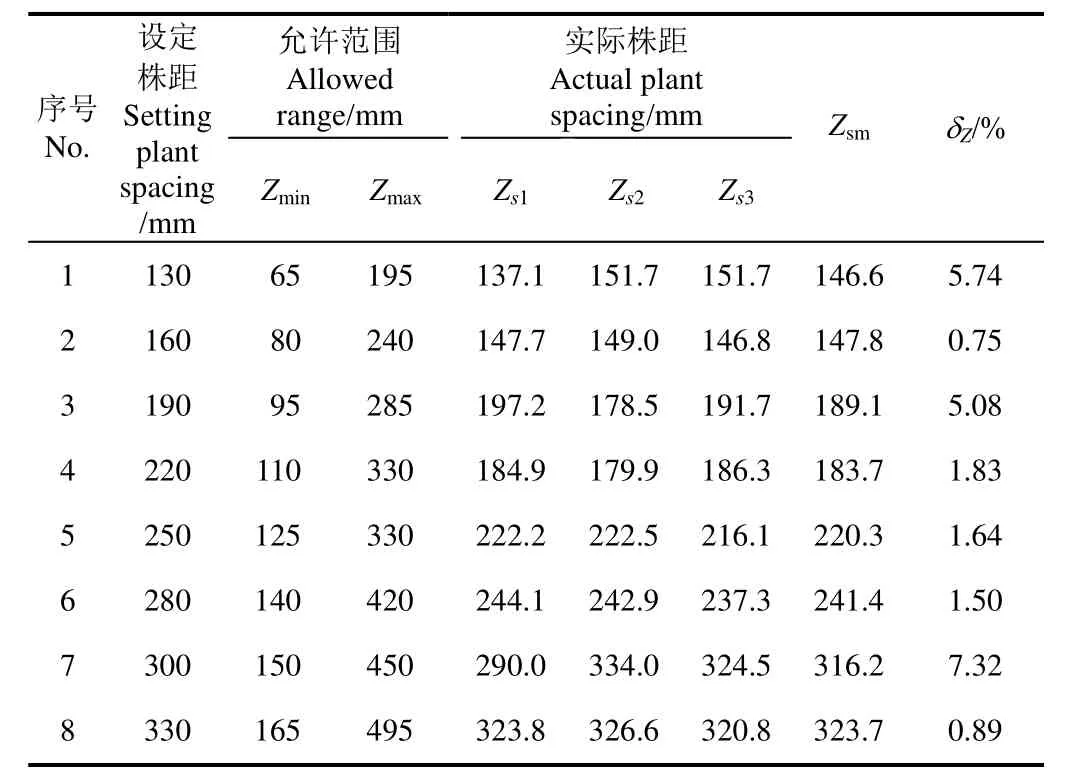
表3 设定播种株距与实际株距比较试验结果Table 3 Comparision of setting plant spacing with actual plant spacing
3.3.4 排种性能结果与分析
由表5可知,在相同机具作业速度下,随着设定排种株距加大,粒距合格指数均有所提高;在设定排种株距相同时,随着车速的增加,粒距合格指数有所降低。在中低车速 3~5 km/h作业时,粒距合格指数不低于93%,中高车速6~8 km/h作业时,粒距合格指数90%左右。
当设定排种株距不变时,播种速度越高,漏播指数越来越高,而重播指数降低;在相同机组作业速度下,随着设定排种株距加大,漏播指数均有所降低,重播指数有所升高。最大漏播指数为9.32%,不同工况下,平均漏播指数均在10%以下;最大重播指数为9.67%,不同工况下,平均重播指数均在10%以下。依据JB/T51017-1999《中耕作物精密播种机产品质量分等》,在设定株距为130~330 mm 时,播种株距变异系数≤25%[31],均满足优等品标准。因此,可满足实际播种作业要求。
综上所述,由于漏播指数与重播指数之间存在一定联系,若漏播指数高,则重播指数低,反之同理。因此,可在适当放宽重播指数的条件下,保证较低的漏播指数。在保证作业效率前提下,结合田间作业实际需求,在设定排种株距 130~300 mm 下,机具作业速度应在 4~6 km/h范围内;在设定排种株距250~330 mm下,机具作业速度应在5~8 km/h范围内。
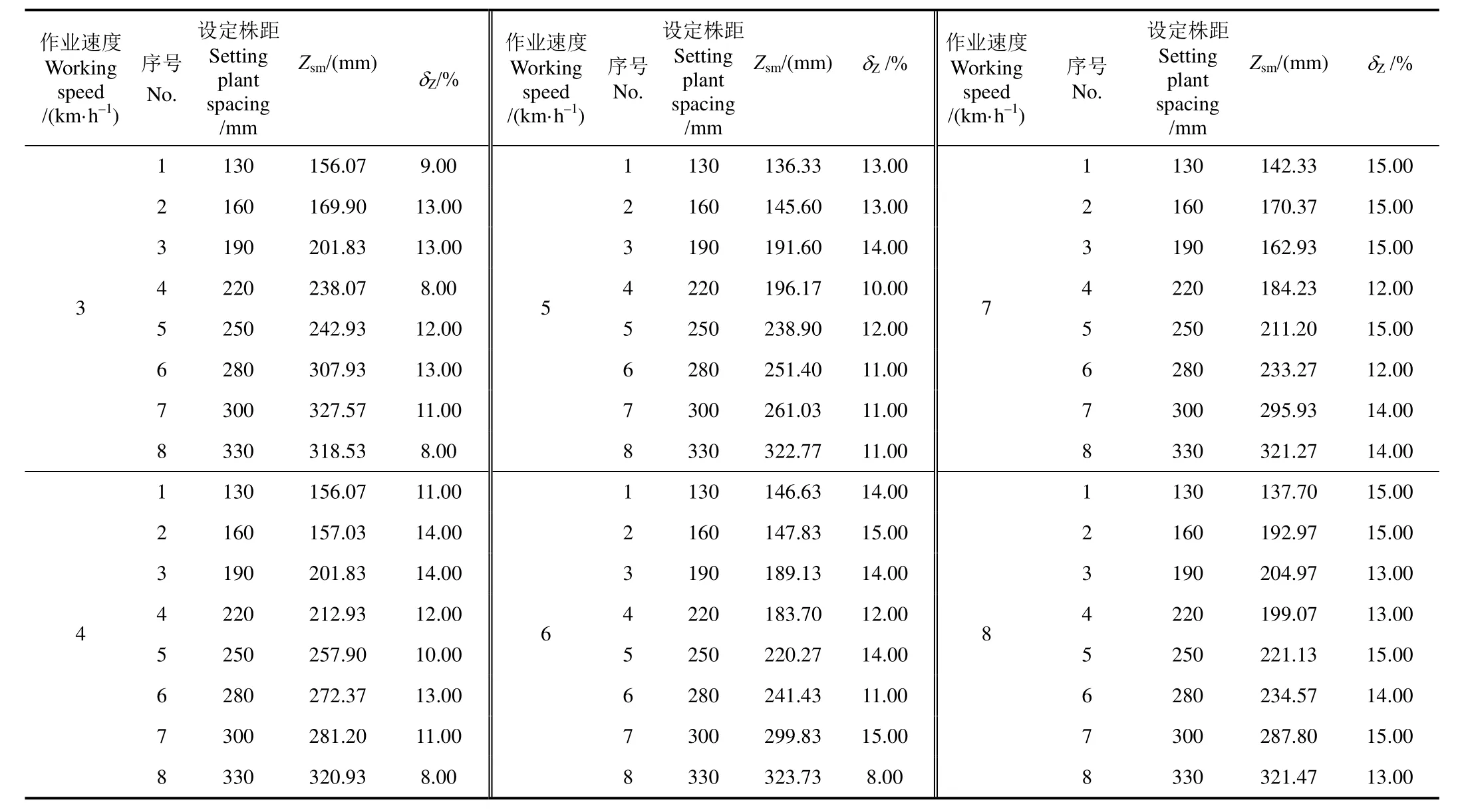
表4 设定排种株距下的排种株距试验Table 4 Plant spacing test of setting plant spacing
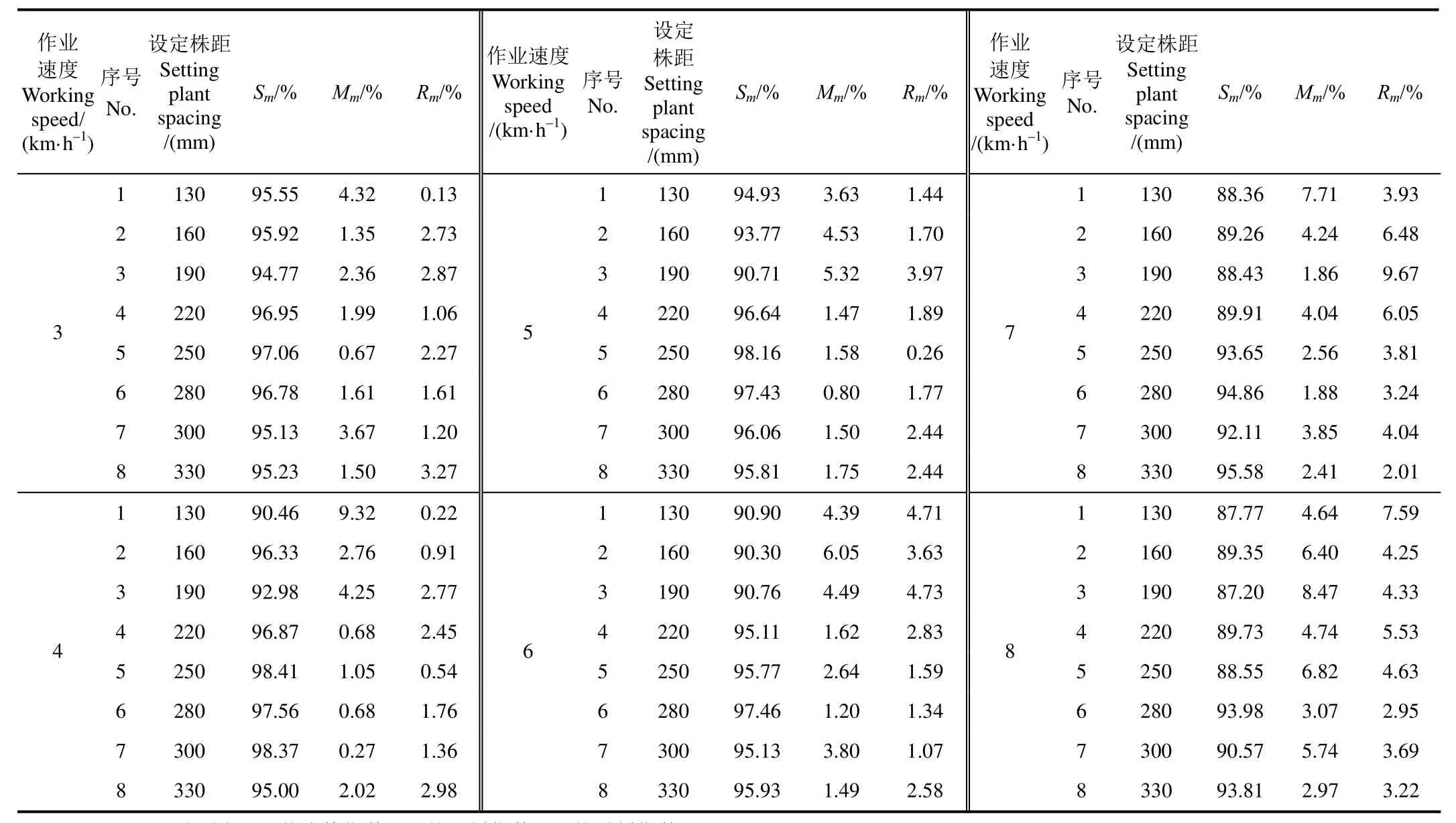
表5 设定排种株距下的排种株距合格指数Table 5 Qualification index of plant spacing for setting plant spacing
4 田间试验
为验证该玉米精量排种控制系统的工作稳定性,以安徽农业大学研制的 4行玉米免耕播种机为平台,试验材料选用未分级的安农102玉米品种,其千粒质量为360 g,质量含水率 11%。性能对比机型是市场上常见的勺轮式玉米排种器。田间播种试验于2018年03月10日在安徽省合肥市安徽农业大学高新农业技术产业园开展,土壤类型为黏性土,如图 8所示。田间实际作业时,牵引动力为上海纽荷兰 SNH904拖拉机,机组前进速度为5.6 km/h,投种高度为15.6 cm,播种4行,行距为600 mm。在设定播种株距130、160、190、220、250、280、300、330 mm株距下进行田间试验,每次试验采集稳定作业后的80个数据,重复3次,获得实际播种株距平均值及株距合格指数等田间试验结果,如表 6所示。在各种株距下,研发的电控精量排种系统株距合格指数平均值为90.89%,漏播指数平均值为2.54%;在该种情况下,由于土壤黏重,导致地轮驱动无法排种,与参考文献[10,32]关于勺轮式玉米排种器试验数据相比合格指数提高2.12%,漏播指数降低4.32%。结合台架与田间验证结果表明,该玉米精量排种控制系统在田间作业工况差时,满足玉米种植农艺要求,符合 JB/T51017-1999《中耕作物精密播种机产品质量分等》。

图8 田间试验Fig.8 Field experiment

表6 田间试验结果Table 6 Result of field test
5 结 论
1)设计了一种基于双闭环PID模糊控制算法的玉米精量排种控制系统,工作转速精度验证试验表明,在设定排种转速范围为6~54 r/min时,实际工作转速的变异系数均小于 10%,通过转速精度验证试验,检验了实际排种转速在工作时间内的波动幅度,得出排种转速在理论转速附近波动范围小,满足控制方案需要。
2)台架试验表明,设定排种株距相同时,机具作业速度增大,株距合格指数越差,中低车速3~5 km/h作业时,粒距合格指数不小于93%,中高车速6~8 km/h作业时,粒距合格指数 90%左右;田间验证试验表明,该玉米精量排种控制系统田间播种株距合格指数不低于87%,平均值为90.89%,漏播指数均小于4%,平均值为2.54%,与市场上常见的勺轮式玉米排种器相比合格指数提高2.12%,漏播指数降低4.32%。
本研究可实现玉米主动精量排种,并在机组前进速度不大于8 km/h范围内对排种株距实现定量控制。影响玉米主动精量排种控制的因素较多,如排种器结构型式、机组振动强度、投种高度和玉米品种等,针对上述因素及各因素间交互作用对主动排种控制性能的影响仍需进一步开展研究。
[参 考 文 献]
[1] 杨丽,史嵩,崔涛,等. 气吸与机械辅助附种结合式玉米精量排种器[J]. 农业机械学报,2012,43(增刊):48-53.Yang Li, Shi Song, Cui Tao, et al. Air-suction corn precision metering device with mechanical supporting plate to assist carrying seed[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp): 48-53. (in Chinese with English abstract)
[2] 王庆杰,李洪文,何进,等. 凹形圆盘式玉米垄作免耕播种机的设计与试验[J]. 农业工程学报,2011, 27(7):117-122.Wang Qingjie, Li Hongwen, He Jin, et al. Design and experiment on concave disc type maize ridge-till and no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011,27(7): 117-122. (in Chinese with English abstract)
[3] 戴飞,赵武云,唐学鹏,等. 旱地玉米全膜覆盖双垄沟精量播种机工作参数优化[J]. 农业机械学报, 2013,44(增刊1):39-45.Dai Fei, Zhao Wuyun, Tang Xuepeng, et al. Parameters optimization of precision seeder with corn whole plastic-film mulching on double ridges in dryland[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 39-45. (in Chinese with English abstract)
[4] 张喜瑞,何进,李洪文,等. 水平拨草轮式玉米免耕播种机设计和试验[J]. 农业机械学报, 2010,41(12):39-43.Zhang Xirui,He Jin,Li Hongwen,et al. Design and experiment on no-till planter in horizontal residue-throwing finger-wheel type for mazie[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12): 39-43.(in Chinese with English abstract)
[5] 李复辉,杜瑞成,刁培松,等. 舵轮式玉米免耕精量施肥播种机设计与试验[J]. 农业机械学报, 2013,44(增刊1):33-38.Li Fuhui, Du Ruicheng, Diao Peisong, et al. Design and experiment of helm-shaped no-tillage precision fertilization planter for corn[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp. 1): 33-38. (in Chinese with English abstract)
[6] 秦乐涛. 玉米精密播种机排种自动控制系统研究[D]. 北京:中国农业大学,2002.Qin Letao. Study on Automatic Control Seeding System for Maize Precise Planter[D]. Beijing: China Agricultural University, 2002. (in Chinese with English abstract)
[7] 龚丽农,员玉良,尚书旗,等. 小区播种机电控系统设计与试验[J]. 农业工程学报,2011, 27(5):122-126.Gong Linong, Yun Yuliang, Shang Shuqi, et al. Design and experiment on electronic control system for plot seeder[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(5): 122-126. (in Chinese with English abstract)
[8] 翟建波,高海洲,郑晓龙,等. 基于传感器技术的自动排种驱动系统研究[J]. 湖北农业科学,2011, 50(17):3619-3621,3646.Zhai Jianbo,Gao Haizhou, Zheng Xiaolong, et al. Research on automatic seed metering drive system based on sensor technology[J]. Hubei Agricultural Sciences,2011, 50(17):3619-3621, 3646. (in Chinese with English abstract)
[9] 徐志成. 自动播种机电控系统的模糊控制[J]. 农业机械化,2014, 4:12-15, 20.Xu Zhicheng. Fuzzy Control of electronic control system for automatic drill[J]. Journal of Agricultural Mechanization Research,2014, 4: 12-15, 20. (in Chinese with English abstract)
[10] 张春岭,吴 荣,陈黎卿. 电控玉米排种系统设计与试验[J].农业机械学报,2017,48(2):51-59.Zhang Chunling,Wu Rong,Chen Liqing. Design test of electronic control seeding system for maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(2): 51-59. (in Chinese with English abstract)
[11] 张辉,李树君,张小超,等. 变量施肥电液比例控制系统的设计与实现[J]. 农业工程学报, 2010,26(增刊2):218-222.Zhang Hui, Li Shujun, Zhang Xiaochao, et al. Development and performance of electro-hydraulic proportion control system of variable rate fertilizer[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(Supp. 2): 218-222. (in Chinese with English abstract)
[12] 梁春英,衣淑娟,王熙. 变量施肥控制系统PID控制策略[J]. 农业机械学报,2010, 41(7):157-162.Liang Chunying, Yi Shujuan, Wang Xi. PID control strategy of the variable rate fertilization control system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010,41(7): 157-162. (in Chinese with English abstract)
[13] 陈满,鲁伟,汪小旵,等. 基于模糊PID的冬小麦变量追肥优化控制系统设计与试验[J]. 农业机械学报,2016,47(2):71-76.Chen Man, Lu Wei, Wang Xiaochan, et al. Design and experiment of optimization control system for variable fertilization in winter wheat field based on fuzzy PID[J].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2): 71-76. (in Chinese with English abstract)
[14] 苗中华,李闯,韩科立,等. 基于模糊PID的采棉机作业速度最优控制算法与试验[J]. 农业机械学报,2015,46(4):9-14.Miao Zhonghua, Li Chuang, Han Keli, et al. Optimal control algorithm and experiment of working speed of cotton-picking machine based on fuzzy PID[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 9-14. (in Chinese with English abstract)
[15] 梁春英,吕鹏,纪建伟,等. 基于遗传算法的电液变量施肥控制系统PID参数优化[J]. 农业机械学报,2013,44(增刊 1):89-93.Liang Chunying, Lv Peng, Ji Jianwei, et al. Optimization of PID parameters for electro-hydraulic variable rate fertilization system based on genetic Algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 89-93. (in Chinese with English abstract)
[16] 陈黎卿,陈玉,郑媛媛,等. 微型电动施肥机的设计与试验[J]. 机械设计,2013,30(8):79-82.Chen Liqing,Chen Yu,Zheng Yuanyuan,et al. Design and experiment on fertilizer applicator[J]. Journal of Machine Design,2013, 30(8): 79-82. (in Chinese with English abstract)
[17] Back S W, Yu S H, KimY J, et al. An image-based application rate measurement system for a granular fertilizer application[J]. Transactions of the ASABE, 2014, 57(2):679-687.
[18] Dong, Fuhong, Petzold, Olaf, Heinemann, Wolfgang, et al.Time-optimal guidance control for an agriculture robot with orientation constraints[J]. Computers and Electronics in Agriculture, 2013, 99: 124-131.
[19] Huan J, Liu X Q, Chong Q F, et al. Design of an aquaculture monitoring system based on android and gprs[J]. Applied Engineering in Agriculture, 2014, 30(4): 681-687.
[20] 郭娜,胡静涛. 插秧机行驶速度变论域自适应模糊PID控制[J]. 农业机械学报,2013,44(12):245-251.Guo Na, Hu Jingtao. Variable universe adaptive fuzzy-PID control of traveling speed for rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(12): 245-251. (in Chinese with English abstract)
[21] 古玉雪,苑 进,刘成良. 基于模糊系统的开度转速双变量施肥控制序列生成方法[J]. 农业工程学报,2011,27(11):134-139.Gu Yuxue, Yuan Jin, Liu Chengliang. FIS-based method to generate bivariate control parameters regulation sequence for fertilization[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2011,27(11): 134-139. (in Chinese with English abstract)
[22] 陈满,施印炎,汪小旵,等. 冬小麦精准追肥机专家决策系统[J]. 农业机械学报,2015,46(7):64-70.Chen Man,Shi Yinyan,Wang Xiaochan, et al. Expert decision system of variable nitrogen application in winter wheat[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 64-70. (in Chinese with English abstract)
[23] 朱瑞祥,葛世强,翟长远,等. 大籽粒作物漏播自补种装置设计与试验[J]. 农业工程学报,2014,30(21):1-8.Zhu Ruixiang, Ge Shiqiang, Zhai Changyuan,et al. Design and experiment of automatic reseeding device for missseeding of crops with large grain[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2014, 30(21): 1-8. (in Chinese with English abstract)
[24] Yu Xiaoyu, Chen Liqing, Wu Mengran,et al. Research on the simulation and experiment of d-bale knotter based on multi- body dynamics[J]. International Agricultural Engineering Journal, 2016, 25(1): 85-93.
[25] 孙传祝,王法明,李学强,等. 马铃薯精密播种机智能控制系统设计[J]. 农业工程学报,2017,33(18):36-44.Sun Chuanzhu,Wang Faming,Li Xueqiang, et al. Design of intelligent control system of potato precision planter[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(18): 36-44.(in Chinese with English abstract)
[26] 李军伟,崔师,李连强,等. 基于模糊PID 的无刷直流电机控制系统设计开发[J]. 机械设计与制造,2013(2):77-79.Li Junwei, Cui Shi, Li Lianqiang, et al. Design and development of brushless DC Motor control system based on fuzzy PID control[J]. Machinery Design&Manufacture,2013(2): 77-79. (in Chinese with English abstract)
[27] 中国农业机械化科学研究院. 农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007.
[28] 乐巍. 车辆半主动悬架模糊控制方法研究[D]. 镇江:江苏大学,2002.Yue Wei. Research on Fuzzy Control Methods for Semi-suspension of Vehicle[D].Zhenjiang:Jiangsu University,2002. (in Chinese with English abstract)
[29] 赵淑红,周勇,刘宏俊,等. 玉米勺式排种器变速补种系统设计与试验[J]. 农业机械学报,2016,47(12):38-44.Zhao Shuhong, Zhou Yong, Liu hewen, et al. Design of reseed shift speed system of scoop-type metering device of corn[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(12): 38-44. (in Chinese with English abstract)
[30] GB/T 6973-2005,单粒(精密)播种机试验方法[S].
[31] JB/T51017-1999,中耕作物精密播种机产品质量分等[S].
[32] 张春岭,陈黎卿,吴荣. 基于离散元法的勺轮式排种器性能仿真分析[J]. 安徽农业大学学报,2016,43(5):848-852.Zhang Chunling, Chen Liqing, Wu Rong. Simulation analysis for seeding performance of spoon-wheel seed metering device based on discrete element method[J]. Journal of Anhui Agricultural University, 2016, 43(5): 848-852. (in Chinese with English abstract)