一种基于北斗的航空搜救机载指挥系统设计
2018-05-30方芳杨航李伟李洪烈葛耀武
方芳 杨航 李伟 李洪烈 葛耀武


摘要:针对飞行人员海上航空搜救应用特点,本文提出一种基于北斗的机载指挥系统设计方案,分析了北斗卫星导航系统在搜救系统机载平台应用的作用与功能需求;设计了系统功能优先级,将服务权限划分为六级,合理解决了北斗RDSS服务频度限制与应用需求的矛盾;设计了三级搜救装备体制,明确了搜救指挥层级中的角色定位;设计了指挥操作流程方案,在此基础上完成了功能单元划分,建立软件功能框架,為北斗卫星导航系统在航空搜救领域的应用提供技术依据。
关键词:北斗卫星导航系统;航空搜救;指挥系统;机载装备;功能框架
中图分类号:TP311.52 文献标识码:A
我国已建设了以超短波手段为主的搜救通信装备体系,采用超短波通信链路,通过搜救直升机或固定翼搜索引导飞机在海上大范围搜索探寻超短波救生电台信号和示位信标信号开展救援行动[1]。正在提升以北斗导航为手段的监控、定位、搜救处理功能,但是受限于海上搜救通信困难、定位困难、生存困难等因素,航空搜救仍处于搜救力量、技术手段、体制机制建设的初级阶段[2,3]。
本文从系统的角度分析研究北斗在航空救生机载平台中的功能需求[4,5],对其在航空救生系统中角色进行定位,以北斗二代协议[6-8]为基础,通过北斗一代定位、短报文[10]、指挥等功能[9,10]实现北斗机载端机与原机搜救系统的信息交互;通过功能优先级限定及操作流程规划,使其进一步融人整个机载救生系统;通过短报文功能完成搜救信息转发、位置报告、协同搜救等功能,提高海上搜救效率与成功率。
1 功能需求
调研后功能需求见表1。
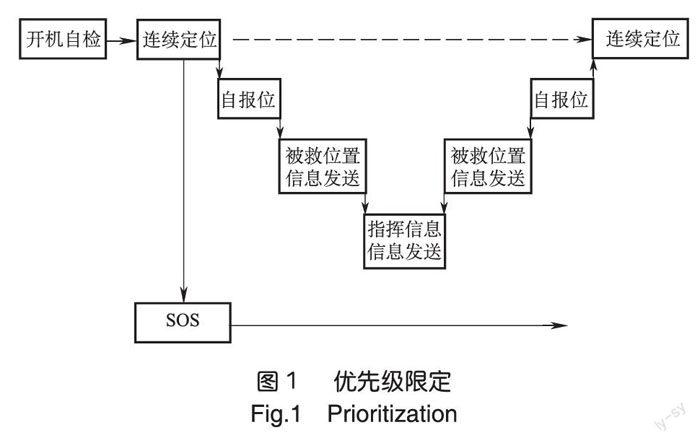
2 优先级设定
北斗RDSS服务具有频度限制,每使用一次后都需要一定的时间间隔,而按上述功能的描述,在工作过程中有些任务是需要连续进行的,会一直占用服务频度,从而导致其他的任务不能执行,如自报位或连续定位工作时,会一直占用,其他信息无法及时发送。因此,需要对这些功能进行优先级划分,更好地完成系统赋予的任务使命,优先级划分如下:
(1)特权:SOS
该功能为飞机遇险向指挥监测站发出的求救信息,为飞机最后的遇险位置,关系到飞行员的生命保障。
(2)优先1级:无线电静默
该功能为执行特定任务或在某些区域时必须保持的状态,一旦发信息很有可能造成飞机遇险。
(3)优先2级:指挥短报文发送
该功能为飞行员通过手持控制器编辑发送的指挥控制信息,需要及时与指挥监测站或被救对象沟通。
(4)重要:被救对象位置信息发送
该功能把被救对象位置信息发送给指挥监测站,引导其他兵力开展救援,因为采用的是1s级服务频度,即便延迟1~2s,不会对救援行动产生影响。
(5)一般:自报位信息发送
该功能连续把惯导的本机精确位置信息发送给指挥监测站,即便中断一段时间(30s以内,按10个被救对象的位置信息都要发送),也不会对地面观察造成影响。
(6)普通:连续定位
该功能为辅助功能,定位的位置信息仅作飞行员参考用。
开机自检完成后自动进入连续定位模式,自报位可以中断连续定位,被救对象信息发送可以中断自报位,指挥短报文发送可以中断被救对象信息发送,SOS可以中断所有当前工作。
3 角色定位
采用北斗二号系统的RDSS体制,具有指挥、短报文通信与有源定位功能。其与指挥监测站、飞行员救生电台构成三级搜救体制。
按搜救指挥体系的层级,第一级是集成有RDSS体制的北斗二号指挥型用户机的指挥监测站,第二级是所在的搜索引导平台,第三级是集成有RDSS体制的北斗二号基本型用户机的手持救生台,如图2所示。按北斗指挥关系的特点,存在以下几种情况:
(1)手持台自定位时,指挥监测站和搜索引导平台均可以收到其定位信息。
(2)手持台给搜索引导平台发送短报文时,指挥监测站能监收到短报文。
(3)自定位时,指挥监测站能监收到其定位信息,从而知道搜索引导平台位置。
(4)搜索引导平台能通过手持台与指挥监测站进行信息交互。
下级用户可以对应多个上级,图中以虚线表示,上级用户可以监收多个下级的信息,或同时指挥多个下级协同完成任务。对于搜救体系来说,指挥监测站可以指挥多个搜索平台协同实现多区域的多目标搜索,使搜救体系能够应对大规模的救援任务,具体应用如下:
(1)监收
在采用北斗的搜救体系中,担负监收下属子用户,即待救目标的定位信息。
(2)被救对象位置信息发送
担负把救生电台得到的被救对象位置信息以短报文的形式发送给指挥监测站。
(3)联络和自救报位
在远海或超低空飞行中,担负自救报位和指挥联络任务,在遇险时上报求救信号和本机坐标。
搜索引导任务系统完成任务时,主要搜救流程如下:
(1)手持台中的北斗能正常工作,当其自动进行定位时,搜索平台或指挥监测站任何一个处于开机正常工作状态,都能及时收到该位置信息,能立即组织救援。
(2)手持台中没有北斗或其北斗不能正常工作,搜救任务系统启用救生电台与定向机定位落水飞行员位置,以短报文通信方式发送给指挥监测站,便于及时开展救援行动。
4 操作流程设计
开机后首先进入开机自检过程,完成后进入连续定位工作状态。用户可根据需要用手持控制器设置为其他工作状态。
主机内部工作流程按照优先级进行工作,处理流程图如图3所示。整个工作流程分为ARINC429数据和RS422数据两个中断,一个主线程。
ARINC429数据中断主要处理两个信息,一是主动的从搜索定位处理系统性获取惯导的定位信息,在用户通过手持控制器选择自报位功能时启动;二是搜索定位处理系统有被救对象位置信息时向主机报送该位置信息,是被动过程。收到后先保存,设置对应发送标志,然后退出中断。
RS422数据中断主要处理手持控制器来的控制指令与编辑的短消息,收到后先保存,设置对应状态或发送标志,然后退出中断。
主线程先判断服务频度是否到來,在没到来时执行手持控制器的其他操作。服务频度到来后按优先级从高到低查看有无,先执行优先级高的任务。
SOS任务因涉及到飞机遇险与飞行员救援,进入后不再退出。静默开启后所有发送功能禁止,包括北斗校时,一直到静默关闭再恢复正常工作。指控信息和被救对象位置信息都有发送需求时,优先发送指控信息,被救对象位置信息压栈保存,待下次服务频度到来时再取出发送。
自报位和RDSS自定位功能按优先级什么时候空闲,什么时候执行,因为其不会对完成搜索引导任务产生影响。
5 结论
根据以上设计准则,设计了一套机载北斗短报文收发设备,设备由天馈、主机和手柄组成,通过ARINC429接口与原机搜索定位处理系统交联,该产品的主要作用为传输本机地理位置信息(惯导信息)和收到的手持救生电台地理位置信息,由北斗卫星通信链路实现短报文远程通信,传输信息到地面站,最终实现对手持北斗设备的搜寻,该设备已实现小批量装备,在航空搜救领域发挥了积极作用。
参考文献
[1]沈笑云,赵元浩,秦芹,等.通用航空搜救系统设计与实现[J].计算机工程与设计,2016,37(7):1958-1964.
[2]翁大涛,陈轩,张伟,等.浅谈我国海上搜救应急预案体系框架明.中国水运,2015,15(11):68-71.
[3]王俊,彭碧波.搜索救援行动的发展历程及启示[J].中国应急救援,2016,55(1):50-54.
[4]庞佑军.基于北斗卫星导航的搜救系统原理与构型[J].航空电子技术,2013,44(4):7-13.
[5]贠敏,葛榜军.北斗卫星导航系统及应用[J].卫星应用,2012,29(5):19-23.
[6]崔琳琳.基于Windows CE和北斗二代的嵌入式电子海图定位显示研究[D].大连:大连海事大学,2013.
[7]孙琳.北斗二代导航接收机的捕获跟踪技术研究[D].成都:电子科技大学,2016.
[8]赵晋.北斗二代卫星导航接收机关键共性技术研究[ D].上海:复旦大学,2012.
[9]张楠.应用于机载导航的北斗双模型接收机的设计与实现[D].北京:中国科学院大学,2016.
[10]袁建平,罗建军.卫星导航原理与应用[lull.北京:中国宇航出版社,2004.
