组合型家用厨房自动剁刀
2018-05-30天津职业技术师范大学工程实训中心田增印马栋财丛欢亭李光泽
天津职业技术师范大学工程实训中心 田增印 刘 鹏 马栋财 丛欢亭 李光泽 李 娜
1.机械结构
该设备采用stm32单片机以及机械结构实现智能自动化多功能调控系统综合控制,双刀头由一个直流减速电机通过可调行程双曲柄机构传动达到刀头上下移动的剁削目的,支撑刀头悬架由光轴与丝杠配合滑动以达到刀头左右移动的目的。
刀头采用金属不锈钢材质配制,刀的安装采用一键式锁紧轨道固定刀头,以实现刀的方便拆卸与清洗。
食物托盘采用方形实心竹制菜板,底部与双滑轨连接,实现菜板的移动与清洗。
设备外形包裹设计采用复合民用白色塑料材质,设计精巧美观实用。
设备操控面板分为:肉类精切、肉类切片、蔬菜切片、蔬菜切碎、快切、慢切、抬刀。可通过切换选项控制刀的切削力度与快慢实现刀自动调控。
2.电路设计
(1)复位电路
复位就是程序跑到了一半,按了一下复位键,程序就会从头开始重新跑。当按键按下时,会给NRST引脚一个低电平,STM32检测到这个低电平,就会复位重新跑程序。
(2)程序下载电路
STM32下载电路设计有两种,一种是JTAG下载,一种是SW下载。通过此电路把程序下载到STM32中。当没有低电平输入时,上拉电阻可保证输入端是稳定的高电平状态。如果没有上拉电阻,外界的低电平干扰很容易加到输入端上,使出现错误动作。而有的是下拉电阻,将输入端进行下拉接地,将输入处于低电平状态,输入端悬空时为高阻抗,外加高电平干扰很容易加到输入端上。
3.BTN7971电路及H桥原理
BTN7971是应用于大电流、半桥、高集成的驱动电动机芯片,它分别带有一个P、N沟道的高低边MOSFET,以及一个驱动IC。P沟道高边开关省去了电荷泵的需求,因而减少了周边环境对它的干扰。集成的驱动IC具有斜率调节、电流诊断、死去时间产生和过温、过流及短路保护、过压、逻辑电平输入的功能。BTN7971可输入电压4.5—25V,驱动电流可达到70A.。完全可以满足我们的需要。
BTN7971使用简单,不需要和分立元件搭建的H桥一样复杂,每片BTN7971就是一个半桥,两片BTN7971即可组成一个H全桥驱动电路。BTN7971的2管脚接输入的脉宽调制信号,4、8管脚分别接电动机的两级,1和7管脚之间接一个电解电容,并将1管脚接地,通过改变两路脉宽调制信号的占空比,使得输出两端产生电压差,电动机就会转动。
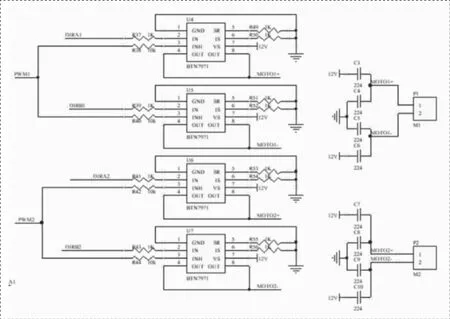
H桥驱动电路图

H桥驱动原理图
4.STM32CubeMX
程序编译器采用MDK5,该编译器源于德国的keil公司,是目前嵌入式设计的开发工具。STM32CubeMX是用图形配置向导生成C语言初始化代码,目的是为了减少开发人员的时间和成本。
在安装STM32CubeMX软件之前应先有Java运行环境,然后进入st官网即可下载。下载界面如图所示。点击获取软件即可。

下载STM32Cube软件包,使用在线下载方式即可,离线下载方式容易出现版本不匹配的现象。在下载软件软件包之前,还要设置安装的位置,运行软件,选择Help菜单的Updater Settings子菜单项,打开下载窗口点击下载即可,下载之后就可运行HAL标准库的函数。
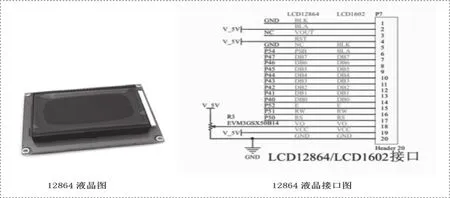
5.显示模块
液晶显示器(LCD)的主要原理是以电流刺激液晶分子产生点、线、面并配合背部灯管构成画面。各种型号的液晶通常是按照显示字符的行数或液晶点阵的行、列数来命名的。本次使用的是12864液晶,由128列、64行组成。
示例代码:

6.PID 控制电机调速
PID的常用微分公式如下:

其中:
Kp ——控制器的比例系数
Ti ——控制器的积分时间,也称积分系数
Td ——控制器的微分时间,也称微分系数

PID控制系统原理图
(1)比例部分
比例调节作用是按照比例分析系统出现的偏差,当系统出现偏差时,比例部分用来减少偏差。在模拟PID控制器中,比例环节的作用是对偏差瞬间作出反应。偏差一旦产生控制器立即产生控制作用,使控制量向减少偏差的方向变化。比例作用大,可以加快电机的调节,减少误差性,但是过大的比例会使系统的稳定性下降。
(2)积分部分
实际的控制系统除了希望消除静态误差外,还要求加快调节过程。在偏差出现的瞬间,或在偏差变化的瞬间,不但要对偏差量做出立即响应,而且要根据偏差的变化趋势预先给出适当的纠正。积分环节的调节作用虽然会消除静态误差,但也会降低系统的响应速度,以及增加系统的超调量。为了实现这一作用,可在PI控制器的基础上加入微分环节,形成PID控制器。
(3)微分部分
微分调节作用是反应系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此可以改变系统的动态性能。微分的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,特别对髙阶系统非常有利,它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分,或在微分起作用之前先对输入信号进行滤波。
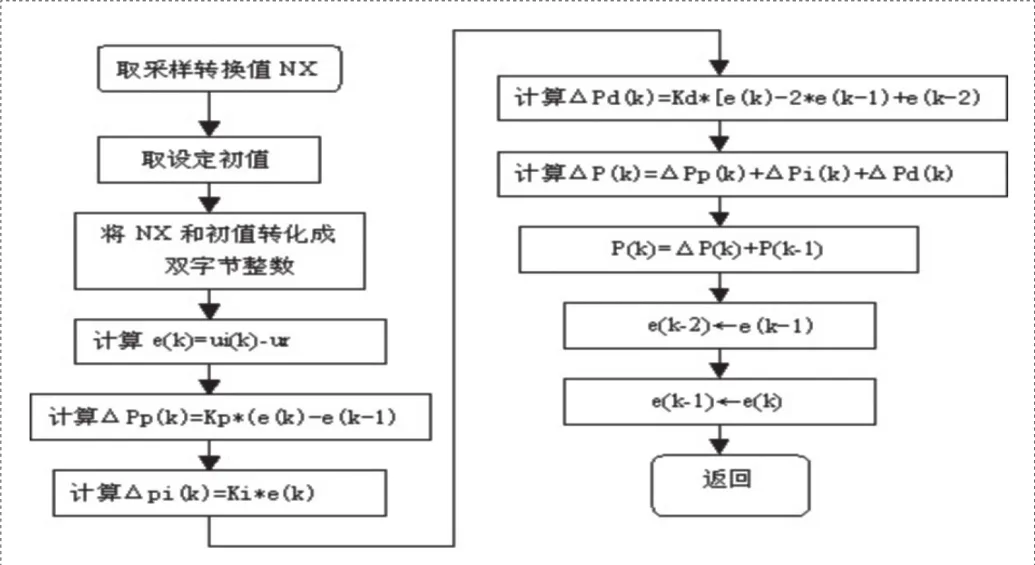
Pid算法流程图
示例代码:

[1]康华光,陈大钦,张林.电子技术基础[M].高等教育出版社,2005.
[2]李慧.机械结构设计与工艺分析[M].机械工业出版社,2012.
[3]隋金雪,杨莉,张岩.“飞思卡尔”杯智能汽车设计与实例教程[M].电子工业出版社,2014.
