面向交通监控的自适应背景模型
2018-05-30长春市规划编制研究中心关可汗
长春市规划编制研究中心 关可汗 赵 莹
1 算法描述
本文以卡尔曼滤波[1]为更新算法,在大津算法基础上提出虚拟像素点和双阈值概念,自动获取每帧图像最佳更新阈值进行更新。同时提出强制更新思想,对达到最大等待时间的前景予以强制更新,置换已失效背景。
本文建立自适应背景模型[2]的基本流程如图1所示。

图1 自适应背景模型流程图
卡尔曼滤波用来背景更新[3]有一定的局限性,此算法是一种一阶稳态系统,但是前景运动目标[4][5]的出现扰乱了这种稳态,卡尔曼滤波器把前景错误的当作背景来更新,导致更新失效。因此下文针对性的提出了选择性背景更新和强制背景更新概念,很好的解决了上述出现的具体问题。
1.1 选择性背景更新
选择性背景更新,是在有前景运动目标的地方不更新,其他地方实时更新背景。其基本思想是:

其中,M代表有无前景目标。
选择性更新的阈值是在前景灰度上统计得到的,获取前景灰度公式为:

其中,ΔF(x, y, t )为前景灰度值;C(x, y, t )为当前帧灰度值;B(x, y, t )为背景灰度值。公式(2)对应前景灰度分布图如图2所示。图中,出现图像灰度值小于0的像素点,是因为当前帧车辆灰度值低于背景灰度值。
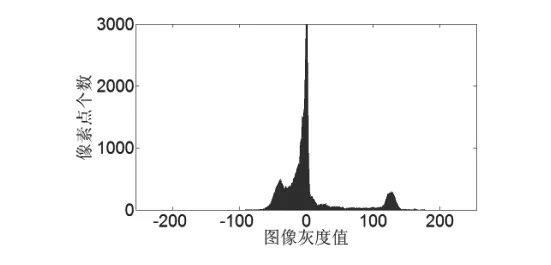
图2 前景图像灰度直方图
为了确定在M=0时背景更新的阈值,通常做法是对前景图像做绝对值处理,再手动或自适应算法获得该阈值,如图3所示。但是在前景正负灰度不对称的情况下,取绝对值操作必然导致车辆信息的丢失,图2中负数一侧表示深色车辆灰度取绝对值后,在图3中被“淹没”在背景更新阈值T以下,代表该车辆无法被检测到,因此得到的阈值不能真实的分割背景图像。

图3 传统算法获取阈值图
为此,本文对上述问题进行研究,提出了双阈值判断的概念,并针对一些特殊情况又提出了虚拟像素点的概念。
1.1.1 双阈值判断
双阈值判断建立在大津算法之上,大津算法就是在背景与前景目标两类中间找到一个最佳阈值T,该阈值使两类目标分错的概率最小,使类间方差最大。算法实现如下:

其中,ω0为前景点占图像比例;g0为前景平均灰度;ω1为背景点占图像比例;g1为背景平均灰度;N0为像素的灰度值小于阈值T的像素个数;N1为像素的灰度值大于阈值T的像素个数;图像的大小为M * N。带入 g 得最大图像类间方差:

当从最小灰度T = 0遍历255个灰度,使图像类间方差σ最大时,此时的灰度值T就是自动获得分割图像的最佳阈值。当前景目标之间灰度差异很大时,由于算法本身不考虑图像局部灰度特征,而是纵览全局得出最合适的阈值,导致部分前景被淹没在背景之中。
前景车辆目标不可避免的有白色车和黑色车同时出现的情况,白色车辆的出现使该帧阈值很大,使前景黑色车辆淹没在背景之中,非常不利于前景车辆的提取。因此,本文不对前景信息进行绝对值处理,在前景灰度图像上进行两次大津算法。如图4所示,前景图像灰度直方图正负灰度差分布不同,负数一边为车辆颜色低于地面灰度,正数一边为车辆灰度高于地面灰度。因高斯分布不同必然导致更新背景阈值不同。因此,本文在灰度分布直方图上进行两次大津算法,得到两个阈值T1、T2,在阈值限制范围内进行背景更新。

图4 本文算法获取阈值图
1.1.2 虚拟像素点
考虑到算法本身,当视频检测区域没有前景运动目标时,视频序列当前帧与背景做差得到的图像绝大部分像素点灰度值为零,此时应该提取不到任何前景,但经过大津算法二值化的图像强制错误的在灰度值为零左右的点得到阈值,导致全图像出现噪声。为了抑制噪声,我们需要在图像另一端构造出虚拟的前景,从数学上看,加入新的高斯分布是为了大津算法能够找到分割图像的阈值,而又不破坏背景图像。本文算法在每幅处理的图像中加入给定的虚拟像素点,这些虚拟像素点加在像素灰度值最大的点上。这些虚拟像素点不在图像中真正的存在,只是在计算得到阈值时遍历所有灰度中参与运算出现。作为虚拟像素点,他们的灰度值和数量这两个参数设置尤为重。1.检测区域没有前景运动目标时,作为虚拟前景物体出现,保证自适应阈值在一个合理范围。2.检测区域有前景运动目标时,虚拟像素点不会对自适应阈值造成影响。由于虚拟像素点的加入,造出了两个高斯分布,满足大津算法的应用要求,将计算得出的阈值作为背景更新范围反馈给卡尔曼滤波器进行背景更新。
1.2 强制背景更新
在视频检测中,经常出现因天气问题造成光照亮度的突然变化,导致路面的灰度变化被当做前景物体错误的检测出来,需要将已经变化的背景快速更新过来。本文为了解决此类问题,在卡尔曼滤波中加入了强制背景更新时间T,t是强制更新的等待帧数,若t小于经验值T,认为该像素点值为前景车辆,若t大于等于T,认为当前背景已经发生变化,立即更新背景。
2 仿真验证及结果分析
采用 VC+ + 9.0在OpenCV图像开发包的基础上实现本文提出的算法。试验是在 Intel Core i5 CPU,2.67GHz,4GB内存,Win7计算机上完成。使用的视频序列的图像分辨率为640×480,帧率为25fps。图5为某路段傍晚时刻视频加入双阈值判断前后处理结果。对比发现本文算法在光线昏暗条件下,背景未受到前景黑色、白色车辆影响,背景更新效果较好。

图5 某路段拍摄视频
如图6所示,图6(b)受到前景车辆的影响,部分背景融入了前景信息,图6(c)右侧车辆拖影被当作前景目标检测出来,背景更新效果较差。图6(d)与图6(e)分别为该帧视频背景更新效果图和前景目标检测效果图。对比发现,当车流量较大的路段传统背景更新效果较差,本文通过选择性更新及设定更新阈值方法背景更新效果较好。

图6 某路段拍摄视频
3 结束语
通常学者仅仅把研究背景模型的重点放在背景更新算法上,常常忽略了如何正确地选取背景进行更新,没有清晰地划分前景与背景的界限,再好的更新算法也只会事倍功半。本文背景模型从选择背景的更新范围为突破口结合大津算法,引入虚拟像素点和双阈值概念为特点,将得到的阈值用来选择性更新背景。本文背景模型算法解决了背景因突然光照变化不能及时更新的问题,同时在光照昏暗及车流量较大的情况下背景更新有较好的适应性,并且在车辆长期停靠和挺靠后驶离监控区域时,能够及时快速更新背景,相比传统背景建模具有较好的普适性。
[1]侯杰虎.基于kalman滤波器的视频运动目标跟踪算法研究[D].成都理工大学,2012.
[2]张运胜.基于视频的城市道路交叉口场景中车辆检测方法研究[D].东南大学,2016.
[3]邹承明,李伟.一种改进的自适应背景更新算法[J].武汉理工大学学报,2009,03:45-48.
[4]徐方明,卢官明.基于改进surendra背景更新算法的运动目标检测算法[J].山西电子技术,2009,05:39-40+71.
[5]陈雷.基于自适应背景模型的运动目标检测[D].北京交通大学,2016.
