一种基于数学形态学的点云地物提取方法
2018-05-30黄礼辉黄子懿
黄礼辉 黄子懿
(1.中铁第四勘察设计院集团有限公司,湖北武汉 430063;2.华中师范大学第一附属中学,湖北武汉 430223)
1 概述
近年来,随着激光LiDAR技术的不断发展,激光扫描仪的扫描精度、扫描速度、角度分辨率等硬件技术指标不断提高,获取的激光点云数据量也越来越大,可以达到亿级甚至百亿级。然而,相对硬件的快速发展,点云数据处理方法与处理软件的发展严重滞后,现有数据处理方法对于点云数据处理的交互性差,人工内业处理工作量大,严重影响数据处理效率,这成为制约激光扫描技术工程化应用进一步推广的瓶颈[1-4]。
针对这一问题,提出一种基于数学形态学的点云地物提取方法。首先将点云数据投影生成各类特征图像,采用数学形态学方法对图像进行分割标记,并将标记后的标签反投影到点云上,从而完成点云数据的分割提取。通过对点云数据中典型地物的自动分割提取,将复杂的扫描场景分割成独立地物点云集合,大大简化了点云数据的处理复杂程度,为后续的制图和建模等应用提供了便利条件。
2 地物提取流程
传统的直接基于点云数据空间几何特征和属性信息的地物提取方法因其需在三维空间进行运算处理,效率低下。而基于数学形态学的地物提取方法先将点云数据投影生成各类特征图像,应用图像处理的方法提取地物,再反投影到三维点云数据中。这使得算法更容易实现,计算速度更快。将点云数据投影生成特征图像后,就可以利用现有的大量图像处理工具,特别是数学形态学方法。数学形态学的基本运算包括膨胀、腐蚀、开运算和闭运算;基于这些基本运算还可推导和组合成各种数学形态学的实用算法,可广泛应用于包括图像分割、特征抽取、边缘检测等图像处理过程中[5,6]。
基于特征图像分割提取的主要流程:将点云投影生成的特征图像进行分割及分析提取,并将提取的标签反投影到点云上,从而完成点云数据的地物提取过程。操作流程如图1所示。

图1 点云数据地物提取流程
3 特征图像生成
特征图像是将点云数据经过投影并以灰度来表达某种特征的特殊数据结构,每个像素位置包含了投影点云的特征信息。其数据结构比较简单,将三维点云数据投影成图像后,更利于数据的可视化和快速处理。
点云特征图像是一种二维的数据结构,图像的每个像素位置包含了该像素范围内的点云特征信息。以下主要运用的特征图像是最大高程特征图像、最小高程特征图像、密度特征图像和高差特征图像。
首先根据点云数据的外包盒大小确定特征图像的范围,假设扫描区域点云数据的外包盒坐标大小分别为:Xmin、Ymin、Zmin、Xmax、Ymax、Zmax,则将整个点云区域投影到XOY平面,可将其分成W×H个格网,格网间隔大小为Cg,则有
(1)
在这个过程中,需要设置特征图像的空间像素尺寸(即格网尺寸),这个参数非常重要,如果定得太大,会丢失细节信息,导致地物欠分割;如果定得太小,会导致同一地物像素不连续,影响最终分割结果。
最大高程图像取格网中点云的最大高程作为灰度值。它是进行特征图像分割的基础参考数据。而密度特征图像统计了格网中点云的数量,高差特征图像则记录了格网中点云的高差范围,这两类特征图像在分割过程中起到辅助判别作用。三种特征示意如图2所示。
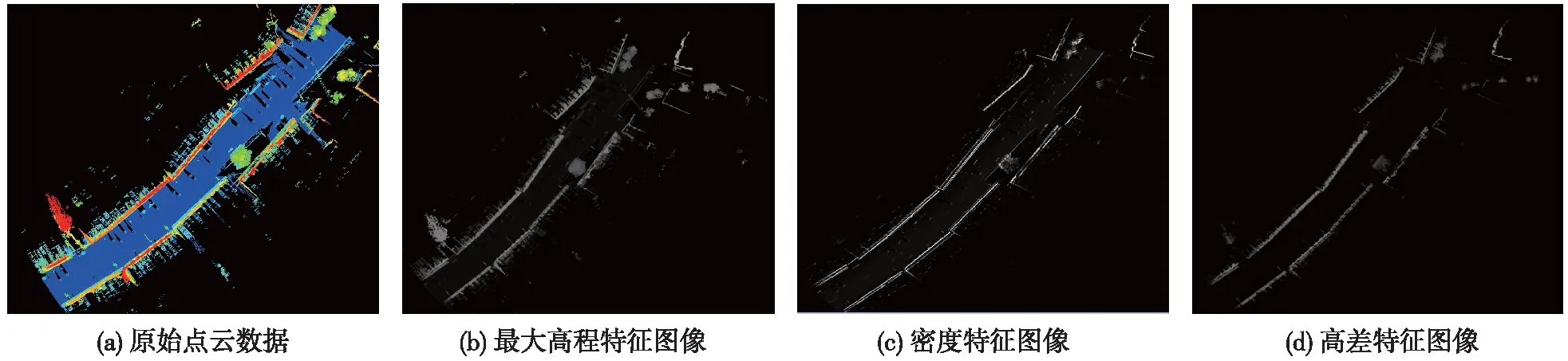
图2 分类点云特征示意
4 地物提取
激光扫描系统扫描获取的场景点云数据过于复杂,很难一次性对所有地物进行分割提取。在分析各类地物特征后,提出一种由粗到精、由易到难的层次化提取算法。该方法首先将点云数据划分为地面数据和非地面数据,然后从非地面数据中依次分割出建筑物、杆状物和其他地物。
4.1 地面检测
层次化提取方法第一步是将扫描场景中的地面数据提取出来。地面数据特征与其他地物特征差异较大,数据量在整个扫描场景中所占比例也很大,直接从扫描场景中提取地面点云比较容易实现,且能较大程度地降低后续点云数据分割的复杂程度。地面检测是基于特征图像分割方法的关键步骤,通过算法提取出地面数据后,地物将失去与地面的联系,成为独立的对象集合。通过图像分割的算法标记分割对象后,即可将分割标记反投影到点云上,从而到达地物点云分割的目的。
检测采用λ-flat区域标记算法。该算法首先做出以下定义:假设数字灰度图像f中相邻的两个像素p,q之差|fp-fq|小于给定阈值,则认为像素p,q属于同一平坦区域,如式(2)
∀(p,q)neighbors:|fp-fq|≤λ
(2)
属于地面的相邻像素高差通常较小,设置阈值λ为30 cm,即可将最大高程图像f中的地面像素标记为同一区域。一般情况下,取出高程图像中面积最大的标记区域即为地面区域。通过λ-flat区域标记算法分割出地面数据后,剩下的非地面数据就可作为地物分割的候选对象(如图3所示)。

图3 λ-flat区域标记算法地面检测
4.2 地物分割
地物分割是将点云数据分割成若干个互不相交的子集,即将点云数据中不同的地物对象划分成独立的地物点云集合,从而简化点云数据后续处理的复杂度。在使用λ-flat区域标记算法完成地面数据和非地面数据分割后,同样可以使用基于图像处理的方法对地物数据进行分割。地物在失去与地面的关联后,在空间上呈独立分布,通过连通区域计算即可完成独立地物的分割过程[7,8],计算步骤如下。
(1)获取经过λ-flat区域标记后的最大连通区域gm(f)。
(3)
(4)对待分割地物图像gs(f)进行连通分析,每个连通区域即为独立的地物对象,将标记反投影到点云数据上即可获得最终的点云分割结果。
图4(a)为经过步骤(2)空洞填补后反投影获取的待分割点云数据,图4(b)为最终的分割结果,不同的颜色表示不同的分割对象。
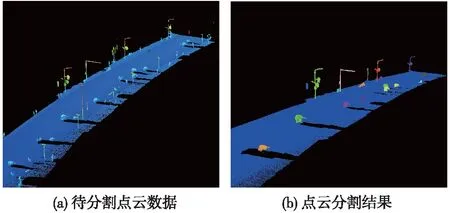
图4 点云地物分割
4.3 建筑物提取
完成地面检测和地物分割后即可对典型地物进行提取。首先提取建筑物点云,其点云数据投影生成的特征图像具有较大密度和高差,同时投影面积也较大[9-12]。提取步骤如下。
(1)将经过处理的点云数据分别投影成最大高程、高差和密度特征图像。
(2)设定高差图像和密度图像的提取阈值,高差特性图像阈值设定为大于3 m,密度特征图像阈值设定为大于50点/像素。将同时满足这两个条件的像素点作为建筑备选点。
(3)将所有建筑备选像素点生成二值图像,进行连通区域分析。删除连通面积较小的区域,剩余的像素点即为分割出的建筑区域。
(4)将建筑分割标记反投影到点云数据,即可达到建筑提取的目的。
4.4 杆状物提取
完成建筑物点云的提取后,可继续提取路灯、广告牌等杆状物。杆状物投影到特征图像上后也具备较大的高差和投影密度,但是投影面积很小。为了进一步区分杆状物中路灯、广告牌等细类。提出了“杆状度”的概念,用于表达地物杆状部分在地物整体中所占的比率。例如,路灯、广告牌的杆状度较高,树木杆状度适中,建筑、栏杆等的杆状度为零[13,14]。
杆状物提取同样也需要将点云数据投影为特征图像(利用杆状部分在特征图像上和其邻域点特征的差异进行提取)。这一过程会丢失地物的非杆状部分,需要再通过区域增长的方法实现非杆状部分的提取。提取步骤如下。
(1)将点云数据进行投影,分别得到最大高程图像、密度图像和高差特征图像。这里的密度图像是指将每个像素内的高差分成10等分,只要某一个等分间隔内包含点,该像素值就累加1。
(2)对特征图像上的高差特征和密度设定阈值,高差阈值为大于2 m,密度阈值大于8点/像素。然后提取满足特征要求的像素值,获取标记图像。
(3)对标记图像进行膨胀处理并进行连通区域分析,删除连通面积较大的区域,保留连通面积较小的区域,这些区域即为候选杆状区域。
(4)对候选杆状区域中的小块连通区域使用区域增长算法,寻找杆状物的非杆状部分,并进行标记。
(5)将特征图像上的杆状物进行标记并反投影到点云数据上,完成杆状地物的提取。
杆状物提取结果如图5所示。

图5 杆状地物提取结果
5 试验验证
为了验证基于数学形态学点云地物提取方法的有效性和适用性,选择某街区车载激光扫描获取的点云数据进行试验分析。研究区地物种类包括建筑、树木、路灯等典型地物,人工统计共有杆状地物47个,建筑物10个。通过本文算法分割提取出杆状地物44个,建筑物10个,综合提取精度为94.7%。其中,建筑物提取精度为100%,杆状物提取精度为93.6%。部分杆状物未被正确提取的主要原因是杆状物和其他地物空间距离太近,在地物分割的过程中没有被正确分割。
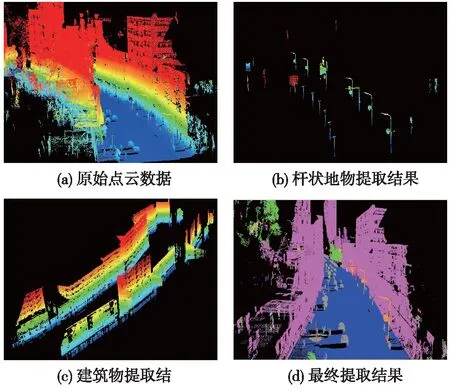
图6 地物提取试验结果
试验数据的提取结果如图6所示,图6(a)为原始扫描点云数据,图6(b)为杆状物提取结果,图6(c)为建筑物提取结果,图6(d)为最终的提取结果。从图6可以看出,采用本文方法不仅可有效地区分地面点云数据和非地面点云数据,对于建筑、杆状地物等典型特征地物也有较高的提取精度,其成果可为后续的矢量提取及三维建模提供有效的数据支持。
6 结论
点云数据的快速分割提取能够极大地提高点云数据的处理效率和自动化程度。传统的直接基于点云数据的地物提取算法因其数据量大而效率较低。本文提出的基于数学形态学的地物提取方法,通过投影转换为图像的处理方式,不仅能够高效地从复杂场景点云中提取兴趣目标,并且具备较高的提取精度,为拓宽激光点云数据的处理方法提供了一个新的思路,也为后续的自动化成图和建模操作奠定了技术基础。在今后的研究中,可进一步研究不同地物对象在特征图像中的表现特征,扩大地物自动化提取的类别,使本文算法的使用范围更加广泛。
[1] 欧新良,匡小兰,倪问尹.三维散乱点云分割技术综述[J].湖南工业大学学报,2010,24(5):45-49
[2] 杨耘,隋立春.面向对象的LiDAR数据多特征融合分类[J].测绘通报,2010(8):11-14
[3] 唐云龙.基于车载激光点云数据的典型地物分类与提取[D].北京:北京工业大学,2015
[4] 肖永飞.ALS70激光点云检校流程[J].铁道勘察,2011,37(6):37-40
[5] Golovinskiy A, Kim V G, Funkhouser T. Shape-based recognition of 3D point clouds in urban environments[C]∥IEEE, International Conference on Computer Vision. IEEE, 2010:2154-2161
[6] Pu S,Vosselman G.Automatic extraction of building features from terrestrial laser scanning[J]. International Archives of the Photogrammetry,Remote sensing and Saptial Information, 2006,5(36)
[7] 张齐勇.基于区域增长的LiDAR点云数据DEM提取[J].铁道勘察,2015(2):14-17
[8] 吴杭彬,刘春.基于数学形态学的LIDAR数据分割和边缘提取[J].遥感信息,2008(4):27-32
[9] 郎悟灵.基于改进的形态学滤波与区域增长法的建筑物点云数据提取方法研究[D].成都:西南交通大学,2012
[10] 程效军,程小龙,胡敏捷,等.融合航空影像和LIDAR点云的建筑物探测及轮廓提取[J].中国激光,2016(5):247-255
[11] 徐文学.基于标记点过程的机载激光扫描点云建筑物提取[D].武汉:武汉大学,2013
[12] 王果.不同平台激光点云数据面状信息自动提取研究[D].北京:中国矿业大学(北京),2014
[14] Serna A, Marcotegui B. Detection, segmentation and classification of 3D urban objects using mathematical morphology and supervised learning[J]. Isprs Journal of Photogrammetry & Remote Sensing, 2014,93(7):243-255
