舞台机械飞行机构防摇摆技术
2018-05-30龚建兴
龚建兴,唐 刚
(1.甘肃工大舞台技术工程有限公司,甘肃 兰州 730050;2.成都艾德特舞台工程有限公司,四川 成都 610015)
舞台机械飞行机构装置主要用于舞台空中杂技表演,可移动、可升降,其结构与起重机类似,由吊具(升降)、平移小车组成。根据其用途,在舞台机械专业中被称为飞行机构。飞行机构升降吊具与平移机构采用钢丝绳连接,因此,吊具在移动过程中会出现摇摆现象,为了保证演出的艺术效果、演员的安全以及飞行机构移动中尽量不影响演员的动作,飞行机构的防摇及定位控制技术也得到了越来越广泛的关注。
1 防摇摆理论
1.1 摇摆的产生
飞行机构在加减速的过程中,吊物的运动总是落后平移小车的运动,从而在平移小车与吊物间形成夹角,在重力的作用下,速度变化时吊物会形成来回摇摆的现象。
1.2 防摇摆方法
防摇摆方法主要有机械防摇摆、电气控制防摇摆。机械防摇摆需要增加机械设备,导致飞行机构自重增加且造价昂贵,因此很少采用。电气控制防摇摆分闭环控制和开环控制。闭环控制需要有摆角测量装置,配合控制算法实现;开环控制无需角度测量装置,通过控制算法即可实现对行车的防摇摆控制,因此,这也是目前使用最广泛的防摇摆方法。开环防摇摆的控制算法有好几种,笔者介绍的控制系统采用最为常用的一种控制方法,速度防摇摆控制算法。由于速度防摇摆控制基于开环算法,因此不适合户外飞行机构,风力影响大。
1.3 速度防摇摆控制原理
防摇摆控制是利用钟摆原理,通过PLC控制器的防摇摆算法,控制发送给变频器的速度命令信号而连续限制摆动。通过检测吊钩的起升高度来计算摆动的角度,然后通过给定的加速度和减速度来减小或抵消摆角,从而控制摇摆角度,实现防摇摆控制。防摇功能激活与防摇功能不激活情况下速度与时间的关系曲线见图1和图2。
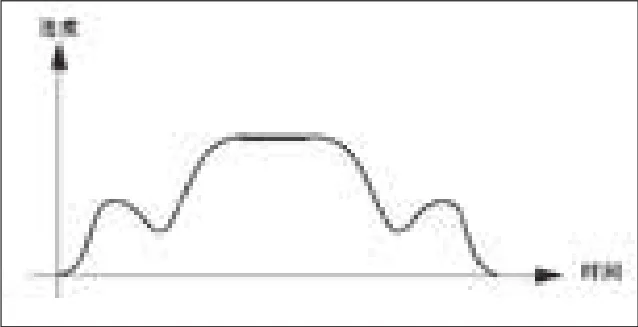
图1 防摇功能激活时速度与时间关系曲线
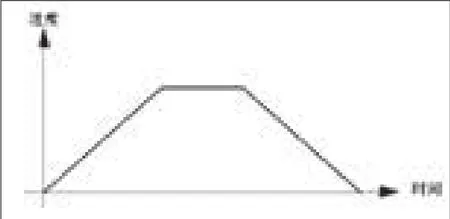
图2 防摇功能不激活时速度与时间关系曲线
2 飞行机构防摇摆控制系统组成
防摇控制系统主要由PLC控制器、变频器、监控软件、编码器等组成。其速度防摇控制算法在PLC控制器中实现,下面以实际运用项目银川演艺中心飞行机构为例做具体介绍。
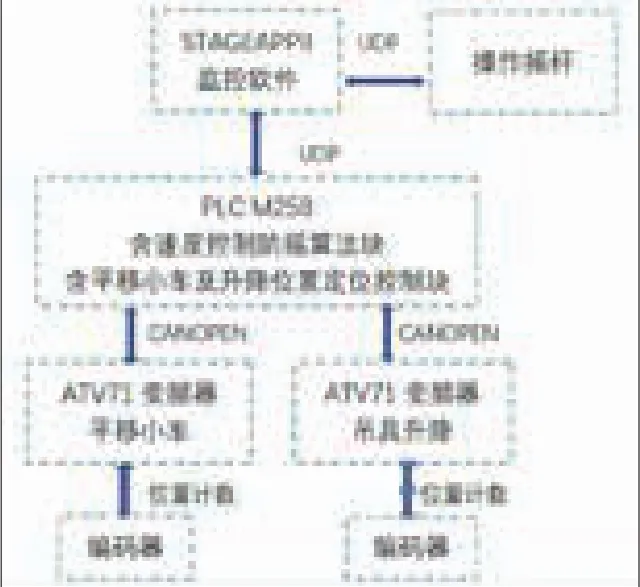
图3 系统配置及网络结构图
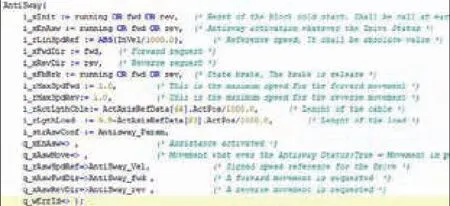
图4 PLC编程过程
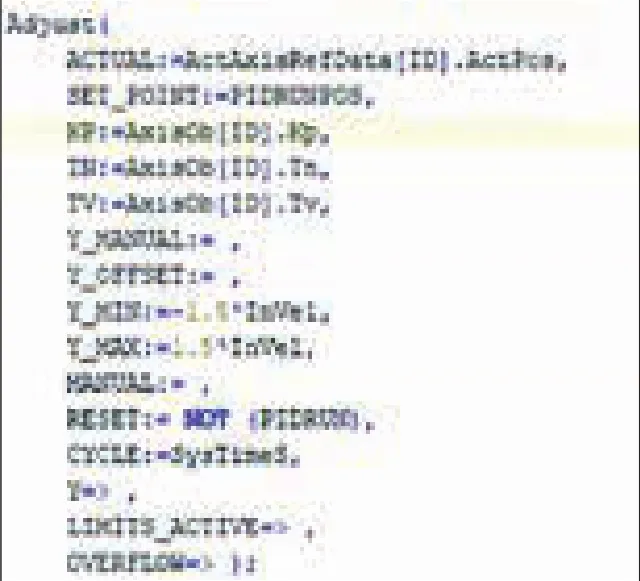
图5 PID运动控制定位库
图6 上位机监控软件视图一
2.1 系统配置
上位机监控软件使用STAGEAPPII(使用VS.NET开发),PLC使用施耐德M258,变频器使用施耐德ATV71重载产品,使用增量式编码进行位置检测及控制,系统配置及网络结构图见图3。
2.2 PLC控制器防摇摆控制库
本项目将速度控制防摇摆算法写成库的形式调用,使用方便。PLC编程软件采用施耐德SoMachine V4.2版本,利用ST结构化文本编写,见图4。
2.3 定位控制库
由于ATV71变频器自身不带定位功能,因此,定位算法依然在PLC控制器中实现。吊具升降属于垂直升降运动,故直接采用PID运动控制定位算法实现,PID运动控制定位库见图5。
飞行机构平移小车定位功能不能使用传统的PID运动控制,本方案中利用防摇及PID运动控制器结合的方式且进行了部分调整后实现了防摇和定位的结合,控制精度能达到±25 mm,对于舞台飞行机构应用而言已经满足需求。
2.4 上位机软件功能
上位机监控软件使用STAGEAPPII,该监控软件使用VS.NET基于Windows开发,可运行于WindowsXP/Windows7/Windowsvista等操作系统,监控软件主要用于设备命令(启停、速度、位置命令)的下发、设备状态监控及参数设置等,见图6和图7。

图7 上位机监控软件视图二
3 结束语
通过银川演艺中心飞行机构项目的实际运用,验证了速度开环防摇控制算法可以有效控制吊具的摇摆幅度,实际运用中从0~100%的速度运行,摇摆幅度均在±1.5°范围内,实现了防摇功能。由于该控制方案属于开环控制,因此,其防摇效果受外界影响较大,如飞行机构平移小车在移动前需要尽量保持静止,且不适合在户外有风的环境下使用。
[1]蒋国仁主编. 岸边集装箱起重机[M]. 武汉:湖北科学技术出版社,2001.
[2]高淑玲等. 桥式吊车防摆控制[J]. 自动化技术与应用,1988,7(1):1-4.
