四轮独立驱动电动汽车四轮转向和横摆力矩联合控制仿真
2018-05-29王云超
徐 坤,王云超,沈 建
(集美大学机械与能源工程学院 ,福建 厦门 361021)
0 引言
四轮独立驱动电动汽车是一类将驱动装置安装在车轮里或车轮附近的新能源汽车,由于其各个车轮具有独立可控的特点,因此为车辆操纵稳定性控制带来了较大优势。针对四轮独立驱动电动汽车的特点,直接横摆力矩控制(direct yaw moment control,DYC)成为该领域研究的热点,其解决了轮胎侧向力接近附着极限或达到饱和状态时,车辆丧失动力学稳定性的问题[1]。同时,由于四轮转向(four-wheel-steering,4WS)技术可以在低速时有效减少转弯半径,是改善汽车操纵稳定性及提高行驶安全性的常用有效的主动底盘控制技术[2],四轮转向和直接横摆力矩联合控制成为一个重要的研究方向。国内外学者分别利用最优控制[3]、鲁棒控制[4]、滑模控制[5]等进行四轮转向和横摆力矩联合控制方面的研究,获得了较好的集成效果。模糊控制具有不依赖被控对象精确数学模型的特点,可用于难以精确建模的非线性系统的控制,近年来在汽车控制领域被广泛运用。文献[6]使用模糊控制器对转向系统和直接横摆力矩系统进行协调,仿真表明,车辆车身质心侧偏角减少的同时,还可以跟踪目标横摆角速度。文献[7-8]均使用模糊控制方法研究四轮转向和横摆力矩联合控制,结果表明,联合控制提高了车辆的稳定性和安全性。但以上方法忽略了普通模糊控制器参数和控制规则固定,自适应能力差的缺陷[9]。本文利用参数自校正模糊控制器在线修正模糊控制参数,进行四轮转向和横摆力矩联合控制研究,并通过Matlab/Simulink与CarSim联合仿真实验对控制策略进行仿真验证。
1 四轮转向和横摆力矩联合控制框图

图1为本文设计的联合控制框图,包括参考模型、4WS模糊控制模块、DYC模糊控制模块、力矩分配模块及CarSim整车模型。为使整车获得理想的转向特性,参考模型使用线性二自由度模型,根据车速和前轮转角δf计算出车辆稳定性控制所需的期望横摆角速度值γd和期望质心侧偏角βd,通过4WS模糊控制和DYC模糊控制模块分别计算出后轮转角δr和附加横摆力矩M,根据总的目标驱动力矩T和附加横摆力矩M,经力矩分配模块合理分配四轮驱动力矩给四个轮毂电机,实现车辆驱动。
2 四轮转向和横摆力矩联合控制系统设计
2.1 参考模型
线性二自由度模型能够较好反映车辆稳定行驶状态,且避免了传统四轮转向控制带来的驾驶操纵困难[10],本文采用二自由度模型作为参考模型,将其理想横摆角速度和质心侧偏角输出作为车辆稳定状态与轨迹跟踪的期望值,线性二自由度模型理想横摆角速度响应为[11]
γd=min{|(u/L)δf/(1+ku2)|,|0.85·μg/u|}sign(δf),
k=(m/L2)-((a/k2)(-b/k1))。
式中:u为车辆质心速度沿纵向分量;L为轴距;k为稳定性因数;μ为路面附着系数;a和b分别为车辆质心到前轴和后轴的距离;k1和k2分别为前后轮侧偏刚度。
通常情况下车辆质心侧偏角越小越好,本文取期望质心侧偏角βd为0。
2.2 模糊控制模块设计
模糊控制结构主要包括:变量模糊化、模糊推理、去模糊化。本文采用两个模糊控制模块分别进行四轮转向和横摆力矩控制。由于模糊控制模块参数和控制规则固定,自适应能力差,因此,本文采用了参数自校正模糊控制器在线修正模糊控制参数。
四轮转向模糊控制模块采用横摆角速度期望值和横摆角速度反馈值的差值e(γ),以及质心侧偏角期望值和质心侧偏角反馈值的差值e(β)作为控制器的输入,后轮转角δr为控制输出,设定横摆角速度差值e(γ)论域为[-1,1],设定其量化因子ke为1,将差值e(γ)的输出论域分为七个模糊集:{NB,NM,NS,Z,PS,PM,PB},设定质心侧偏角差值e(β)的论域为[-3,3],量化因子kb为1,将e(β)的输出论域分为七个模糊集:{NB,NM,NS,Z,PS,PM,PB},设定后轮转角的论域为[-3,3],比例因子ku为1,模糊集为:{NB,NM,NS,Z,PS,PM,PB},均采用三角形函数为输入输出的隶属函数。模糊规则如表1所示。
横摆力矩模糊控制模块采用横摆角速度差值e(γ)及其差值变化率ec(γ)作为控制器的输入,附加横摆力矩M作为控制器输出,横摆角速度差值e(γ)论域为[-1,1],设定其量化因子ke为1。
将差值分为七个模糊集:{NVB,NB,NM,NS,Z,PS,PM,PB,PVB},设定横摆角速度差值变化率ec(γ)的论域为[-60,60],量化因子kec为1,模糊集为:{NB,NM,NS,Z,PS,PM,PB},设定附加横摆力矩M的论域为[-1,1],比例因子kv为1,模糊集为:{NB,NM,NS,Z,PS,PM,PB},采用三角形函数为输入输出的隶属函数,经过反复调试后建立了如表2所示模糊规则表。
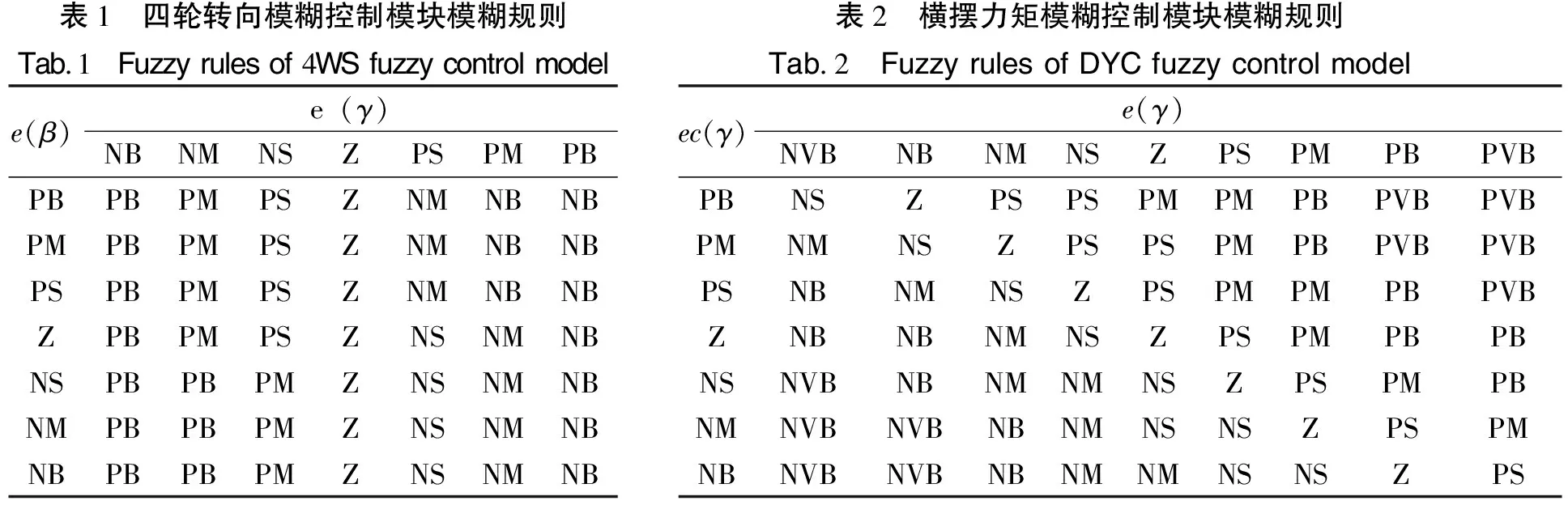
表1 四轮转向模糊控制模块模糊规则Tab.1 Fuzzy rules of 4WS fuzzy control modele(β)e(γ)NBNMNSZPSPMPBPBPBPMPSZNMNBNBPMPBPMPSZNMNBNBPSPBPMPSZNMNBNBZPBPMPSZNSNMNBNSPBPBPMZNSNMNBNMPBPBPMZNSNMNBNBPBPBPMZNSNMNB表2 横摆力矩模糊控制模块模糊规则Tab.2 Fuzzy rules of DYC fuzzy control modelec(γ)e(γ)NVBNBNMNSZPSPMPBPVBPBNSZPSPSPMPMPBPVBPVBPMNMNSZPSPSPMPBPVBPVBPSNBNMNSZPSPMPMPBPVBZNBNBNMNSZPSPMPBPBNSNVBNBNMNMNSZPSPMPBNMNVBNVBNBNMNSNSZPSPMNBNVBNVBNBNMNMNSNSZPS
2.3 参数自校正模糊控制器设计

一般参数自校正模糊控制器的控制结构如图2所示。在常规模糊控制器中量化因子和比例因子都是固定的,当出现较大误差时,动态响应速度受到限制,对于各种工况的适应性较差,为了改善系统性能,提高系统的自适应能力,在线实时修正量化因子和比例因子,本文针对四轮转向模糊控制器和横摆力矩模糊控制器设计了相同的参数自校正模块。
对于四轮转向参数自校正模块,输入变量为e(γ)和e(β),输出变量为量化因子ke和kb的增减倍数N1(即比例因子ku的减增倍数),设定N1的论域为{0.125,0.25,0.5,1,2,4,8},模糊集定义为{CH(高缩)、CM(中缩)、CL(低缩)、Z(不变)、AL(低放)、AM(中放)、AH(高放)}。当e(γ)和e(β)值较大时应尽快消除误差,即通过减小ke和kb,来降低对输入量的分辨率,同时增大比例因子ku,加快响应速度。当输入e(γ)和e(β)较小时,系统接近稳态,通过提高量化因子和降低比例因子来提高系统精度,减少超调量[12]。横摆力矩参数自校正模块也采用同样方法,其输入变量为e(γ)和ec(γ),输出变量为量化因子ke和kec的增减倍数N2。N2的论域和模糊集定义与N1相同,两个参数自校正模块的模糊控制规则如表3所示。
2.4 力矩分配模块设计

表3 参数自校正模糊规则Tab.3 Parameter self-adjusting fuzzy rulese(β)/ec(γ)e(γ)NBNMNSZPSPMPBPBCHCMCLZCLCMCHPMCMCLZZZCLCMPSCLZALAMALZCLZZZALAHALZZNSCLZALAMALZCLNMCMCLZZZCLCMNBCHCMCLZCLCMCH
力矩分配模块将车辆总的目标驱动力矩T和经DYC模糊控制模块输出的附加横摆力矩M合理分配给四个轮毂电机。本文将附加横摆力矩平均分配给四个车轮,同时考虑轮毂电机受到最大驱动转矩Tmax的限制,则各轮驱动转矩为:
T1=T/4-M×r/2B,T2=T/4+M×r/2B,
T3=T/4-M×r/2B,T4=T/4+M×r/2B;
T1≤Tmax,T2≤Tmax,T3≤Tmax,T4≤Tmax。
其中:T1,T2,T3,T4分别为左前、右前、左后、右后四个车轮的驱动转矩;r为轮胎滚动半径;B为轮距。
3 仿真试验与验证
为了验证控制算法的效果,选取CarSim车体动力学仿真软件中的D级SUV进行Matlab/Simulink与CarSim联合仿真试验,针对低速急剧双移线工况和高速连续正弦工况进行仿真分析。该模型车质量为1 509 kg;簧载质量为1 429 kg;质心高度为0.67 m;质心到前轴距离为1.05 m;轮距为1.565 m,轴距为2.619 m;车轮滚动半径为0.357 m;汽车绕Z轴转动惯量为1 767 kg·m2;轮毂电机最大驱动转矩为200 N·m。
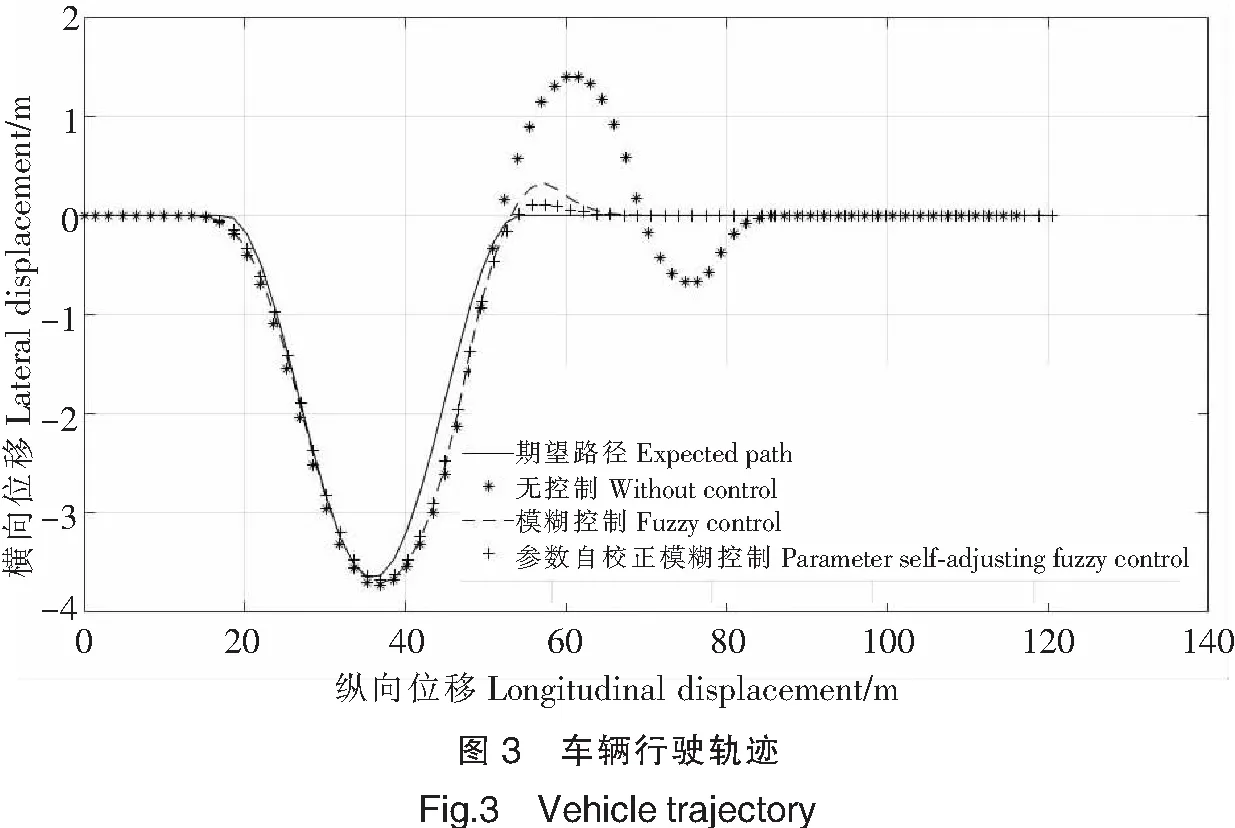
3.1 低速急剧双移线工况
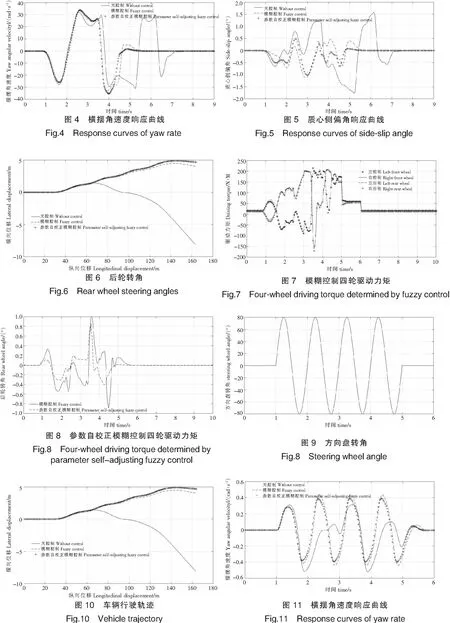
车速设置为50 km/h,路面附着系数设为0.75,路径设定如图3所示。CarSim中自带的驾驶员模型可以根据路径计算出车辆实时方向盘转角。从图3中可以看出,无控制的车辆较大地偏离了期望路径,参数自校正模糊控制较模糊控制能更好地跟踪期望路径。图4可以看出,参数自校正模糊控制下的车辆横摆角速度略大于模糊控制下的车辆横摆角速度,车辆的机动性更好。图5中显示无控制的车辆质心侧偏角明显大于模糊控制和参数自校正模糊控制。图6为模糊控制和参数自校正模糊控制下的车辆后轮转角,与横摆角速度对比后发现,后轮转角与横摆角速度趋势相反。图7~图8分别为模糊控制和参数自校正模糊控制的四轮驱动力矩,转弯时内侧车轮和外侧车轮具有明显的差力效果。
3.2 高速连续正弦工况
设置车速为100 km/h,路面附着系数为0.4。
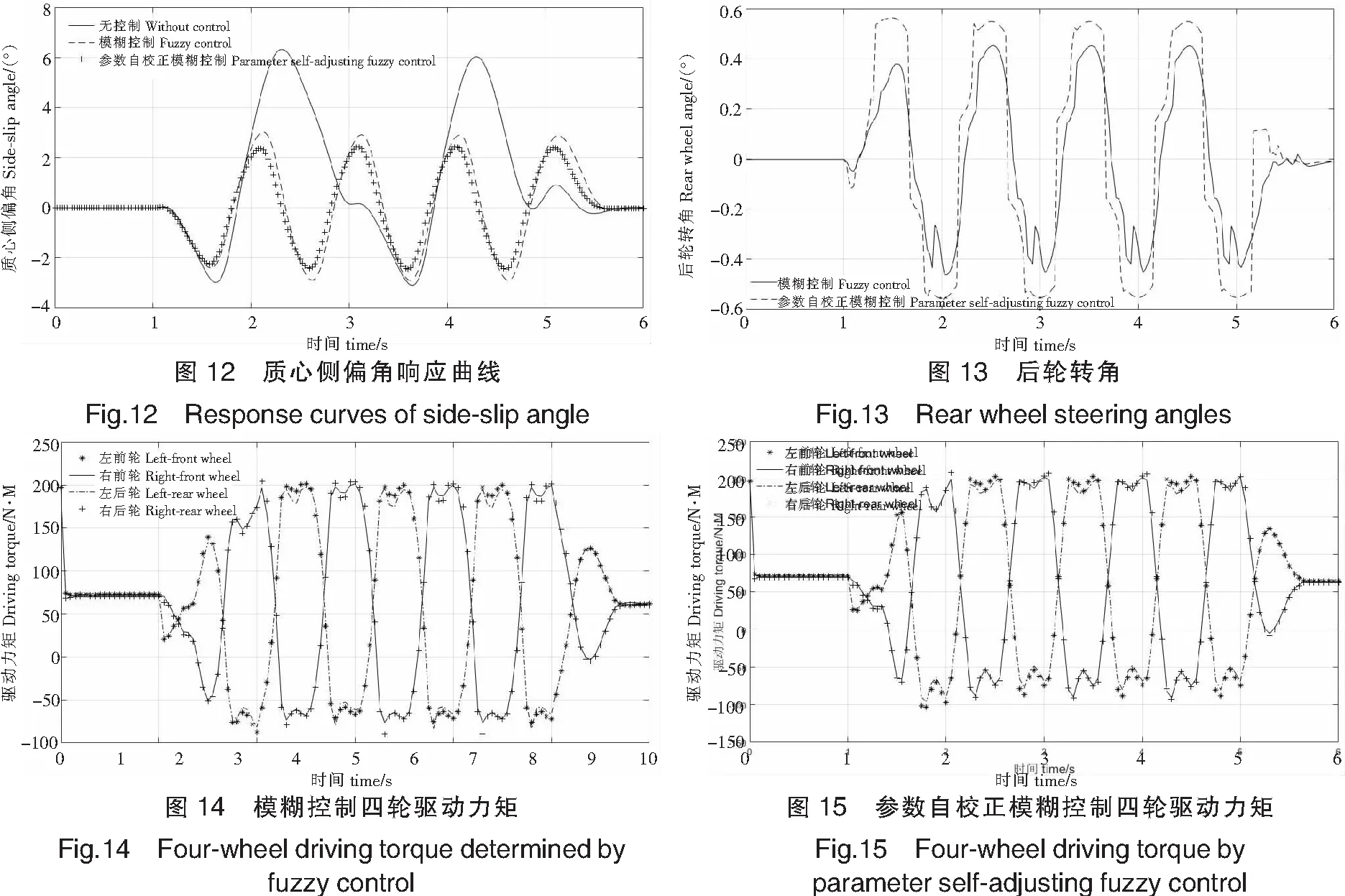
从图10~图12可以看出,无控制车辆在连续转向过程中发生了严重滑移,且车辆质心侧偏角较大,而模糊控制和参数自校正模糊控制的车辆控制效果较好,其中参数自校正模糊控制相对于模糊控制车辆横摆角速度和质心侧偏角都略小,说明在高速正弦工况下,参数自校正模糊控制的稳定性能更好。图13为连续正弦工况下模糊控制和参数自校正模糊控制下的车辆后轮转角,与横摆角速度对比后发现,后轮转角与横摆角速度趋势相同。图14~15分别为模糊控制和参数自校正模糊控制的四轮驱动力矩,两者变化趋势相同,且转弯时内侧车轮和外侧车轮差力效果明显。
4 结语
本文利用参数自校正模糊控制器在线修正模糊控制参数,进行四轮转向和横摆力矩联合控制研究,并通过Matlab/Simulink与CarSim联合仿真模型对控制策略进行仿真对比分析和验证。通过对比低速急剧双移线和高速连续正弦工况下的无控制、有参数自校正模糊控制和无参数自校正模糊控制三种控制策略发现:模糊控制和有参数自校正模糊控制效果明显好于无控制车辆,且利用参数自校正模糊控制的四轮转向和横摆力矩联合控制与模糊控制相比,提高了低速机动性和高速稳定性。
[]
[1]宋宇,陈无畏,陈黎卿.车辆稳定性系统与四轮转向系统集成控制研究[J].中国机械工程,2014,25(20):2788-2794.
[2]刘启佳.四轮转向汽车侧向动力学最优控制和内外环联合控制研究[D].北京:北京理工大学,2014.
[3]汪东明.基于DYC控制的4WS汽车操纵稳定性研究[J].现代机械,2009(6):42-45.
[4]殷国栋,陈南.四轮转向车辆控制系统操纵稳定性道路试验[J].中国公路学报,2009,22(6):116-120.
[5]邱浩,董铸荣,雷正保.四轮独立驱动电动车ARS与DYC集成控制与试验[J].江苏大学学报(自然科学版),2016,37(3):268-276.
[6]SONG J.Integrated control of brake pressure and rear-wheel steering to improve lateral stability with fuzzy logic[J].International Journal of Automotive Technology,2012,13(4):563-570.
[7]李彬,喻凡.四轮转向和差动制动联合控制的车辆横摆动力学[J].农业机械学报,2008,39(12):1-6.
[8]陈东,童贻银,武楠.电动车四轮转向与差动驱动的联合仿真研究[J].制造业自动化,2015(20):90-94.
[9]李刚,韩海兰.四轮轮毂电机电动车横摆力矩参数自调整模糊控制[J].华侨大学学报(自然科学版),2015,36(4):365-370.
[10]殷国栋,陈南.四轮转向直接横摆力矩鲁棒集成控制仿真研究[J].系统仿真学报,2008,20(16):4264-4268.
[11]邱浩.四轮独立驱动电动车ARS与DYC集成控制与实验研究[D].长沙:长沙理工大学,2015.
[12]董景新,吴秋平.现代控制理论与方法概论[M].北京:清华大学出版社,2016.