GPS标准定位服务偏移误差的预测和改善∗
2018-05-29张宝军王亚辉
张宝军 王亚辉
(西安邮电大学电子工程学院 西安 710000)
1 引言
GPS(Global Positioning System)是一种使用卫星信号进行定位的定位系统。由于它的稳定性和实用性,GPS得到了快速的发展,经常被用于各种各样的情况[1]。SPS是GPS测量中一种简单的方法,虽然它的定位精度比不上差分GPS和RTK-GPS(Real-time Kinematic),但它更加简单和廉价。尤其是在SA政策被禁用之后,它的定位精度有了进一步的提高,由于这个原因,SPS又一次引起了公众极大的关注。因此,我们要进一步改善SPS。
通过SPS获得的定位往往都是在真正位置发生偏移以后,这样就会导致定位精度的下降,文献[2]提出了BDS/GPS组合相对定位方法,通过在伪距双差和载波相位相对定位两种算法的基础上,编写BDS/GPS定位程序处理实测的BDS/GPS短基线数据来提高GPS定位精度。文献[3]采用网络伪距差分方法,利用网络将多个基准站的伪距改正数实时传输给流动站,并内插流动站改正数,提高定位精度的同时扩大差分范围,该方法提高了常规伪距定位精度,实现了实时分米级定位。虽然定位精度提高,但是并没有减少它的漂移误差。
本文研究的内容是减少SPS定位的漂移误差,该方法就是从GPS接收的卫星信号得到的。这种方法的优点是仅仅使用卫星接收信号的仰角和方向,通过这样一个简单的方法就可以提高和改善漂移误差。
2 GPS测量的基本原理
简要的介绍一下GPS定位的基本原理和方法[4~6]。在GPS定位中,一个GPS接收机至少要接收4颗或者4颗以上的卫星信号,图1向我们展示了GPS接收机接收卫星信号的一个简单的示意图。
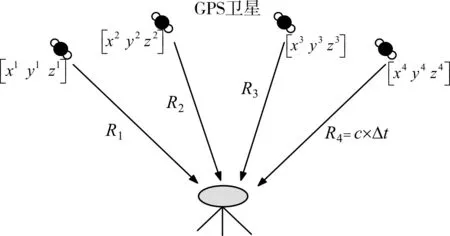
图1 GPS接收机接收卫星信号示意图
由图1可知,GPS卫星到GPS接收机之间的距离可以用光速和卫星信号传播的时间来表示。
式(1)是它们之间距离的表达式:

在式(1)中,S表示的是由于卫星钟差和接收机钟差导致的传播距离的误差。传播时间和卫星的三维位置坐标是卫星星历中解算出来的,它们是已知的量,而接收机的三维坐标位置和由于时差导致的传播距离误差S是未知的变量。由式(1)可知,该方程有四个未知量,在解算的过程中,就需要接收至少四颗卫星的信号才可以组成一个方程,进行结算。通过对这个新组成的方程进行计算,就可以得到接收机的三维位置坐标(x,y,z)。在真正的应用当中,GPS接收机和卫星之间的距离包含着各种各样的误差,结算出来的结果也不是接收机真正的位置,也包含着一定的误差。
3 定位实验的结果
通过定位实验我们发现,SPS的定位结果从真实的位置向几个方向发生偏移,其偏移量也是不固定的,随着不同的定位时刻,也是变化的。而且,SPS的定位结果没有从我们定位的平均位置向下移动。
我们猜想,这一事实产生的原因可能是受到了卫星分布位置的影响。接下来,将用一些预测方法来预测和改进该偏移误差。
4 偏移误差估计
在查找偏移误差的原因的过程中,我们认为,SPS误差因子中的任何事物都可能与偏移误差有关。通过分析,将SPS中的误差因子进行分类,并通过模拟来检查每个因子的影响。

表1 GPS误差因素
在表1中,SPS表示的是各种误差因素给标准定位服务带来的误差;SPS与SA表示的是各种误差因素在没有禁用SA政策时,给定位误差带来的误差;PPS表示的是各种误差因素给精密定位系统带来的误差。该表描述的误差是进行SPS定位时引起的。该表显示了每个误差因子对定位结果产生的影响。
接下来,将表1中的各种误差分为两组。一组是随机误差,另一组是跟仰角相关的误差。其中卫星的轨道信息、卫星时钟、多径效应和接收机噪声属于随机误差[7~11]。电离层延迟和对流层延迟所引起的误差取决于仰角[12]。
为了研究它们每一种对定位造成的误差,将这些误差逐一添加到模拟定位仿真当中,并检查它们每一种所施加的影响。在使用的式(2)中,将误差添加到卫星和接收机的真实距离当中,并用式(1)将接收机的三维坐标位置解算出来。

在式(2)中,dk表示的是卫星时钟误差、dd表示的是电离层误差、dt表示的是对流层误差、dm表示的是多径效应误差、dj接收机噪声误差。dx、dy、dz表示的是卫星轨道信息误差。以上参数中,分别使用具有适当平均值和方差的正态分布。
电离层误差参数dd可以通过式(3)来做近似的表示。天顶方向上的延迟量ΔL是由GPS的频率和临界频率所决定的。并且电离层误差参数dd变化是跟仰角有关的。

在式(3)中,为电离层高度,f为GPS载波频率,临界频率,θ为仰角。
对流层误差参数 dt可以用式(4)来近似表示[4]:

由式(4)可知,对流层参数dt与仰角θ成反比。
按照上述误差进行模拟仿真,仿真结果图如图2和图3所示。由于随机误差的存在,仿真结果不是一个点,而是散布在坐标原点位置的周围。

图2 随机误差的影响

图3 跟仰角有关误差的影响
由于误差是跟仰角有关的,仿真结果相对于真实位置发生了偏移。我们了解到,在SPS进行定位时,电离层延迟误差和对流层延迟误差取决于定位结果从真实位置发生的仰角偏移量。考虑到偏移的方向和偏移的量,我们认为,卫星的分布影响了偏移误差的结果。
5 实验与模拟对比
用GPS模块进行了几次简单的实验,并且,在实验过程中,在同一个地点在不同的时间段内进行了测量。我们得到了这些数据,当前的纬度、经度、卫星的仰角、方向角和信号噪声比等参数。
我们进行了模拟仿真实验,在该仿真实验中,其卫星的分布与真实实验中的卫星分布是相同的。从模拟仿真实验的结果中,我们预测了偏移的方向和偏移的量,我们使用实验值和模拟值之间的距离和角度作为索引,同模拟实验进行比较。得到图4。

图4 实验和模拟仿真的对比
该定位实验进行了17次,表2显示了这个结果。表2显示了模拟和实验的位移方向和位移值,并且还显示了实验值与模拟值(dr)之间的距离和角度(dθ)之间的距离。

表2 实验和模拟之间的对比
如表2所示,大多数数据的参数dθ都是在30°以内发生变化,由此,我们可以精确地预测偏移的方向。当考虑到偏移量的时候,存在一个比真实值更大的一个值。
在图5中,x轴代表 dr,y轴代表 dθ,并且,画了一个包括所有点在内的一个椭圆,正如在这个椭圆中看到的那样,它已经开始向侧面延伸。dr的值比dθ的值要差,在进行定位时,可以减小这种椭圆的尺寸,就可以成为提高精度的指标。
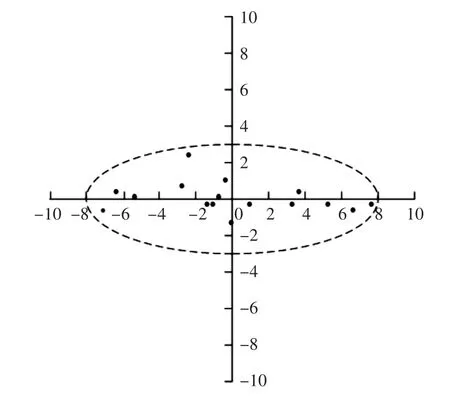
图5 dθ与dr之间的对比
最后,我们选择了预测偏移方向和偏移量的结果,并修改了它们实际的定位结果,从实验中减去模拟的偏移值。表3显示了修改前后的结果。

表3 偏移误差修改后
在表3中我们可以看出,修改前后的值发生了很大的变化,修改后的值明显小于修改前的值,大约可以将错误减小50%。由于修改后的值相对于修改前的值距离真实位置更近,最终可以得到,用仿真来改善SPS中的偏移误差是可行的。
6 结语
在定位实验中我们发现SPS的定位结果是从真实位置偏移出来的,并认为这种偏移是取决于高度,以及由卫星分布改变的偏移方向和偏移量。试图通过使用模拟的方式来预测和修改偏移误差。通过模拟仿真实验和最后的对比结果可知,最终精确的预测了偏移的方向。此外,虽然当前阶段的数据,改善了定位的精度。但是由于转变的数量比较少,并不能够真正的说明问题,所以,关于提高定位精度的问题,还要以后做进一步的研究。
[1]杨杰,张凡.高精度GPS差分定位技术比较研究[J].移动通信,2014(2):54-58.YANG Jie,ZHANG Fan.Comparison and Research of High Precision GPS Differential Positioning Technique[J].Mobile Communication,2014(2):54-58.
[2]王世进,秘金钟,谷守周,等.BDS/GPS组合相对定位方法及精度分析[J].测绘通报,2014(5):1-4.WANG Shijin,BEI Jinzhong,GU Shouzhou,et al.Relative Positioning of Combined BDS/GPS and Its Accuracy Analysis[J].Bulletin of Surveying and Mapping,2014(5):1-4.
[3]陈振,秘金钟,王权,等.BDS/GPS实时动态网络伪距差分定位[J].测绘科学,2015,40(12):81-85.CHEN Zhen,BEI Jinzhong,WANG Quan,et al.Real-time Dynamic Experimental Research on BDS/GPS Network Pseudo-range Differential Positioning[J].Science of Surveying and Mapping,2015,40(12):81-85.
[4]曲伟菁,朱文耀,宋淑丽,等.三种对流层延迟改正模型精度评估[J].天文学报,2008,49(1):113-122.QU Weijing,ZHU Wenyao,SONG Shuli,et al.The Evaluation of Precision about Hopfield,Saastamoinen and EGNOS Tropospheric Delay Correction Model[J].Acta Astronmica Sinica,2008,49(1):113-122.
[5]兰孝奇,张兵良,黄继红,等.GPS伪距差分定位技术的试验研究[J].河海大学学报(自然科学版),2004,32(3):300-303.LAN Xiaoqi,ZHANG Bingliang,HUANG Jihong,et al.Experimental Research of GPS Pseudo-range Differential Position[J].Journal of Hohai University(Natural Sciences),2004,32(3):300-303.
[6]周立.GPS广播星历误差影响诊断与预测模型研究[J].测绘科学,2005,30(4):37-38.ZHOU Li.The Study on The Model of Diagnosis&Forecast for The GPS Broadcasting Ephemeris Error[J].Science of Surveying and Mapping,2005,30(4):37-38.
[7]韩保民,杨元喜.基于GPS精密单点定位的低轨卫星几何法定轨[J].西南交通大学学报,2007,42(1):75-79.HAN Baomin,YANG Yuanxi.Kinematic Orbit Detemination of Low-Earth Orbiters Based on GPS Precise Point Positioning Technique[J].Journal of Southwest Jiaotong University,2007,42(1):75-79.
[8]陈义.精密点定位的基本原理和应用[J].同济大学学报(自然科学版),2006,34(7):919-923.CHEN Yi.Principle and Application of Precise Point Position[J].Journal of Tongji University(Natural Sciences),2006,34(7):919-923.
[9]马保科,常红芳,孙琳,等.极区电离层GPS信号闪烁特征统计分析[J].西安邮电大学学报,2015,20(3):92-96.MA Baoke,CHANG Hongfang,SUN Lin,et al.Statistical Analyses on Characteristics of GPS Signal Scintillation in High Latitude Ionosphere[J].Journal of Xi'an University Of Posts And Telecommunications,2015,20(3):92-96.
[10]刘原华,张旭东,牛新亮.高动态GPS弱信号多级相干累加捕获[J].西安邮电大学学报,2015(5):11-16.LIU Yuanhua,ZHANG Xudong,NIU Xinliang.A Multilevel Coherent Accumulation GPS Weak Signal Acquisition Method in High Dynamic Situation[J].Journal of Xi'an University of Posts and Telecommunications,2015(5):11-16.
[11]ZHANG Shufang,YUAN Ancun.Position Differential GPS System.Journal of Dalian University of Technology.2002.71-74.
[12]Huang J,Tan H S.A Low-Order DGPS-Based Vehicle Positioning System Under Urban Environment[J].IEEE/ASME Transactions on Mechatronics,2006,11(5):567-575.
