基于断裂行为的水下机器人抗压疲劳损伤测试∗
2018-05-29杨冲
杨 冲
(昆明船舶设备研究试验中心 昆明 650051)
1 引言
随着水下探测技术和人工智能技术的发展,水下机器人(Underwater Autonomous Vehicle,UAV)技术不断成熟,人们采用水下机器人进行水下目标检测、水下智能探测、水下开采作业等,有效提高了水下作业的效率的同时,降低了水下作业的风险。水下机器人作为一种人工智能体和主动探测制导控制系统,集机械、控制、信息处理以及水下避障等学科为一体,在军事领域中同样表现出广阔的应用价值。水下机器人在军事应用中,主要表现为水下航行器跟踪识别、声呐信号探测、水下蛙人以及运载等,通过自主航行、制导控制、信号处理以及计算机智能控制系统,实现水下机器人的探测、跟踪、识别和控制[1]。水下机器人由于长期工作在大深度的海水中,海水的压力较大,盐度较高,腐蚀性较强,容易导致机器人断裂,需要进行水下机器人的抗压疲劳损伤优化测试,提高水下机器人的抗拉强度,避免机械断裂,研究相关的水下机器人抗压疲劳测试方法在提高机械人强度方面具有重要意义。
传统方法中,对机器人抗压疲劳损伤测试及机械设计方法主要采用数值模拟分析方法和统计分析方法[2],根据机械强度的屈曲关系进行水下机器人的抗拉强度数值分析,实现对机器人机械剩余承载力模拟,从而指导机器人的机械设计和制造水平,具有一定的效果,但是随着机器人作业海水深度的增大,不能有效模拟机器人的疲劳损伤的数值关系,在大深度的海水工作环境下机器人容易出现断裂行为,且对水下机器人承载动力学分析的准确性不好[3]。针对上述问题,本文提出一种基于断裂行为的水下机器人抗压疲劳损伤测试方法。首先进行水下机器人抗压疲劳损伤系统的总体结构分析,构造水下机器人受力参量的估计模型,建立水下机器人机械荷载力学方程。然后采用断裂行为评估模型进行水下机器人抗压疲劳的力学估计和参量可靠性分析,建立水下机器人的机械流场应力模型,实现水下机器人抗压优化设计。最后进行了计算机仿真测试分析,展示了本文方法在提高水下机器人抗压和抗断裂行为方面的优越性。
2 抗压疲劳损伤的总体结构及受力约束参量
2.1 水下机器人抗压疲劳损伤测试的总体结构分析
本文研究水下机器人抗压疲劳损伤测试系统结构分析,需要分析水下机器人在海水下的机械屈曲关系和剩余抗拉强度的数值分析模型,在CAD/CAM平台上进行水下机器人抗压疲劳损伤系统的总体结构分析,机器人的抗压疲劳测试的CAD/CAM主模块包括了机器人的CAD造型设计、机械强度的应力生成模拟、机器人机械加工的进刀曲率控制以及后置处理等部分[4]。以机器人在海水下的屈服响应、疲劳应力、抗拉能力、剪力、抗压力和受压区应变之间的关系为约束参量,建立机器人机械设计和抗压疲劳测试的机械动态分析模型,在五轴坐标系中进行水下机器人的加工仿真和后置处理[5],根据上述分析,得到水下机器人抗压疲劳损伤测试系统的总体结构框图如图1所示。
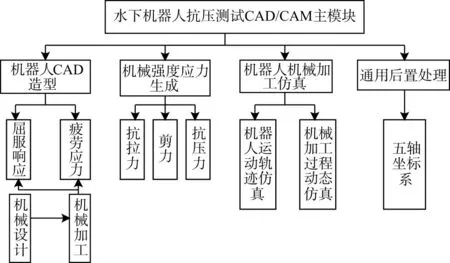
图1 水下机器人抗压疲劳测试的总体结构模型
根据图1所示的水下机器人抗压疲劳损伤测试的总体结构模型,进行水下机器人抗压疲劳测试的数值分析和参数模型构造,假设机器人的主材直径为34mm,构件的整体截面厚度11.23mm,转矩为φ60.3×6.3,设计压力 12MPa,工作环境温度为-50℃~50℃,能够经受高温高压下的海水压力冲击。采用非约束刚度弹塑性模型构造水下机器人的构件有限元分布模型,得到水下机器人在海水高压徐变和瞬态热效应作用下的疲劳测试应力关系,分析机器人的抗压力学性能与海水深度和荷载的作用关系。
2.2 水下机器人受力参量的估计模型
在上述进行了水下机器人抗压疲劳损伤测试总体结构分析和原理介绍的基础上,构造水下机器人受力参量的估计模型,建立水下机器人机械荷载力学方程,水下机器人在五轴坐标系中表现为一个连杆结构模型[6~8],各支链末端构件的弹性模量T和剩余承载力V分别为
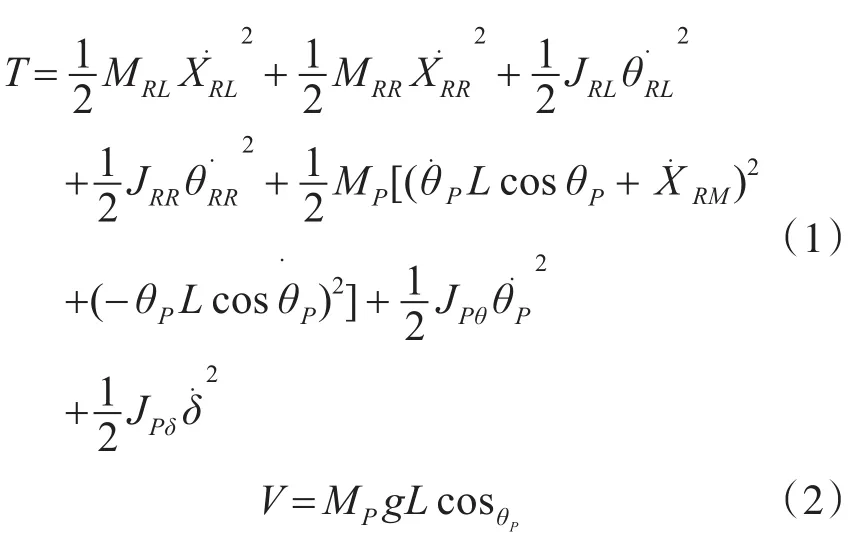
在零势能面计算水下机器人三平移并联机构的应力拟合值:

预先设定水下机器人结构强度,水下机器人抗水下压强的强度等级为C60,由此得到水下机器人机械荷载力学方程:
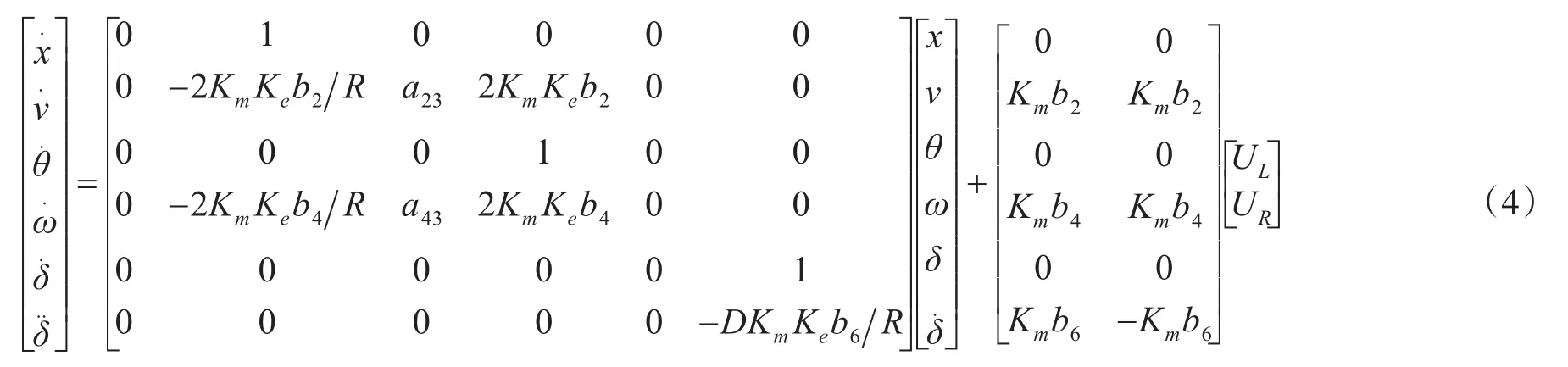
其中,每条支链上水下机器人黏滞阻尼状态参数为与状态是互不相关的,由此得到水下机器人系统的机械弹性荷载力学方程描述为
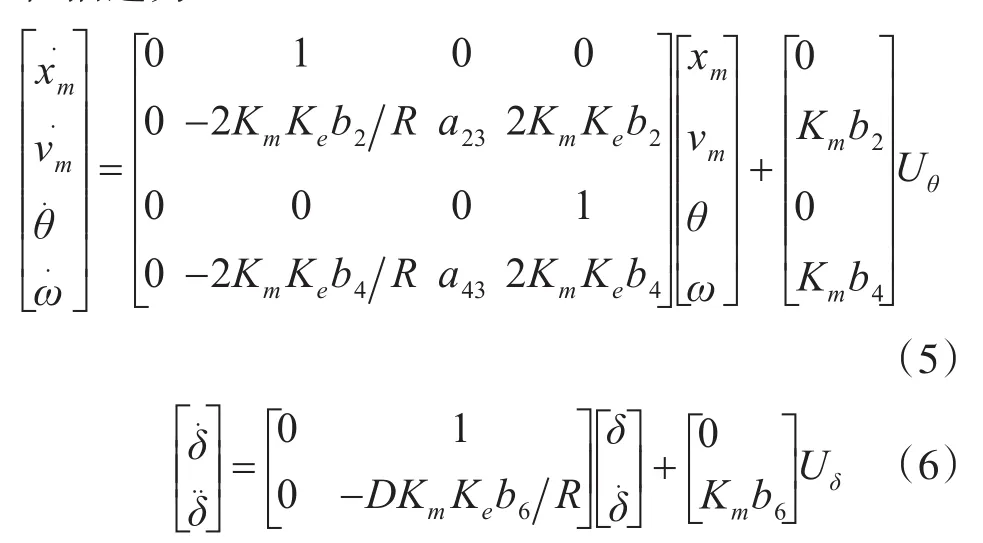
采用拟线性评估方法估计水下机器人在海水压力作用下的机械剩余抗拉强度,在此基础上进行机器人的断裂行为评估和抗压疲劳损伤测试。
3 机器人抗压疲劳损伤评估模型优化
3.1 抗压疲劳的力学估计和参量可靠性分析
在CAD/CAM平台上进行水下机器人抗压疲劳损伤系统的总体结构分析,构造水下机器人受力参量的估计模型的基础上,进行水下机器人的抗压疲劳的力学估计和参量可靠性分析[9],本文提出一种基于断裂行为的水下机器人抗压疲劳损伤测试方法。给定结构降耦构型的误差参考量fx(X,t),fθ(X,t)为不确定的有界函数,在并联机构的拓扑结构中,机器人抗疲劳断裂的安全允量条件下,其解耦构型的估计函数分别为有如下关系:
根据各支链在动/静平台之间的载荷比值推荐值,引入两个初始裂纹长度,随着试样的变形,在海水中机器人抗压疲劳损伤的演化规律分量分别描述为
取 sinθp=θp,cosθp=1,每次改变尺寸参数时,以载荷分离最大和断裂可靠性评价最优为目标优化参考模型,借助有限元模拟计算2D面-面接触对的刚性强度,为
式 中 ,分别为抗压疲劳的力学估计参量、加载线位移和接触刚度,对上述多目标优化模型进行约束进化求解。
3.2 机械流场应力模型和抗压疲劳损伤测试优化
在机器人断裂行为约束下,根据材料应变硬化指数构建机械流场应力模型[10],得到抗压疲劳损伤的约束进化方程描述为
式中,z1,z2是断裂韧度约束参数,y为海水深度,z3是规则化载荷变量,β1,β2,β3,δ,b是可调参数。在给出了载荷分离参数的条件下[11],得到裂纹终止点的误差修正方程式表示为
式中,是规则化处理的数据点;kp,kd是比例系数和微分系数。通过断裂行为评估,得到水下机器人抗压疲劳测试的动态评估方程:
式中,yi是实时裂纹长度是超越行程的“动态耦合的参数”,bij是加载线位移,考虑断裂韧度存在热误差影响[12],通过曲率修正得到机器人抗压疲劳评估的应力拟合解析量算关系:
建立动量守恒方程为

式中:

由于卸载柔度的变化与裂纹长度具有定常性,故:
忽略卸载柔度的扰动影响以及水下机器人自身的重力作用,有

由此得到水下机器人抗压疲劳测试的弹性部分和塑性部分的湍流方程为k-ε方程,表示为
其中:

综上分析,在大深度的液态介质环境下建立水下机器人的机械流场应力模型,实现水下机器人抗压优化设计。
4 仿真实验与性能测试分析
为了测试本文方法在实现水下机器人抗压疲劳测试和机械强度优化设计中的应用性能,进行仿真实验实验建立在CAD/CAM数控仿真软件基础上,采用Matlab R2010b仿真软件进行数值实验分析,机器人的主体加工材料为20CrMnTi,规格φ60.5×6.8,海水湍流参数取值分别为:C1ε=1.44 ,C2ε=1.92,Cμ=0.09,σk=1.0,σε=1.3。切齿深度φ取值1.0mm,结合塑性因子Ke=0.5732Vs/rad,卸载柔度Jp=0.804(1±0.5)kg·m2,材料应变硬化指数为1.25,根据上述仿真环境和参量设定,进行水下机器人的抗压疲劳测试,得到水下机器人的抗压疲劳测试的等高线图如图2所示,机器人断裂行为的有限元分布云图如图3所示。
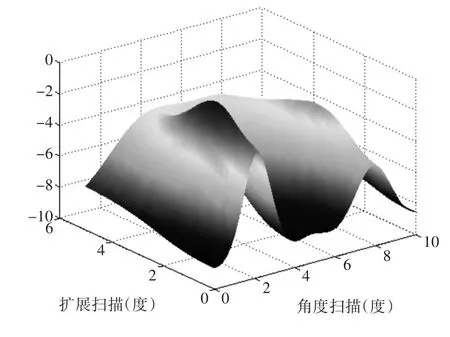
图2 水下机器人的抗压疲劳测试的等高线图
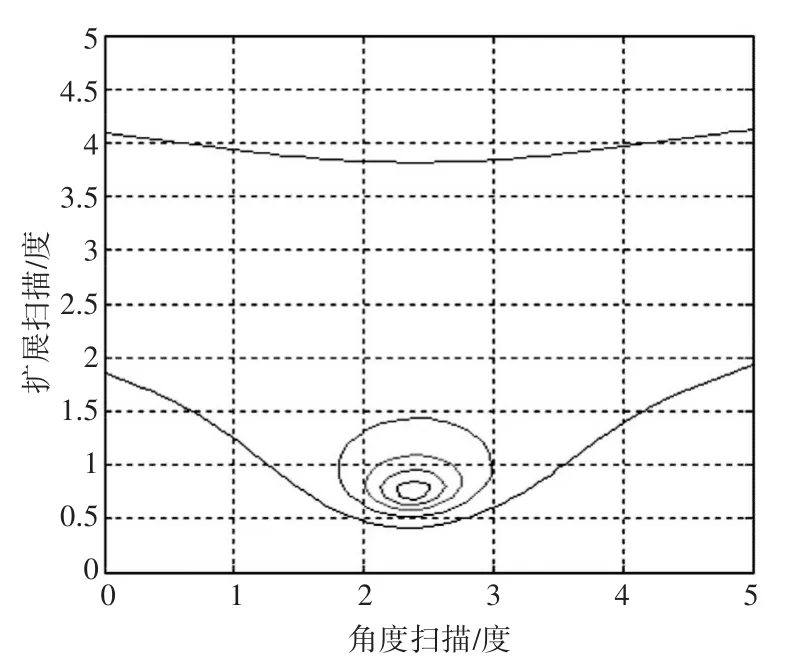
图3 水下机器人断裂行为的有限元分布云图
分析图2和图3结果得知,采用本文方法进行机器人抗压疲劳测试和断裂行为评估,水下机器人断裂行为的有限元分布较为平滑,说明该设计方法能有效提高水下机器人强度,克服疲劳损伤,为了对比不同方法的性能,采用本文方法和传统的构件耦合方法进行水下机器人的抗压设计,得到疲劳损伤测试误差对比如图4所示。
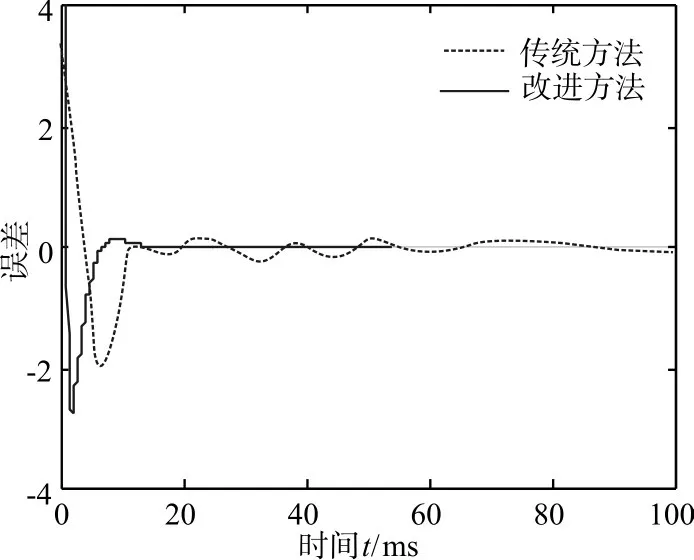
图4 误差性能测试
分析图4结果得知,本文方法进行水下机器人机械性能测试的误差较小,采用本文设计方法能增大水下机器人工作海深,抗疲劳损伤性能较好。
5 结语
进行水下机器人的抗压疲劳损伤优化测试,提高水下机器人的抗拉强度,避免机械断裂,本文提出一种基于断裂行为的水下机器人抗压疲劳损伤测试方法。构造水下机器人受力参量的估计模型,建立水下机器人机械荷载力学方程,采用断裂行为评估模型进行水下机器人抗压疲劳的力学估计和参量可靠性分析,在大深度的液态介质环境下建立水下机器人的机械流场应力模型,实现水下机器人抗压优化设计。研究表明,采用本文模型进行水下机器人的机械结构应力场分析和抗压疲劳损伤测试,能有效提高水下机器人强度,增大水下机器人工作海深,抗疲劳损伤性能较好,在水下机器人的机械性能改进设计中具有很好的应用价值。
参考文献
[1]邹胜宇,刘振,高海波,等.基于干扰力时间积分的悬吊漂浮物随动控制方法[J].机器人,2015,37(1):1-8,16.
[2]陆兴华,陈锐俊,池坤丹.引入人体红外释热探测的救援机器人感知系统[J]. 舰船电子工程,2016,36(3):151-155.
[3]沈惠平,李菊,王振,孟庆梅,戴丽芳.基于结构降耦和运动解耦的并联机构拓扑结构优化及其性能改善[J].机械工程学报,2017,53(19):176-186.
[4]Liu Junyan,Liu Yang,Wang Fei,et al.Study on proba⁃bility of detection(POD)determination using lock-in ther⁃mography for nondestructive inspection(NDI) of CFRP composite materials[J].Infrared Physics&Technology,2015(71):448-456.
[5]Kumar A,Pooja R,and Singh G K.Design and perfor⁃mance of closed form method for cosine modulated filter bank using different windows functions[J].International Journal of Speech Technology,2014,17(4):427-441.
[6]安慰宁,张福民,吴翰钟,曲兴华.一种基于飞秒光频梳频域干涉的绝对测距方法[J].仪器仪表学报,2014,35(11):2458-2465.
[7]苏辉,李志平,段延敏,等.基于掺镁周期极化铌酸锂晶体的内腔单共振连续可调谐光参量振荡器[J].光学精密工程,2013,21(6):1404-1409.
[8]王霞,张明阳,陈振跃,等.主动偏振成像的系统结构概述[J]. 红外与激光工程,2013,42(8):2244-2246.
[9]任朝晖谢吉祥周世华闻邦椿.斜齿轮-转子-轴承弯扭轴耦合振动特性分析[J].机械工程学报,2015,51(15):75-89.
[10]李俊华,刘明哲,唐跃峰,等.火灾后型钢混凝土梁受力性能试验研究[J].土木工程学报,2011,44(4):84-90.
[11]闫清东,穆洪斌,魏巍,等.双循环圆液力缓速器叶形参数优化设计[J].兵工学报,2015,36(3):385-390.
[12]马雪.基于FPGA嵌入式设计的水声信号采集系统[J].舰船电子工程,2017,37(3):135-139.
[13]陆兴华,詹世尉,余文权.最陡下滑轨迹中无人机的航向校正控制算法[J].计算机与数字工程,2016,44(12):2370-2374,2425.
