均值偏移算法在扩展目标跟踪技术上分析∗
2018-05-29李湘文尹福成
李湘文 周 玲 尹福成
(1.成都理工大学工程技术学院 乐山 614000)(2.内江师范学院 内江 641000)
1 引言
随着计算机技术的不断发展,计算能力的大幅提高,计算机视觉技术成为了计算机领域最热门的重要课题之一[1~7]。计算机视觉的目的是实现计算机对人类的模拟,实现计算机对景物环境的感知、理解和解释[6~13]。运动目标跟踪技术是运动目标跟踪领域的一个重要课题,它是一项融合图像处理[14~16]、模式识别[15~18]、人工智能[18~21]、自动控制等多种不同领域的先进技术。形成了一种能从图像信号中实时提取目标位置、自动跟踪目标的技术[22~25]。其任务可以概述为:对运动目标最终形成的运动轨迹进行确认之后获得目标的个数以及每个目标的状态,包括位置、速度、加速度等运动参数,并进一步获知目标的特征参数,关键在于完整地分割目标、合理地提取特征和准确地识别目标,同时要考虑算法实现时间,保证实时性[26~30]。
然而扩展目标跟踪技术,又是运动目标跟踪技术中一个非常重要、跟踪非常困难的重要课题之一[1~11]。由于它所具有的复杂背景干扰性、被遮挡性、目标尺度变化明显等一系列特性,现有的算法几乎都无法做到较好地跟踪目标;从而目标在跟踪过程中丢失的情况特别常见。找到一种普适性的扩展目标跟踪算法是扩展目标跟踪领域一个亟需解决的问题[1~7]。均值偏移算法以其独有的抗尺度变化、旋转变化、人工干预系数少而逐步成为扩展目标跟踪领域一个较好的方法。
2 均值偏移算法
均 值 偏 移(mean-shift)[1]是 Fukunaga 和Hostetler提出的一种计算最优解的实用的算法,具有计算量小和搜索快速的特点,Dorin Comaniciu等将其有效地运用到目标分割[2]和目标跟踪中[3]。
以二值图像为例的均值偏移算法的迭代过程如下:
目标函数为图像中“1”值点的密度,其估计式为
当为收敛的域值)时,即当两次求得的窗口中心距离足够小时,迭代停止。如图1所示,均值偏移过程实质上是使目标函数迭代收敛到最大的过程(Initial→Final)。
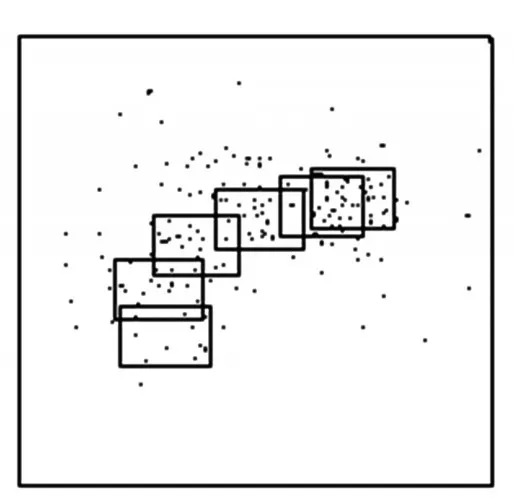
图1 均值偏移迭代过程示意图
3 扩展目标跟踪技术
3.1 目标模型
目标直方图模式是基于检测区域内包含目标的各个成像灰度级所对应的概率密度,灰度概率密度的求取采用非参数估计技术。假设目标跟踪点为y,检测区域是以y为中心、窗宽为h的矩形,区域内像素的位置以表示,像素位置的特征如灰度、纹理、边缘或者小波滤波响应等以b()xi表示,b()xi可以是一种特征形成的标量,也可以是几种特征形成的矢量。本文中仅考虑利用灰度特征,并将其值量化为m值,即函数为xi像素的灰度索引映射。由于目标可能受到背景和遮挡的影响,周边像素的可靠性较低,因而离中心越远的像素分配的权值应该越小,灰度概率密度是像素位置的函数:

其中C1为归一化常数,可由条件求出;为像素位置权值分配函数,其定义如下:
3.2 相似性度量
不失一般性,将目标中心标记为0,候选目标中心为y,由式定义的目标模式可确定目标与候选目标的直方图模式分别为
目标:
候选目标:
相似函数定义了目标和候选目标相似程度的一种度量,为了调和不同目标之间的区别,需要定义一种距离测度,我们定义两个离散分布之间的距离为
其中

是Bhattacharyya系数的样本估计值。其几何意义是m为单位矢量的夹角的余弦值。
4 均值偏移在扩展目标跟踪的应用
均值偏移以其独有的特性在图像跟踪领域展现着重要的作用,下面分别对彩色和灰度扩展目标进行一些测试。找出其在跟踪领域的优势和不足。
4.1 彩色目标跟踪实例
彩色目标跟踪技术是现代视屏监控技术中比较常见的一种技术。在超市视屏监控,道路监控,警务系统里面应用比较常见。因此彩色目标跟踪技术也是一项比较贴近生活实际的技术。

图2 第1帧

图3 第8帧

图4 第25帧

图5 第50帧
经过试验得到50帧图像总计用时150ms,单帧处理时间3ms。50帧偏移量在0~4个像素之间。由此说明,彩色目标由于具有丰富的颜色特征,从而在建立图像的颜色直方图时提供了大量的信息。因此在图像跟踪过程中,图像呈现的结果是跟踪精确,速度快。能够达到实时跟踪的需求。
4.2 灰度目标的跟踪实例

图6 第1帧

图7 第8帧

图8 第25帧

图9 第50帧
灰度成像跟踪是现代军事领域的一个重要课题之一,以红外目标跟踪技术最为明显。由于它可以抗光线明暗的干扰因而成为夜视跟踪领域中一个重要的技术。
经过试验得到50帧图像总计用时145ms,单帧处理时间约3ms。但是50帧偏移量大部分在4~10个像素,当物体存在虚影时,偏移量甚至超过了窗宽,目标直接丢失。由此说明,灰度目标由于颜色信息不够丰富,加上背景干扰性太强,因此单纯的均值偏移算法对灰度目标跟踪是比较困难的。特别是背景干扰性太强的情况下。
为此,要想让均值偏移算法在灰度目标跟踪中也得到彩色目标如此的效果,需要利用一些方法来提高灰度目标的信息量。以此提高目标跟踪的精度。
5 结语
均值偏移是目标跟踪领域一个极其重要的算法,由于它独有的半自动跟踪特性。在彩色目标跟踪领域已经得到了很好的应用。但由于灰度成像图像色彩信息不够的事实,目标与背景的成像特征差异小,常规直方图模式易陷于局部相似性,导致跟踪点漂移或抖动的问题。此单纯的均值偏移算法跟踪灰度图像是不可取的。在跟踪灰度目标利用均值偏移算法,必须还要提取一些图像的信息量,比如图像的灰度梯度,特征点等来弥补色彩信息的不足。
参考文献
[1]K.Fukunaga,L.D.Hostetler,The Estimation of the Gradi⁃ent of a Density Function with Applications in Pattern Rec⁃ognition[J].IEEE Trans.Information Theory,1975,21(5):32-40.
[2]Dorin Comaniciu,Peter Meer,Mean Shift:a Robust Ap⁃proach toward Feature Space Analysis[J].IEEE Trans.Pattern Anal.Mach.Intell.,2002,24(5):603-619.
[3]Dorin Comaniciu,Visvanathan Ramesh,Peter Meer,Ker⁃nel-based Object Tracking[J].IEEE Trans.Pattern Anal.Mach.Intell.,2003,24(5):564-577.
[4]T.Kailath.The Divergence and Bhattacharyya Distance Measures in Signal Selection[J].IEEE Trans.Comm.Technology,1999,15(2):253-259.
[5]Richard O.Duda,Peter E.Hart,David G.Stork,Pattern Classification,Second Edition[M].China Machine Press,2003:132-140.
[6]Lowe D.G.,Object recognition from local scale-invariantfeatures[C]//The Proceedings of the 7th IEEE Internation⁃al Conference on Computer Vision.Corfu,Greece.Sept.1999,2:1150-1157.
[7]Lowe D.G.,Distinctive image features from scale-invari⁃ant keypoints[J].International Journal Computer Vision,2004,60(2):91-110.
[8]Ranade S.and Rosenfeld A.,Point pattern matching by re⁃laxation[J].Pattern Recognition,1980,12(4):269-275.
[9]Stockman G.,Kopstein S.,Benett S.,Matching images to models for registration and object detection via clustering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1982,4(3):229-241.
[10]Goshtasby A.and Stockman G.,Point pattern matching using convex hull edges[J].IEEE Transactions on Sys⁃tems,Man,and Cybernetics,1985,15(5):631-637.
[11]Huttenlocher D.P.,Klanderman G.A.,Rucklidge W.A.,Comparing images using the hausdorff distance[J].IEEE Transactions on Pattern Analysis and Machine Intelli⁃gence,1993,15(9):850-863.
[12]Burt P.J.,The pyramid as a structure for efficient compu⁃tation[C]//Multiresolution Image Processing and Analy⁃sis.Springer-Verlag,Berlin,1984:6-35.
[13]Adelson E.H.,Depth-of-Focus Imaging Process Method[D].United States Patent 4,661,986.1987.
[14]Ajjimarangsee P.and Huntsberger T.L.,Neural network model for fusion of visible and infrared sensor outputs[J].SPIE,1988,1003:153-160.
[15]Nandhakumar N.and Aggarwal J.K.,Integrated analysis of thermal and visual images for scene interpretation[J].IEEE Transactions on Pattern Analysis and Machine In⁃telligence,1988,10(4):469-481.
[16]Toet A.,Image fusion by a ratio of low-pass pyramid[J].Pattern Recognition Letters,1989,9(4):245-253.
[17]Toet A.,Ruyven J.J.V.,Valeton J.M.,Merging thermal and visual images by a contrast pyramid[J].Optical Engi⁃neering,1989,28(7):789-792.
[18]Rogers S.K.,Tong C.W.,Kabrisky M.,et al,Multisen⁃sor fusion of ladar and passive infrared imagery for target segmentation[J].Optical Engineering,1989,28(8):881-886.
[19]Abidi A.and Gonzalez R.C.,Data Fusion in Robotics and Machine Intelligence[M].New York:Academic Press,1992.
[20]Dasarathy B.V.,Fusion strategies for enhancing decision reliability in multi-sensor environments[J].Optical En⁃gineering,1996,35(3):603-616.
[21]Li H.,Manjunath B.S.,Mitra S.K.,Multi-sensor image fusion using the wavelet transform[C]//IEEE Internation⁃al Conference on Image Processing,1994,1:51-55.
[22]Chipman L.J.,Orr Y.M.,Graham L.N.,Wavelets and image fusion[C]//Proceedings of the International Con⁃ference on Image Processing.Washington,USA,1995:248-251.
[23]Koren I.,Laine A.,Taylor F.,Image fusion using steer⁃able dyadic wavelet transform[C]//Proceedings of the In⁃ternational Conference on Image Processing.Washing⁃ton,DC,USA,1995:232-235.
[24]Waxman A.M.,Fay D.A.,Gove A.N.,et al,Color night vision:fusion of intensified visible and thermal IR imag⁃ery[J].SPIE.1995,2463:58-68.
[25]Waxman A.M.,Gove A.N.,Fay D.A.,et al,Color night vision:opponent processing in the fusion of visible and IR imagery[J].Neural Networks.1997,10(1):1-6.
[26]Toet A.and Walraven J.,New false color mapping for im⁃age fusion[J].Opt.Eng.1996,35(3):650-658.
[27]Lim E.T.,Shue L.,Ronda V.,Multi-mode fusion algo⁃rithm for robust dim point-like target detection[J].SPIE,2003,5082:94-102.
[28]Borghys D.,Verlinde P.,Perneel C.,etc.Multi-level da⁃ta fusion for the detectionof targets using multi-spectral image sequences[J].Optical Engineering.1998,37(2):477-484.
[29]Yang J.,Lu Z.G.,Guo Y.K.,Target recognition and tracking based on data fusion of Radar/Infrared image sensors[EB/OL].www.paper.edu.cn.
[30]Xue Z.,Blum R.S.,Li Y.,Fusion of visual and IR imag⁃es for cancealed weapon detection[C]//Proceedings of the Fifth International Conference of Information Fusion.Annapolis,2002,2:1198-1205.
