基于红外图像序列的排球运动关键技术特征提取方法*
2018-05-28邹业兵朱彦陈苏利强
邹业兵, 朱彦陈, 王 欣, 苏利强
(1.江西中医药大学 体育教学部,江西 南昌 330004;2.江西中医药大学 计算机学院,江西 南昌 330004;3.南昌大学 体育与教育学院,江西 南昌 330031)
在高水平的训练中,对运动员的运动关键技术特征提取是十分必要的.通过对运动技术动作进行特征提取,能够获取高质量的技术动作数据[1-4].而高质量的技术动作数据在提升运动训练质量乃至获取更高水平运动成绩方面都是十分重要的.近年来,一些研究人员对该领域进行了深入研究.文献[5]提出了基于三维视觉系统图像特征和三维信息的运动估计方法,该方法基于三维视觉系统实时获取场景二维图像信息和按二维图像像素对应的空间三维信息.文献[6]提出了一种基于稀疏模型实现光流和遮挡的计算检测,发展一个鲁棒稀疏模型和一个稀疏模型用于运动目标的跟踪,并基于稀疏模型实现动作识别.文献[7]对常见的运动目标检测方法原理进行了介绍,分析总结了现有的几种经典运动目标检测算法的优劣.
随着数字图像处理技术的逐步成熟,红外图像序列逐渐进入研究者的视野[8-9].基于此,本文提出了一种基于光学图像采集器的网球运动员姿势识别算法.
1 提出姿势识别方法
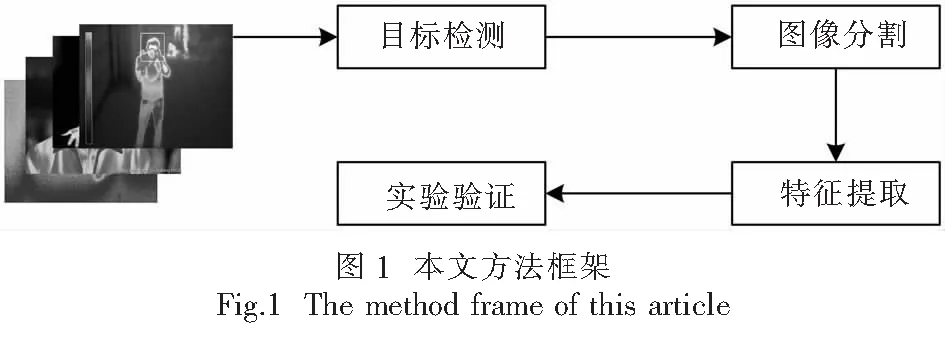
提出了一种基于红外图像序列的排球运动关键技术特征提取方法.首先,获取红外图像序列的排球运动图像,并对红外图像序列中的运动目标进行检测和提取.进一步用图像分割方法进行边缘分割.然后,基于视点跟踪切换方法进行阈值分析,实现对运动目标的准确跟踪和提取.所提出的方法总体结构如图1所示.
1.1 目标检测与图像分割
红外图像序列的帧差图像反映了运动目标引起的变化,可以据此确定运动目标所在区域.位移帧差Δk(x,y)可以表示为:
Δk(x,y)=|Ik(x,y)-Ik-1(x,y)|,
式中,Ik(x,y)是第k帧的亮度分布.已有的研究结果表明,由噪声引起的背景方差变化,一般小于由运动目标引起的背景方差变化.记H1、H0为动目标和噪声引起的变化,H0情况下,令σ表示背景图像的均值,则噪声模型分布函数为:
式中,P为H0假设下的样本概率,x是帧差图中样本点灰度值,μb为图像噪声的标准差.然后即可通过阈值T来判定帧差图像中像素的归属,对帧差图像的各像素点一次进行扫描,计算质心像素点所在的窗口偏差:
阈值T将样本空间分成两部分.
1.2 运动特征提取
通过上述的时域分割结果可以标记出运动目标的大概位置.
在上述进行的目标检测与图像分割的基础上,基于视点跟踪切换方法进行阈值分析,实现对运动目标的准确跟踪和提取.首先,通过视点跟踪切换,沿梯度方向搜索动作平面上的特征信息.采用小波分解方法[10-11]进行相位加权,得到角度信息:
将图像边缘幅度信息分解为沿梯度方向的两个分量,采用高阶平移泰勒展开式方法,进行单帧视频跟踪,即
此时,得到偏移量的幅度和相位等关键技术指标信息.通过多层网格分解,在运动特征迭代式中代入,从而得到:
用矩阵X表示目标特性的曲线轨迹,并提取二阶特征向量.假设判别条件成立,可得到二阶矩阵特征向量如下:
式中,(x,y)表示运动目标特征的数字图像的旋度补偿,其形式为:

通过上述分析推理,得到运动目标特征振幅分量和频率分量如下:
2 实验
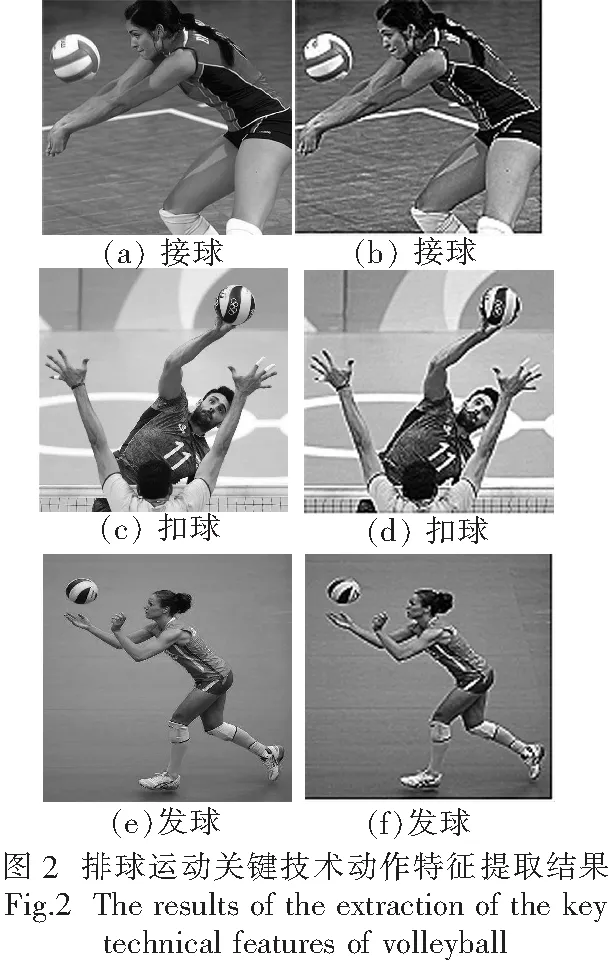
为了测试本文方法特征提取的性能,选取了接球、扣球和发球3个排球运动关键技术动作进行实验验证,如图2(a)、(c)、(e)所示.在运动员进行接球、扣球以及发球动作的瞬间,捕捉细节特征,并通过几种技术姿势的前景特征提取,实现运动感知数据的输出.基于本文的方法进行动作特征提取,得到的提取结果如图2(b)、(d)、(f)所示.
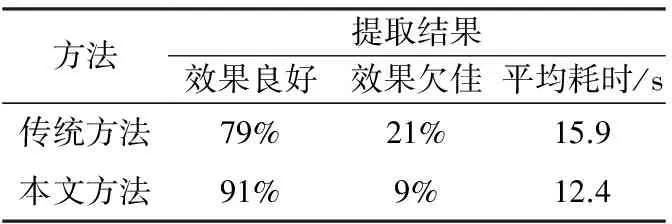
表1 传统方法与本文方法提取精度对比
本文方法获取基于红外图像序列的排球运动图像,并对红外图像序列中的运动目标进行检测和提取,进一步基于视点跟踪切换方法进行阈值分析,实现对运动目标的准确跟踪和提取,保证了动作特征提取的精确度.对100 幅排球运动图像进行基于传统方法与本文方法的特征提取,最终结果如表1所示.
实验表明,本文提出的方法准确性和效率均高于传统方法.
参考文献
[1] 秦磊, 胡琼, 黄庆明,等. 基于特征点轨迹的动作识别[J]. 计算机学报, 2014, 37(6): 1281-1288.
[2] 桑月标, 马庆功. 网球视频中基于背景模型的目标跟踪方法[J]. 湘潭大学自然科学学报, 2017, 39(3): 111-114.
[3] KANEKO H, MURAKAMI M, NISHIZAWA K. Prevalence and clinical features of sports-related lumbosacral stress injuries in the young[J]. Archives of Orthopaedic & Trauma Surgery, 2017, 137(5):685.
[4] 吕福起, 李霄民. 利用MLT和SRS的混合图像融合与去噪算法[J]. 湘潭大学自然科学学报, 2018, 40(1): 111-114.
[5] FAN Y C, CHEN Y C, LU C C, et al. Optimal displacement control and image warping architecture for 3D vision system[C]// IEEE International Symposium on System Integration. IEEE, 2014: 138-142.
[6] 陈鹏光. 基于稀疏模型的运动跟踪识别算法[D].广州:华南理工大学, 2016.
[7] 余路. 特征提取在运动目标检测中的应用分析[D]. 武汉:中南民族大学, 2013.
[8] LIANG L, GU G, QIAN W, et al. Infrared image sequence mosaic based on feature points and Poisson fusion [J]. Infrared & Laser Engineering, 2013, 42(9): 2584-2588.
[9] JIAN B L, CHEN C L, CHU W L, et al. The facial expression of schizophrenic patients applied with infrared thermal facial image sequence [J]. Bmc Psychiatry, 2017, 17(1): 223-229.
[10] 赵伟. 基于DWT和随机森林的运动自动分类方法[J]. 湘潭大学自然科学学报, 2018, 40(1): 107-110.
[11] 马敏, 张彩霞, 陆成超,等. 基于小波变换的ECT图像处理[J]. 中南大学学报(自然科学版), 2016, 47(6): 1947-1952.
