有色示踪剂模拟槽实验图像分析法
2018-05-26赵勇胜张佳文肖乐乐
赵勇胜,陈 震,张佳文,肖乐乐,陈 瑾
1.吉林大学环境与资源学院,长春 130021 2.吉林大学通信工程学院,长春 130022
0 引言
实验室尺度的模拟槽实验是探究污染物在地下环境中迁移转化过程的有效手段之一。为掌握污染物的运移规律,需定时取样分析。传统取水样的方式会对体系内的流场造成干扰,引起污染物再分布,导致实验结果与实际存在差距;且限于取样点位置和数量的限制,对模拟槽内污染物的分布不能进行准确的描述,模拟结果具有较低的空间分辨率[1]。有色示踪剂法采用有色示踪剂或将污染物溶于示踪剂进行实验,利用CCD(电荷耦合器件)相机、数码相机等摄影设备进行图像采集,利用图像中赋存的色彩信息进行结果分析。该方法具有无干扰的特点,在实验室尺度的溶质运移模拟实验中有着广泛的应用[2-5]。
谈叶飞等[6]验证了高锰酸钾染色后标准砂层的数字图像RGB(红、绿、蓝)值与高锰酸钾溶液质量浓度之间的关系,并采用高斯模板技术对图像进行降噪处理。宋小源等[7]选取HSB(色度、饱和度、亮度)模式中的色度值(H)对食用亮蓝的质量浓度进行拟合开展溶质运移的砂箱模拟实验。Yang等[8]以亮蓝和食用胭脂红作为示踪剂研究溶质在黏土中的迁移过程。Tammy P. Taylor等[9]用脂溶性染料油红O染色PCE(四氯乙烯),观察其在透镜体存在情况下的运移过程。Fabio Tatti等[10-11]以荧光素钠为显色剂在紫外光的照射下直观地展现了低渗透区域内的扩散和反向扩散现象。
但现有研究多集中于以有色示踪剂定性地刻画污染羽的运移过程,缺乏对污染物的定量描述,无法实现对污染物存贮和释放的有效计算,特别在非均质地层中;且为了增强颜色对比度,实验中示踪剂的浓度设置较高,对于体现污染羽运移边缘的低浓度区域未能实现有效捕捉。基于此,本文利用光反射法,选取低质量浓度的食用亮蓝为有色示踪剂,在传统取样方法所得数据的对比下,考察图像分析法的信息提取精度,以探究图像分析法在污染羽刻画方面的准确度,并利用Matlab计算模拟槽内有色示踪剂贮存质量的方法。
1 图像分析法原理
图像分析法是对图像信息进行数字化,利用数字化信息与污染物浓度之间特定的函数关系进行分析的方法。图像数字信息的有效提取是方法开展的关键,目前多运用不同色彩模式下的色彩通道进行提取。常用的色彩模式有RGB、HSB和CMYK(青色、品红色、黄色、黑色)[12]。综合前人研究,本文选择最为常用的RGB模式。
RGB模式也叫三原色光模式,包含R(红色)、G(绿色)、B(蓝色)3个单色通道和一个RGB复合通道。在该模式下,R、G、B的大小代表亮度,各有256个级别,以数字0~255表示[13]。3种通道的不同亮度组合共可生成1 678万种色彩,具有极高的色彩丰富度。
在示踪实验中,当利用Photoshop、ImageJ等工具提取出色彩通道信息后,可利用色彩信息与示踪剂浓度的对应关系,对模拟槽内的示踪剂浓度分布进行更为全面的分析[14]。该方法可极大地提高监测时间的即时性和监测空间的高密度性,其中时间分辨率可达1 s,空间分辨率可达1 mm以下[15]。
2 实验装置与设计
2.1 实验装置
实验装置由模拟槽、照明系统和成像系统3部分组成。模拟槽的总尺寸为58 cm×30 cm×2 cm,两侧各包括4 cm长的布水隔室(图 1)。模拟槽正面采用无反光玻璃,以降低反射光线对相机成像的影响。石英砂装填高度为26 cm,粒径分别为10~20目(即0.850~2.000 mm)、20~40目(0.425~0.850 mm)。灯箱对称放置在模拟槽的两侧。采用照度计监测模拟槽区域内照度,保证模拟槽区域内光照均一,约为500 lx。为保证光强度的稳定性,灯箱与稳压器连接。图像的采集选用佳能EOS70D单反相机,固定于距模拟槽1.3 m的正前方。
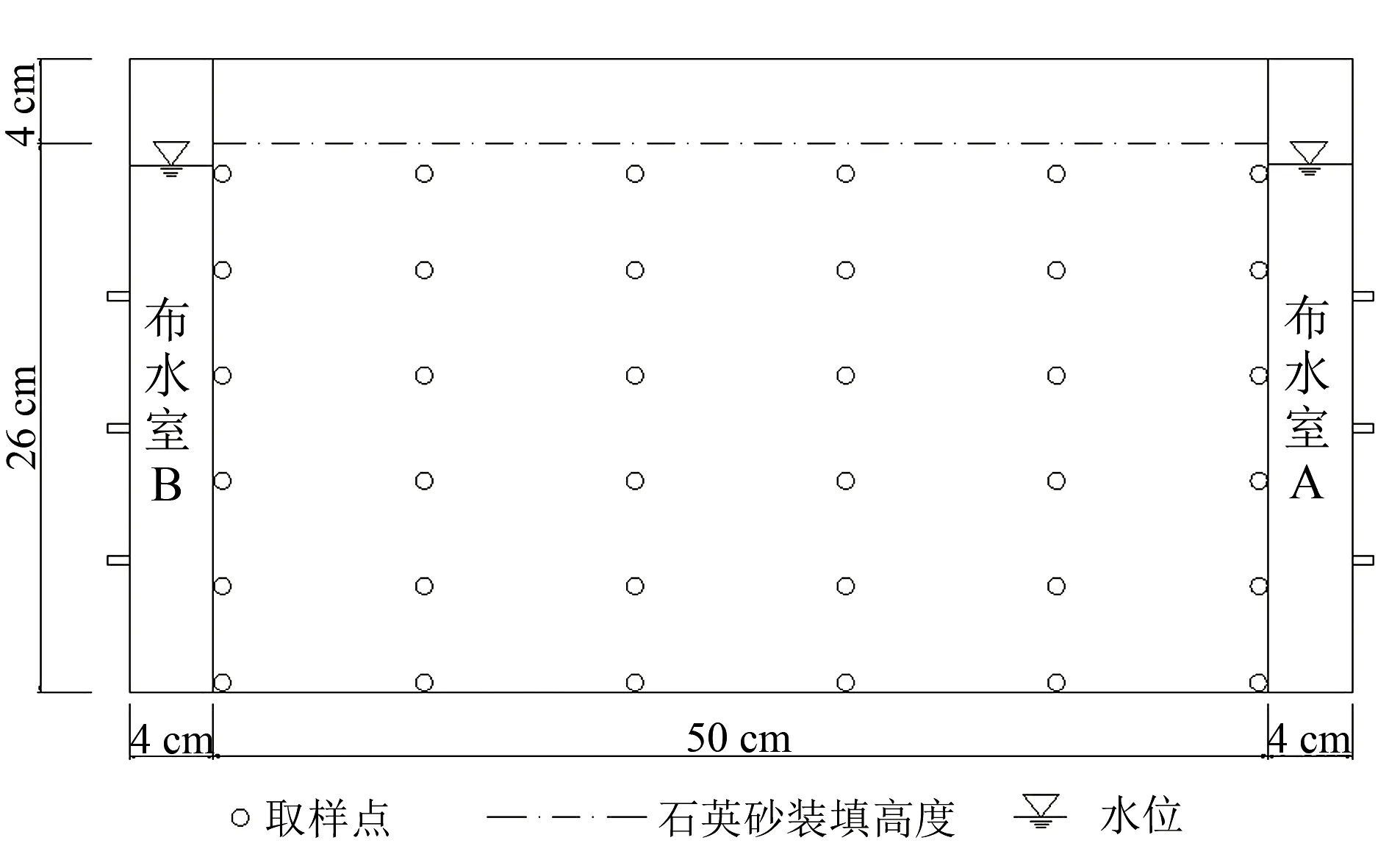
图1 模拟槽示意图Fig.1 Schematic diagram of experimental sand box
2.2 实验设计
2.2.1 标准曲线的绘制
采用分光光度法对食用亮蓝溶液进行检测,设置食用亮蓝溶液质量浓度梯度为0.00,0.01,0.10,1.00,5.00,10.00,20.00,30.00 mg/L。图像信息标准曲线在正面为无反光玻璃的小盒内进行检测,小盒尺寸为5 cm×5 cm×2 cm。将相同质量浓度梯度的食用亮蓝溶液与石英砂混合,装填入小盒内,在相同光照条件下进行拍照。
2.2.2 实验步骤
实验在暗室中进行,灯箱作为唯一光源。实验分为3组,装填介质分别为10~20目、20~40目和非均质情况的石英砂。非均质情况下,石英砂自模拟槽底部向上依次为:0~8 cm高度装填10~20 目、8 ~17 cm高度装填20~40 目、17~26 cm高度装填10~20 目。模拟槽装填石英砂并饱水后,自右侧以3 mL/min的速度注入30 mg/L的食用亮蓝溶液,每隔1 h拍照取样,并监测两侧隔水室和出水质量浓度,记录出水体积。当污染羽边缘迁移至模拟槽左边时停止注水,自上而下定点取样,以备用于利用Sufer绘制等值线图。
2.2.3 图像信息的获取
图像采集利用佳能EOS70D,快门1/60 s、光圈5.6、感光度320,手动对焦。图像获取后,利用Photoshop中的“吸管工具”对图像中的RGB等色彩信息进行单点提取,利用自行编制的Matlab程序提取图片内的各点图像信息,并进行质量计算。
3 结果分析
3.1 图像信息与亮蓝质量浓度的关系的确定
3.1.1 质量浓度信息采集精度的确定
质量浓度信息采集精度对精确描绘有色示踪剂的运移有着重要的作用。较高的质量浓度精度可对污染羽边缘区域的低质量浓度污染区有着更为精细的刻画。通过前人[14]研究可知,在RGB色彩模式下,红色通道的R值与食用亮蓝所呈现的蓝色具有最高的响应关系,故选择R值作为图像信息提取的目标值,即图像分析法的信息采集精度由R值确定。因取样法所获得样品需通过分光光度法进行检测,故取样法的信息采集精度由分光光度法对食用亮蓝溶液检测的吸光度决定。实验中将食用亮蓝的质量浓度由既往研究者所设置的数百至数千mg/L降为30 mg/L,将取样法和图像分析法测得的相同标线质量浓度下的数值作比,探究两种方法的最小信息采集精度。
由表1可知:取样法对食用亮蓝的最低检测质量浓度为0.10 mg/L;当食用亮蓝的质量浓度小于等于0.01 mg/L时,所测得的吸光度与参比溶液(食用亮蓝质量浓度为0.00 mg/L)相同,均为0.000 0。而在装填介质分别为10~20目和20~40目石英砂的情况下,当食用亮度质量浓度为0.01 mg/L时,图像分析法获得的R值均与参比溶液存在差值;但考虑到其差值很小,分别为0.334和0.666,综合取样分析等因素,故未进行亮蓝质量浓度为0.001 mg/L的实验。最终将图像分析法的精度确定为0.01 mg/L,与取样法相比,提高了一个数量级。
表1取样法和图像分析法精度对比表
Table1Comparisionofaccuracybetweensampingandimageprocessingmethod
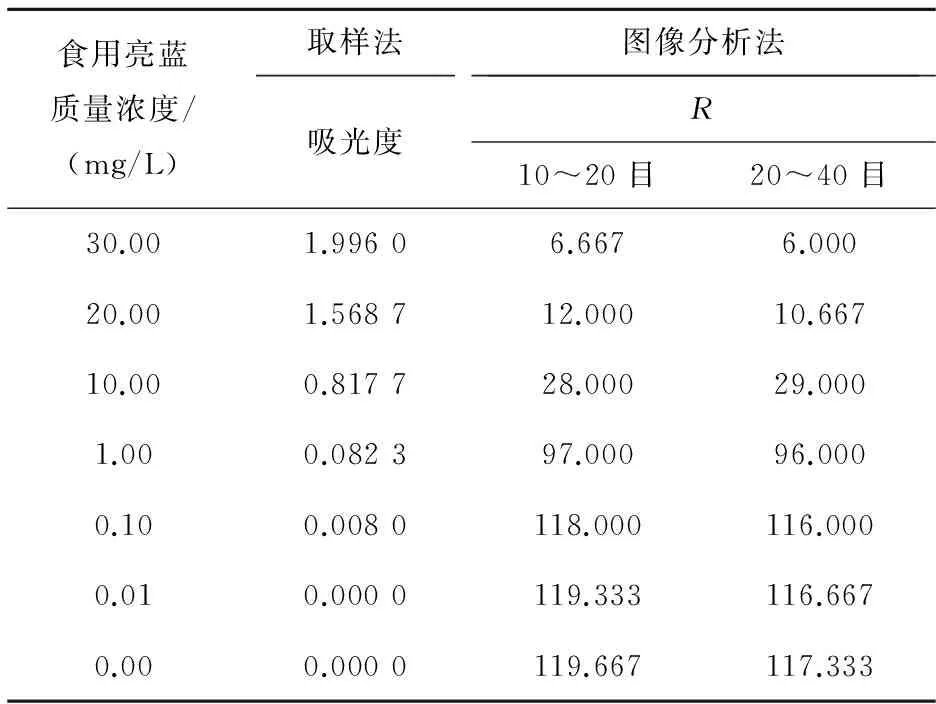
食用亮蓝质量浓度/(mg/L)取样法图像分析法吸光度R10~20目20~40目30.001.99606.6676.00020.001.568712.00010.66710.000.817728.00029.0001.000.082397.00096.0000.100.0080118.000116.0000.010.0000119.333116.6670.000.0000119.667117.333
3.1.2 R值与亮蓝质量浓度的标线拟合
对于取样法所获得的数据,当质量浓度范围扩大至0.00~30.00 mg/L时,r2为0.986 5(r为相关系数)。由图2a可知,数据的偏差主要产生于较高质量浓度的20.00 mg/L和30.00 mg/L。故舍弃这两点,进一步对0.00~10.00 mg/L的数据进行标准曲线的绘制,得出r2=1.000 0(图2b)。产生这种情况的原因是,当亮蓝溶液质量浓度达到一定程度时,对光的吸收能力逐步趋于不变,透射光强度的差异逐步变小,导致分光光度法对高质量浓度的识别能力下降。故实验中亮蓝质量浓度的测定以0.00~10.00 mg/L的标准曲线为准。当样品溶液的质量浓度大于10.00 mg/L时,需将样品的质量浓度稀释为原来的1/5,以便准确测量。
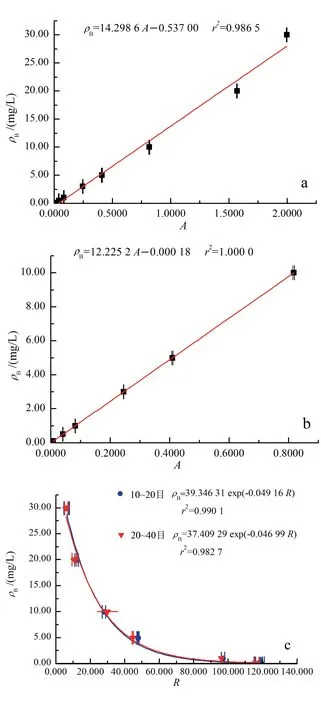
a. 0.00~30.00 mg/L,取样法;b. 0.00~10.00 mg/L,取样法;c.0.00~30.00 mg/L,图像分析法。A.吸光度。图2 亮蓝溶液的标准曲线图Fig.2 Standard curve of brilliant blue
图像分析法测得的标准曲线如图2c所示,R值与质量浓度之间的关系符合指数分布。在两种介质存在的情况下,r2均可达0.980 0以上。考虑到图像分析法检测精度的限制,将0.01 mg/L处的R值作为检测的底线,即在两种介质中,当R值分别小于119.333和116.667时,质量浓度取0.00 mg/L。最终图像分析法的标准曲线方程如下。
10~20目:

20~40目:

3.2 污染羽刻画准确度的对比
利用Sufer中的克里金插值法对实验数据进行分析,结果如图3所示。每个模拟槽内,取样法的数据量固定为36个(图1),图像分析的数据量为近300个,可根据污染羽的运移情况对污染羽边缘区域进行更为密集的取样分析。从结果对比来看,两种方法绘制的等值线图在质量浓度分布上具有相似性,均可大致描绘污染羽的运移趋势。由于取样点的增多,图像分析法有着更为精细的刻画程度。在均质的条件下:由于数据点较少,取样法所绘制的等值线(图3 a, c)在模拟槽的末端边角区域和污染物质量浓度较低的区域均出现较大误差;而图像分析法(图3 b, d)则有着较高的契合度。在非均质的条件下:取样法所得的等值线(图3 e)除存在边角区域刻画不准确问题的同时还扩大了中间低渗透区域示踪剂的运移范围;而图像分析法(图3 f)则相对准确地展示了高渗透和低渗透区域的运移情况,并且对污染物运移过程中存在的指进现象有着一定体现。
从污染羽面积的角度具体分析,利用Sufer中的“测量”工具分别对图片中的被亮蓝染色的实际污染区域和两种方法所得的等值线图的污染物质量浓度大于0.00 mg/L的区域进行测量,结果如表2所示,3种介质情况下实际污染区域分别为1 172.65、1 131.93和947.62 cm2。两种方法计算所得的面积均出现偏大的现象。在介质类型为10~20目、20~40目和非均质的条件下,取样法的误差分别为6.6%、7.2%和30.7%,图像分析法的误差分别为1.8%、4.3%和13.3%。图像分析法应用可将3种介质下的实验误差分别下降4.8%、2.9%和17.4%。因此,在污染羽刻画的准确度方面,图像分析法有着极大优势,尤其是在非均质存在的情况下可大幅提高模拟的准确度。
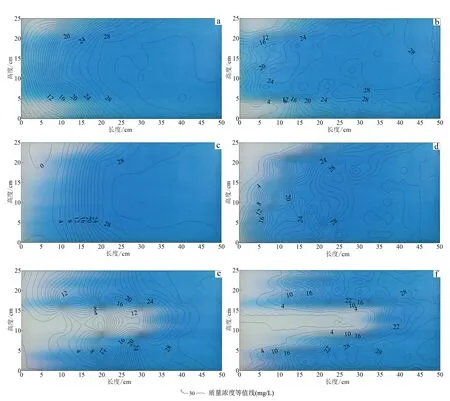
a.10~20目,取样法;b. 10~20目,图像分析法;c.20~40目,取样法;d.20~40目,图像分析法;e.非均质,取样法;f. 非均质,图像分析法。图3 3种介质的质量浓度等值线图Fig.3 Contour map of three media

介质类型实际污染面积/cm2取样法图像分析法污染面积/cm2误差/%污染面积/cm2误差/%10~20目1172.651250.006.61193.591.820~40目1131.931231.847.21180.294.3非均质947.621238.7930.71073.4813.3
3.3 模拟槽内贮存亮蓝的质量计算
3.3.1 剖分格数的确定
污染羽仅能对食用亮蓝在模拟槽内的分布情况进行定性的描述。为解决模拟槽内贮存亮蓝质量的计算问题,我们借助Matlab编写程序对图像展开进一步的处理。图像处理的基本思路为对图像内的R值进行插值处理获得数字化图像后,将图片离散化为网格,利用R值与质量浓度的函数关系计算每个网格内的污染物贮存质量,最后对所有网格的计算结果进行加和处理,从而获得模拟槽内污染物的总质量。图片离散化是对图片的长和宽进行剖分的过程,也是该程序中对计算结果影响最大的一步。探寻适当的剖分格数是质量计算的第一步。
实验中以均质条件下的实验数据探究剖分格数的最佳值。通过实验过程中的进水、出水和隔水室内的污染物质量衡算,可得实验进行8 h时,装填10~20目和20~40目介质的模拟槽内贮存的亮蓝质量分别为36.127 mg和37.299 mg。为实现较高的精确度,分别进行剖分格数为2 0002(400万)、3 0002(900万)、3 5002(1 225万)、3 6002(1 296万)、3 7002(1 369万)、3 8002(1 444万)和4 0002(1 600万)下的质量计算,结果如表3所示。由表3可知:在这2种介质条件下,亮蓝质量的计算值随剖分格数的增加而增加,当剖分格数为1 369万时,计算结果均最为贴近实际,分别为36.363 mg和38.620 mg。
以1 369万为剖分格数,分别对0~8 h的图片进行处理,获得不同时间点模拟槽内贮存亮蓝质量的计算值。为进一步验证1 369万作为剖分网格的适用性,将Matlab获得的计算值与实验过程中的实测值作比,可得图4。由图4可知,除2 h和3 h处计算值的误差较大外,其余时间点的误差均在5%左右,最低仅为0.5%。故将剖分格数最终确定为3 7002(1 369万)。
3.3.2 亮蓝运移过程中的质量累积
以最佳剖分格数对实验过程中所获得的全部图片进行处理,可得到亮蓝运移过程中的质量累积。对于非均质条件下的质量计算,尚未设计出直接计算的相关程序,需分别对不同介质区域进行计算,最终加和获得非均质条件下的亮蓝总贮存质量,结果如图5所示。由于实验过程较短,亮蓝的累积呈直线增长。

表3 不同剖分格数对质量计算结果的影响
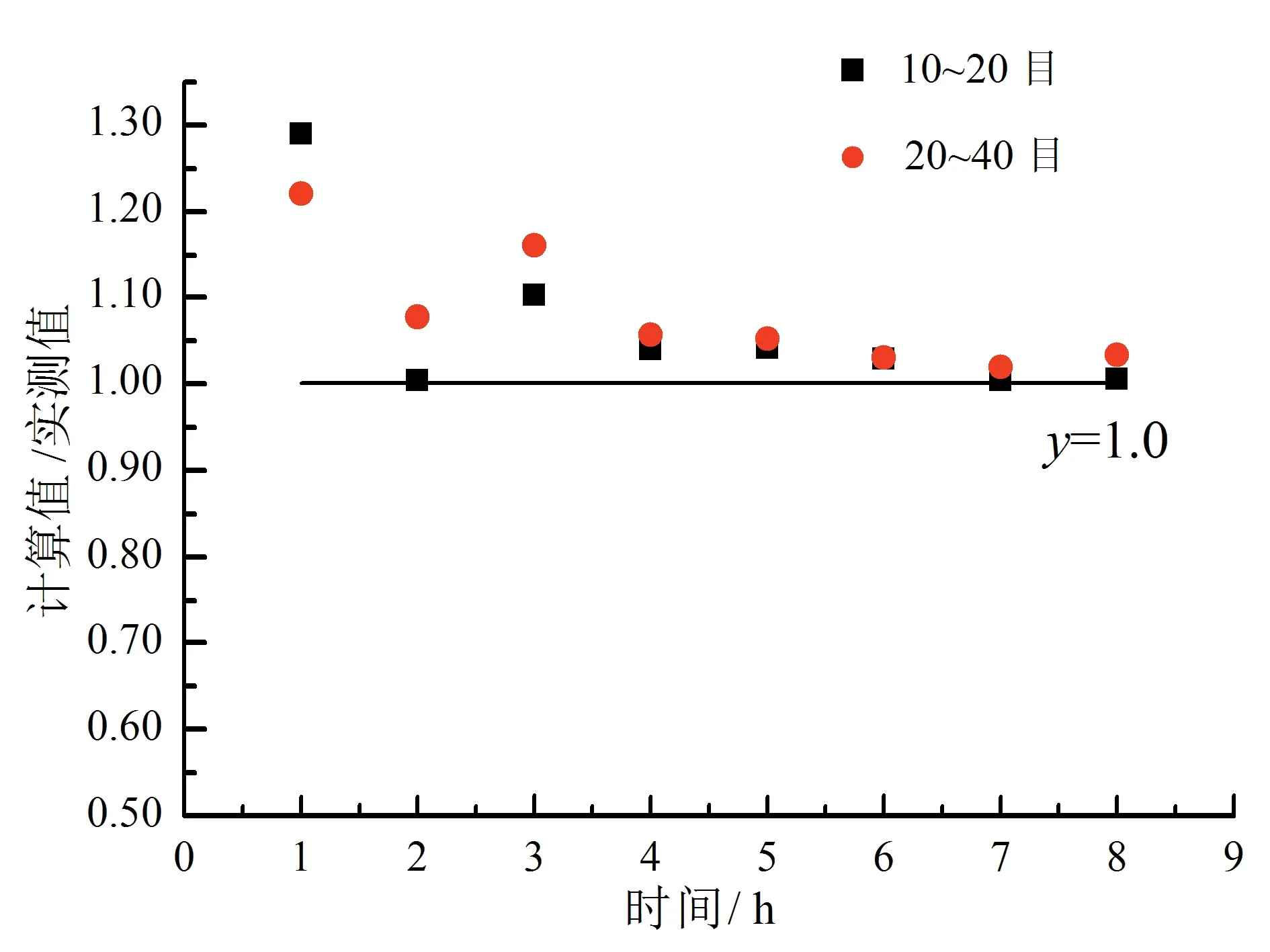
图4 不同时间点亮蓝贮存质量的计算值与实测值比较Fig.4 Comparison of the calculated number and fact number of brilliant blue mass at different time
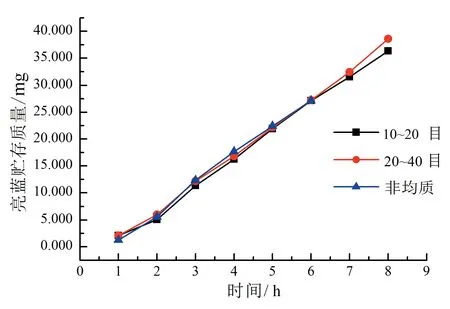
图5 不同介质条件下亮蓝的质量累积过程Fig.5 Mass cumulation of brilliant blue in different porous media
4 结论
1)图像分析法是一种监测有色示踪剂运移过程的有效手段。RGB中的R值与亮蓝质量浓度之间存在指数关系。从检测精度的角度讲,当以RGB中的R值进行亮蓝质量浓度计算时,检测检度可达0.01 mg/L,较传统取样法可提高一个数量级。从污染羽刻画的准确性角度讲,图像分析法在介质类型分别为10~20目、20~40目和两者分层混合的非均质条件下,模拟污染羽的面积误差可分别由传统取样法的6.6%、7.2%和30.7%下降为1.8%、4.3%和13.3%,提高了刻画的准确度。
2)利用自行设计的程序可实现对模拟槽内贮存的亮蓝质量进行较为准确的计算。当剖分格数为1 369万时,程序计算结果最为接近真实值。通过对实验过程中所拍摄的一系列照片进行程序计算,可实现对亮蓝贮存质量的实时监测,为进一步理解污染物的迁移规律提供支持。
(
):
[1] Konz M, Ackerer P, Huggenberger P, et al. Compa-rison of Light Transmission and Reflection Techniques to Determine Concentrations in Flow Tank Experiments[J]. Experiments in Fluids, 2009, 47(1): 85-93.
[2] Jaeger S, Ehni M, Eberhardt C, et al. CCD Camera Image Analysis for Mapping Solute Concentrations in Saturated Porous Media[J]. Analytical and Bioanalytical Chemistry, 2009, 395(6): 1867.
[3] Heidari P, Li L. Solute Transport in Low Teteroge-neity Sandboxes: The Role of Correlation Length and Permeability Variance[J]. Water Resources Research, 2014, 50(10): 8240-8264.
[4] Kashuk S, Mercurio S R, Iskander M. Visualization of Dyed NAPL Concentration in Transparent Porous Media Using Color Space Components[J]. Journal of Contaminant Hydrology, 2014, 162: 1-16.
[5] 康学远,施小清,史良胜,等.基于集合卡尔曼滤波的多相流模型参数估计:以室内二维砂箱中重质非水相污染物入渗为例[J].吉林大学学报(地球科学版),2017,47(3):848-859.
Kang Xueyuan, Shi Xiaoqing, Shi Liangsheng, et al. Inverse Multiphase Flow Simulation Using Ensemble Kalman Filter:Application to a 2D Sandbox Experiment of DNAPL Migration[J]. Journal of Jilin University (Earth Science Edition),2017,47(3):848-859.
[6] 谈叶飞, 周志芳. 有色示踪剂在溶质运移实验中的数字图像识别和处理[J]. 水文地质工程地质, 2007, 34(1): 99-101.
Tan Yefei, Zhou Zhifang. The Digital Image Recognition and Processing of Colored Tracer in the Solute Transport Experiment [J]. Hydrogeology and Engineering Geology, 2007, 34(1): 99-101.
[7] 宋小源,刘杰,郑春苗. 二维砂箱溶质示踪实验的图像分析法[J]. 环境科学学报, 2012, 32(10): 2470-2475.
Song Xiaoyuan, Liu Jie, Zheng Chunmiao.Image Analysis of Concentration Distribution in Two-Dimensional Sandbox Tracer Experiment [J]. Acta Scientiae Circumstantiae, 2012, 32(10): 2470-2475.
[8] Yang M, Annable M D, Jawitz J W. Light Reflection Visualization to Determine Solute Diffusion into Clays[J]. Journal of Contamint and Hydrology, 2014, 161: 1-9.
[9]Taylor T P, Pennell K D, Abriola L M, et al. Surfactant Enhanced Recovery of Tetrachloroethylene from a Porous Medium Containing Low Permeability Lenses: 1:Experimental Studies[J]. Journal of Contaminant Hydrology, 2001, 48(3/4): 325-350.
[10]Tatti F, Papini M P, Raboni M, et al. Image Analysis Procedure for Studying Back-Diffusion Phenomena from Low-Permeability Layers in Laboratory Tests[J]. Scientific Reports, 2016, 6: 30400.
[11] Tatti F, Papini M P, Sappa G, et al. Contaminant Back-Diffusion from Low-Permeability Layers as Affected by Groundwater Velocity: A Laboratory Investigation by Box Model and Image Analysis[J]. Science of the Total Environment, 2018, 622: 164-171.
[12] 王康. 多孔介质非均匀流动显色示踪技术与模拟方法[M].北京:科学出版社,2009.
Wang Kang. Dye Tracer Technology and Modeling Method of Heterogeneous Flow in Porous Media[M].Beijing: Science Press,2009.
[13] 余立.CMYK与RGB色彩模式的数字化差别[J]. 电脑知识与技术, 2013 (4): 2704-2705.
Yu Li. Digital Differential CMYK and RGB Color Model[J]. Computer Knowledge and Technology, 2013 (4): 2704-2705.
[14] Yang M, Annable M D, Jawitz J W. Back Diffusion from Thin Low Permeability Zones[J]. Environmental Science & Technology, 2014, 49(1): 415-422.
[15] 章艳红, 叶淑君, 吴吉春. 光透法定量两相流中流体饱和度的模型及其应用[J]. 环境科学, 2014, 35(6): 2120-2128.
Zhang Yanhong, Ye Shujun, Wu Jichun.Models for Quantification of Fluid Saturation in Two-Phase Flow System by Light Transmission Method and Its Application[J]. Environmental Science, 2014, 35(6): 2120-2128.
