基于超宽带和三边量测法的室内定位系统设计
2018-05-24刘欢笑
刘欢笑
(江苏联合职业技术学院镇江分院 信息工程系,江苏 镇江 212016)
近年来,基于位置的信息服务,如基于GPS的汽车导航、手机定位和追踪服务已广泛用于日常生活[1]。无线电信号非视距传播衰减的特性导致室内和地下场所应用效果不佳,甚至无法使用。而人们对室内定位系统却有较为强烈的实际需求,如无人智能仓储管理系统、大型商场内的导航定位等。
相较于室外应用,室内定位需要更高的精确度,但更加强烈的多径效应(Multi-path effect)制约着精确度[2]。对此,一些研究者尝试利用图像运动捕获技术弥补无线电测量的固有弱点[3-4],但有其他不足。比如,需要较多摄像机将方位信息实时传送中心计算机处理,存在部署时间长、作用距离有限、易受外界亮度变化和其他光源干扰的问题[5]。一些研究者坚持无线电定位方法,如基于RSSI(Received Signal Strength Indicator)的指纹法、基于距离的三边量测法、基于AOA(Angel of Arriving)的方法等[6-12],利用新技术手段来提高系统精确度。对于指纹法,较多研究基于Wi-Fi信号展开,通常需测量大量微格区域内信号强度构建数据库,利用室内地图和信号强度比对法确定目标位置[6]。带宽只有20 MHz,对多径效应敏感,且信号不稳定、易受外部干扰源干扰[7-8]。使用聚类算法、惯导辅助等方法能提高精确度,但尚未见满足应用需求的报道[9]。基于AOA的方法需要配置多天线阵列,低频段天线尺寸较大,软硬件系统实现困难,难以满足室内应用需求[9,12]。相对而言,三边量测法较传统,提高定位精确度的逻辑简单,只需提高无线电测距的精确度。依据Heisenberg测不准原理,信号带宽越宽,其时域脉冲越窄,峰值越集中,检测时受多径效应影响越小[13]。超宽带技术(Ultra Wide-band,UWB)是一种非正弦波窄脉冲无线通信技术[14],对多径效应具有较强免疫能力。
1 室内定位系统原理和构成
室内定位系统由模拟GPS卫星功能的锚节点(Anchor nodes)、类接收终端的标签节点(Tag nodes)、网关和显示终端组成,系统架构如图1所示。标签位置由无线通信链路实时回传PC,或者结合在线地图进一步处理后显示其运动轨迹。

图1 室内定位系统组成
三边量测法是一种利用相对距离进行交叉定位的技术[11],如图2所示。

图2 三边量测定位法示意图
假如用户坐标位置为(x,y),与参考点(xi,yi)的相对距离为di,则有距离公式
(1)

(2)
(3)
(4)
故可将用户坐标(x,y)转化为矩阵求解。当N=3时,缩减为平面内求(x,y),则p=A-1b; 当N>3时,可用p=(ATA)-1ATb求解。
利用三边量测法提高室内定位精确度,关键是降低接收机检测回波信号时受到的多径效应影响。标签和锚节点间采用双程TOA(Two-way Time of Arrival)测距方法。通常认为无线电波传播速度为定值,只要精确测量传播时间就能得到精确距离。根据Heisenberg测不准关系式

可知,信号带宽越宽,其时域脉冲越窄,存在多径效应时,多路回波交叠概率越低。超宽带信号带宽为500 MHz,时域脉宽约0.16 ns,对接收通道而言,时间分辨率已相当高,足以区分多径效应带来的其他回波,极大提高测距的精确度[14]。
2 室内定位系统的硬件设计
网关和终端技术已比较成熟,主要研究标签和锚节点设计。标签与锚节点经由无线UWB方式交互测距信息包和锚节点位置报文,藉此计算相对距离和坐标位置。标签和锚节点硬件设计基本相同,通过软件配置和下载不同驱动程序即可实现硬件节点的功能转换。如图3所示,标签节点由主控模块(框内部分)、UWB测距定位模块、Zigbee通信模块等组成。主控实现系统控制、上位机通信、模块间数据交互、系统供电等功能; UWB测距模块完成距离测量和位置解算; Zigbee通信模块实现与网关的数据交互。
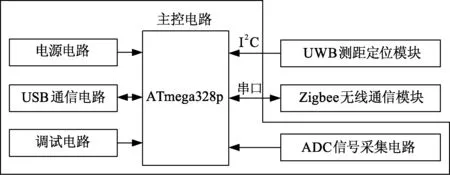
图3 标签(锚)节点硬件电路组成
2.1 标签节点主控电路设计
主控模块是标签节点的控制中枢,由微控制器、USB通信电路、电源电路、调试电路和ADC信号采集电路组成。综合考虑功能、成本、功耗、设计复杂度,微控制器选用ATmega328P单片机,该单片机具备16 MHz主频、32 KB程序存储空间、2 KB内部SRAM空间、集成8通道10位ADC采样器、内外部中断源、I2C通信接口、1路异步串行接口,完全满足设计需求[15]。USB用于上位机通信,主要是数据传输和基于USB在线调试,传输带宽要求不高,因此,选择CH340G实现USB转异步串口功能,通过USB提供仿真串口,电路设计如图4所示。
电源电路提供硬件节点所需的+5 V和+3.3 V电压。采取DC/DC降压器件串接LDO器件方式设计,可保证电源效率,减少开关频率影响。考虑应用需求,采用USB和锂电池双供电模式,锂电池优先。选用LM358为比较器,SI2301为开关控制器,同时供电时,LM358同相输入端电压大于反相输入端的+3.3 V电压,SI2301控制信号为高电平,它将进入关断状态,USB供电被断开,电路实现如图5所示。
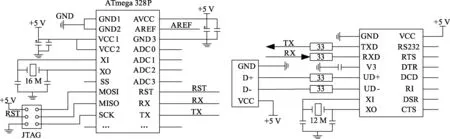
图4 微控制器和USB通信电路
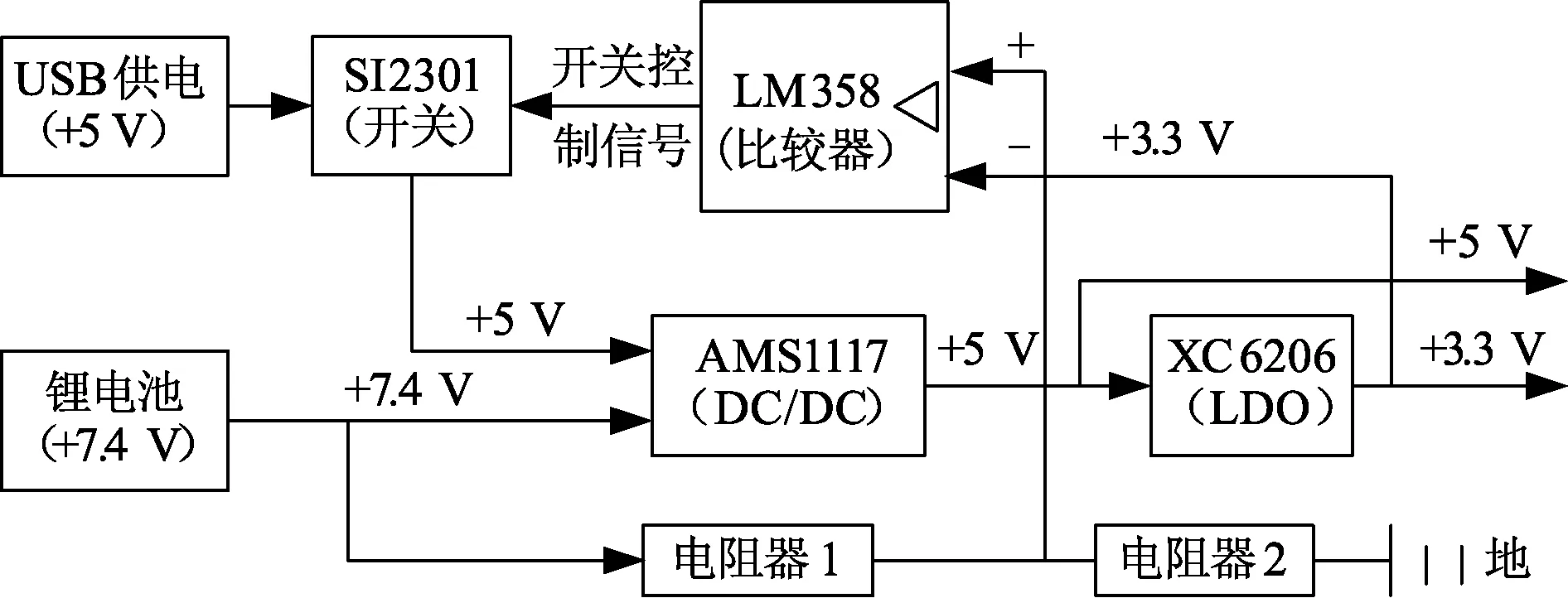
图5 标签节点电源供电电路
2.2 标签节点UWB测距模块
由于模块采用双程TOA测距方法,标签和锚节点之间无需同步操作。UWB模块通过I2C总线和IRQ中断请求功能与主控电路交互信息。依据IEEE 802.15.4A标准的测距协议,标签节点发出测距请求包,确认请求帧和时间戳收到,便可以计算两者相对距离[14]。锚节点坐标位置可预先获取,一旦得到3个以上锚节点位置及其相对距离,MCU内固件程序便可基于三边量测法实时解算标签节点的位置。UWB模块功能框图如图6所示,物理层协议芯片采用DW1000器件,兼容IEEE 802.15.4A UWB标准,支持从3.5 GHz到6.5 GHz的4个RF频带,可通过SPI接口与MCU通信[14]。它的信号时间戳分辨力可达15 ps,测距精确度达到厘米级。除了距离,定位算法还可融合IMU和高度计信息,进一步提高定位精确度,实现3D应用。

图6 标签(锚)节点测距与定位解算模块
2.3 标签节点Zigbee通信模块设计
Zigbee通信模块将标签节点解算的坐标位置回传网关。鉴于系统传输带宽要求不高,采用XBee通信模块设计,使用ISM通信频段,发射功率1 mW,直接序列扩频通信抗干扰能力强,室内作用距离30 m,TTL异步串行通信方式[16],电路详见图7。

图7 XBee无线通信模块设计
3 室内定位系统的固件程序设计
室内定位系统的固件程序主要有主控程序和UWB模块驱动程序。主控程序负责程序初始化配置、与UWB模块的I2C通信、数据通信、人机交互等。初始化配置包括ATmega328p微控制器、UWB模块和Zigbee无线通信链路功能的初始化; 响应UWB模块的通信中断请求,并通过I2C总线方式获取距离和定位解算信息; 控制无线数据通信链路,传输定位解算信息到Xbee模块的数据缓冲区,经由射频发射机、天线辐射发送到网关节点。主控程序业务流程如图8所示。
UWB模块微处理器具备无线电测距和实时位置解算功能。前者主要是通过SPI接口利用DW1000器件发出测距请求和接收响应数据。后者主要是存储和处理接收到的无线电信号飞行时间(Flight of Time)、处理延迟时间等信息,通过这些数据计算标签和锚节点的相对距离,并利用三边量测法解算标签的坐标位置。解算前,解算程序先使用Grubbs检验方法对获取的数据进行“野值”剔除和扩展卡尔曼滤波处理,以降低测量过程和通信链路中存在的噪声对定位精度的影响。另外,还可以结合IMU信息、高度计等传感器获取的数据,经过加权融合处理,进一步提高定位精确度。

图8 主控软件业务流程图
4 室内定位系统构建和验证
基于前节描述的室内定位系统的工作原理和软硬件设计方案,设计如图9所示的硬件节点,可配置为标签或锚节点。为验证所设计节点和定位系统的功能,创设如下实验场景:在长6 m,宽7.5 m的房间内,4个角落分别部署1个静止的锚节点,将标签节点放置在小车上按照图10中箭头指示方向移动,每隔一定时间停止并进行测距和定位操作,使用更高精度激光测距仪采集标签节点所在位置坐标,形成可信数据集(The Ground Truth Set),以便与标签节点获得的位置数据比对。实验比对结果如图10所示。另外,与前述各类方法的性能对比如表1所示。

图9 研制的标签(锚)节点硬件

图10 空房间内轨迹测量对比

名称精确度价格复杂度受干扰情况基于图像的运动捕获处理技术毫米量级高中受光线变化和其它光源干扰基于Wi-Fi的指纹特征定位技术分米量级中高多径效应和其它射频干扰源基于超宽带和三边量测法技术厘米量级低低多径效应,有一定免疫能力
虽然基于超宽带和三边量测法构建的室内定位系统与基于图像的方式在定位误差指标上存在较大差距,但它不受室内光线变化的影响,即使在黑暗环境中亦可正常使用,如地下矿井的弱光环境下; 它的定位精确度要优于分米量级的基于Wi-Fi信号指纹特征的方法,且无需提前大量测量室内的信号强度构建数据库。不过,为了获得更好的定位效果,最好在正式使用前进行初始化测量校准。
5 结束语
超宽带技术具备非常窄的短脉冲,在测距精确度上具有应用优势。自行设计标签和锚节点的软硬件,利用超宽带技术和三边测量法构建室内定位系统方案,实现了室内对象的定位功能。构建的实现系统验证结果表明,系统能实时定位标签节点运动轨迹,具有相对较高的定位精确度,达到了厘米量级,但在多传感器系统融合方面还有提升空间。
参考文献:
[1] 唐科萍,许方恒,沈才樑.基于位置服务的研究综述[J].计算机应用研究,2012,29(12):4432-4436.
[2] LEE H, HAN B, SHIN Y, et al. Multipath characteristics of impulse radio channels[J].IEEE Vehicular Technology Conference, 2000,3(3): 2487-2491.
[3] ROY N, NEWMAN P, SRINIVASA S. Towards a swarm of agile micro quadrotors[J].Robotics: Science & Systems, 2012,35(4): 287-300.
[4] LUPASHIN S, HEHN M, MUELLER MW, et al. A platform for aerial robotics research and demonstration: the flying machine arena[J].Mechatronics, 2014,24(1):41-54.
[5] NGUYEN T M , ZAINI A H, GUO K X, et al. An ultra-wideband-based multi-UAV localization system in GPS-denied environments[EB/OL].[2017-05-10]. http://www.imavs.org/papers/2016/56_IMAV2016_Proceedings.pdf.
[6] BALBJI B, XU J, NWOKAFOR A, et al. Sentinel: occupancy based hvac actuation using existing Wi-Fi infrastructure within commercial buildings[C]// PETYIOLI C,COX L,WHITEHOUSE K. Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems. NewYork: ACM, 2013:17.
[7] 曾鹏飞.基于WiFi信号强度与多传感器信息融合的室内定位系统研究[D].无锡:江南大学,2014:1-60.
[8] GUO K X, QIU Z R, MENG W, et al. Ultra-wideband based cooperative relative localization algorithm and experiments for multiple unmanned aerial vehicles in GPS denied environments[J].International Journal of Micro Air Vehicles,2017, 9(3):169-186.
[9] 张慧.基于WiFi指纹与惯性导航的巡库员室内定位及跟踪系统的研究与实现[D].上海:东华大学,2017:1-100.
[10] 肖岩.脉冲超宽带收发机关键技术研究与实现[D].郑州:郑州大学,2016:1-103.
[11] AMMAD A J.基于超宽带技术的室内导航系统设计[D].重庆:重庆大学,2016:1-63.
[12] LI W C, TANG Q, HUANG C F. A new close form location algorithm with AOA and TDOA for mobile user[J]. Wireless Personal Communications, 2017(4):1-20.
[13] Wikipedia Corporation. Heisenberg uncertainty principle[EB/OL].[2017-03-10].https://en.wikipedia.org/wiki/Uncertainty_principle.
[14] DecaWave Corporation. DW1000 datasheet [EB/OL].[2017-03-20]. https://decawave.com/support.
[15] Atmel Corporation. ATmega328 datasheet [EB/OL].[2017-03-18].http://www.atmel.com/zh/cn/devices/ATMEGA328.aspx?tab=documents.
[16] DIGI Corporation. XBee datasheet [EB/OL].[2017-05-20].https://www.digi.com/resources/documentation/digidocs/PDFs/90000982.pdf.
