基于差动和自主转向协调的分布式驱动无人车轨迹跟踪∗
2018-05-22卢山峰蔡英凤
徐 兴,卢山峰,陈 龙,蔡英凤, 李 勇
(1.江苏大学汽车与交通工程学院,镇江 212013; 2.江苏大学汽车工程研究院,镇江 212013)
前言
无人车具有提高车辆安全性和道路利用率以及减少运输成本的优势,包括我国在内很多国家都在对其进行研究。同时,分布式驱动车的轮鼓电机使各驱动轮有灵活、快速和准确的转矩响应[1-2],使分布式驱动电动汽车具有改善车辆操纵性、灵活性和安全性的潜力[3],因此,分布式驱动无人车能提高车辆的灵活性、轨迹跟踪能力和安全性[4]。
轨迹跟踪是实现无人驾驶的必要条件之一,国内外很多学者对无人驾驶的轨迹跟踪进行了研究,应用模糊控制[5]、神经网络控制[6]、鲁棒控制[7]、模型预测控制[8-9]等控制算法实现无人车对参考轨迹的有效跟踪;但在上述控制算法中预瞄时间为定值,不能满足无人车在不同行驶工况时的要求,即弯道行驶时,驾驶员的预瞄距离应较小,直线行驶时,预瞄距离应增大;针对这个问题有学者提出了预瞄时间自适应控制[10],提高了车辆轨迹跟随能力和行驶稳定性。
目前,针对分布式驱动无人车轨迹跟踪的分析研究还较少,有学者基于状态反馈法提出了针对轮式差动转向无人车的运动跟踪控制[11];也有学者针对分布式驱动无人车,研究基于自主转向的轨迹跟踪控制器[12];同时,有学者进行了轨迹跟踪时自主转向与横摆力矩联合控制的研究,提高了车辆的行驶稳定性[13]。与传统汽车相比,分布式驱动无人车不仅可通过自动控制转向电机调节无人车转向轮转角,还能通过左右驱动轮转矩差动输出实现车辆系统转向;但目前尚无有关差动转向与自主转向协调控制的研究,而通过协调控制实现对跟踪参考轨迹和参考横摆角两种控制目标的优化,有利于提高车辆的灵活性和轨迹跟踪能力。
本文中针对一款分布式驱动无人车进行跟踪定轨迹的研究,提出基于预瞄时间自适应控制的轨迹跟踪,设计预测模型控制器控制自主转向的转角,通过模糊控制器实现预瞄时间的自适应控制;同时研究基于参考横摆角的差动转向轨迹跟踪;最后,引入差动转向与自主转向权重系数的方法,实现了差动和自主转向协调的轨迹跟踪控制。
1 无人车自主转向系统的轨迹跟踪
1.1 基于参考轨迹的自主转向轨迹跟踪
以车辆动力学模型和轮胎模型为基础,应用线性时变模型预测控制(LTV MPC)算法设计轨迹跟踪控制器,通过前轮自主转向控制车辆,在保证车辆稳定性的前提下,实现轨迹跟踪。为研究车辆轨迹跟踪时纵向动力学特性、横向动力学特性和车辆横摆动力学特性,利用省略了悬架特性的车辆2自由度模型研究车辆的动力学模型,车辆2自由度模型如图1所示,XOY为地面的惯性坐标系,xoy为车辆坐标系。

图1 车辆的2自由度模型
为降低LTV MPC控制器的计算复杂度,提高其实时性,对车辆动力学模型进行适当简化和降维。现结合车辆动力学模型和轮胎模型建立了车辆非线性动力学模型[14]:
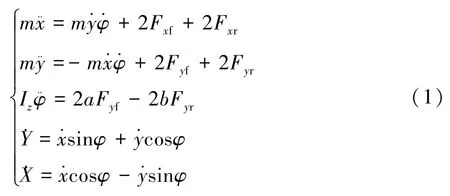
式中:Fxf和Fxr为前、后轮胎受到的x方向的力;Fyf和Fyr为前、后轮胎受到的y方向的力;a和b分别为质心到前、后轴的距离;m为车辆整备质量;Iz为车辆绕z轴的转动惯量;φ为车辆横摆角;最后两式为坐标系之间的转换关系式。
轮胎在x和y方向上的轮胎力表示为

式中:Fl,i和Fc,i分别为前、后轮胎的纵向力和侧向力,i={f,r} 表示前、后轮。
上述车辆非线性动力学模型的微分方程为

在该系统中,控制量为u(t)=[δf],状态量为由于无人车在行驶时对控制器的实时性要求较为严格,非线性预测控制难以满足要求,因此须对非线性动力学模型实时线性化,得到线性时变方程[15]为

其中
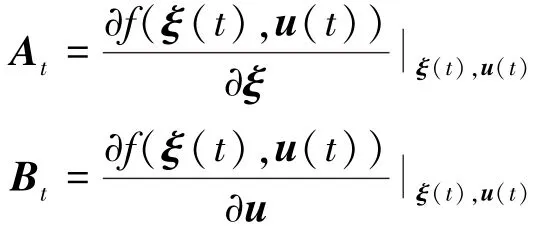
式中A t和B t为雅克比矩阵。
模型预测控制器控制过程中追求的最优解是以最小转角输入获得最佳的轨迹跟踪效果,相应的目标函数[14]为
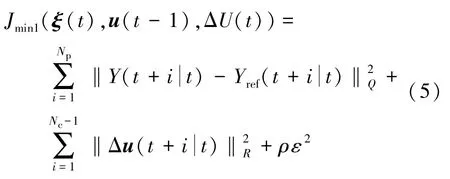
式中:Np和Nc分别为预测步长和控制步长;控制输入增量为松弛因子为输出轨迹;Q,R和ρ为权重系数。
优化模型如式(6)所示,综合目标函数和约束条件,基于非线性动力学模型的模型预测控制器解决每个时刻的优化求解问题;最后将最优解作用于系统,实现自主转向下的轨迹跟踪控制。
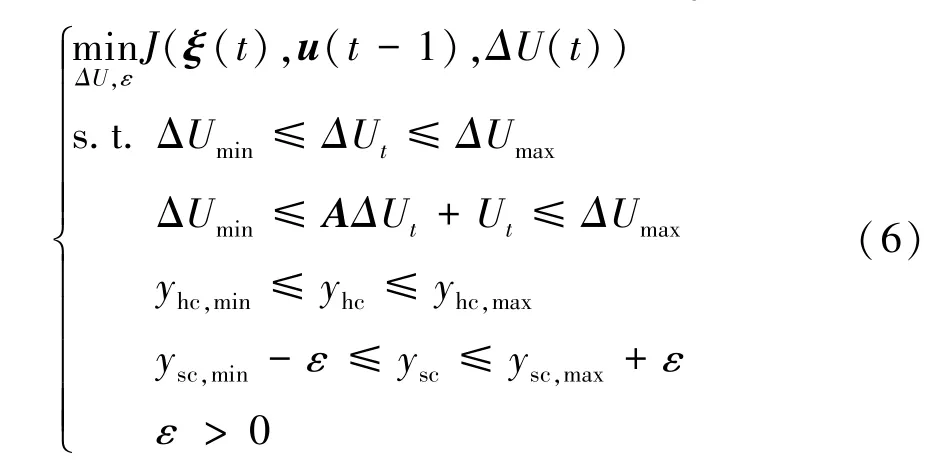
式中:yhc,min和yhc,max分别为输出量硬约束的上、下边界;ysc,min和ysc,max分别为输出量软约束的上、下边界;
1.2 基于模糊控制的预瞄时间自适应
轨迹跟踪驾驶员模型中的预瞄时间取值范围一般为0.6~2.0s[10];在上述MPC控制器中,由于预测步长Np和采样周期都为定值,故其预瞄时间为0.6~2.0s之间的定值;但是汽车行驶在复杂轨迹时,若预瞄时间较小,车辆为跟随参考轨迹容易产生摆荡而降低行驶稳定性;但若预瞄时间过长,容易降低轨迹跟随能力。因此,为使上述的轨迹跟踪控制克服此问题,提出了预瞄时间自适应控制策略,使车辆在直线工况时增加驾驶员预瞄时间,提高车辆的稳定性;在转向工况时减小驾驶员预瞄时间,提高车辆的轨迹跟随能力。定义基于横摆角的控制目标函数为

式中φref为参考横摆角。
为实现上述优化目标,提出了基于模糊控制算法的预瞄时间自适应方法,将目标横摆角与实际值的误差e和误差变化率ec作为模糊控制器的输入量,只输出参数U,用于计算预瞄时间,并进行了仿真对比分析。图2和图3分别为不同车速时固定预瞄时间为0.8s和预瞄时间自适应下的轨迹跟踪仿真结果。可以看出,在车速为30和50km/h时,无人车在预瞄时间自适应控制下能够较好地跟踪参考轨迹,在最后的直线路段未出现摆荡。预瞄时间的仿真结果如图4所示。当弯道行驶时,预瞄时间减小,提高了无人车轨迹跟踪的准确性,在驶入直线路段后,预瞄时间增加,提高了行驶稳定性。
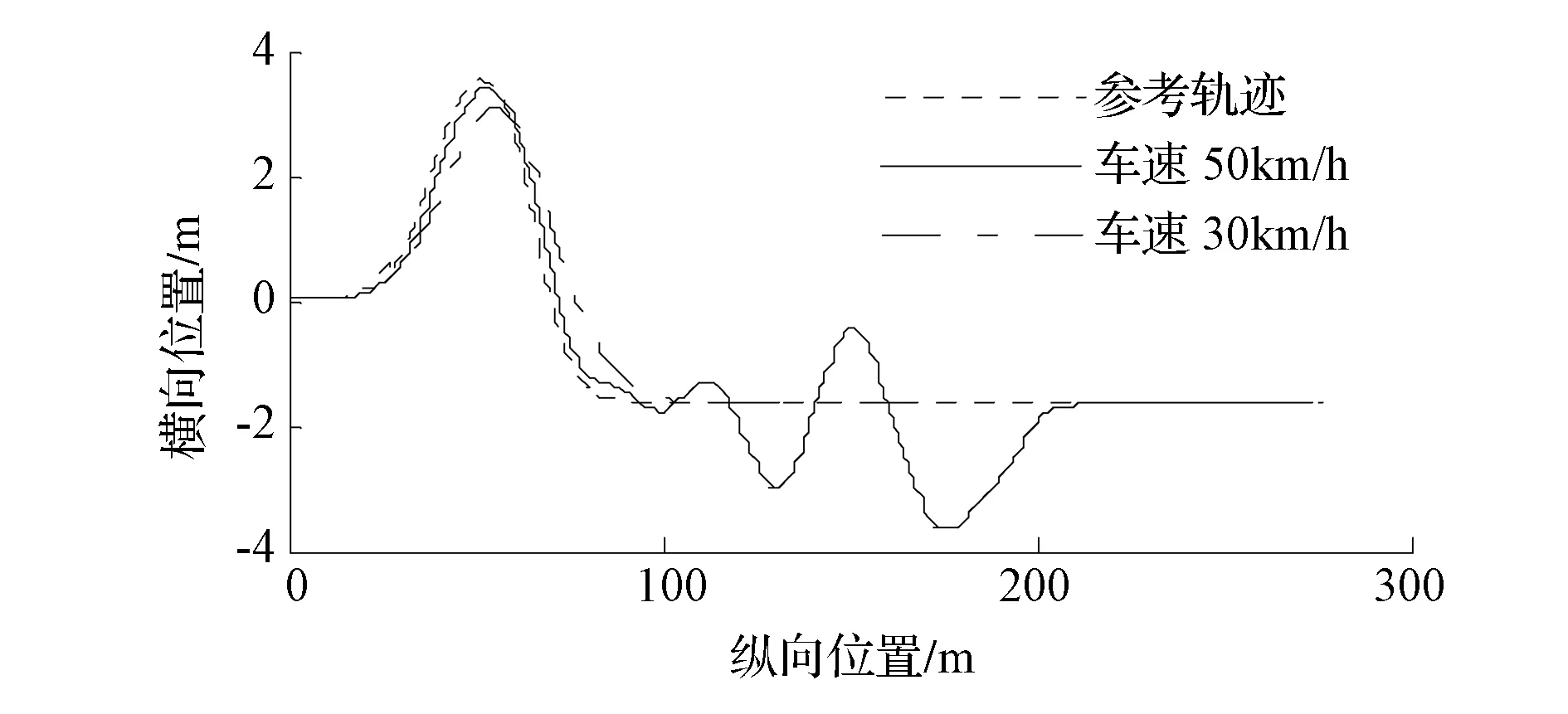
图2 固定预瞄时间下的行驶轨迹
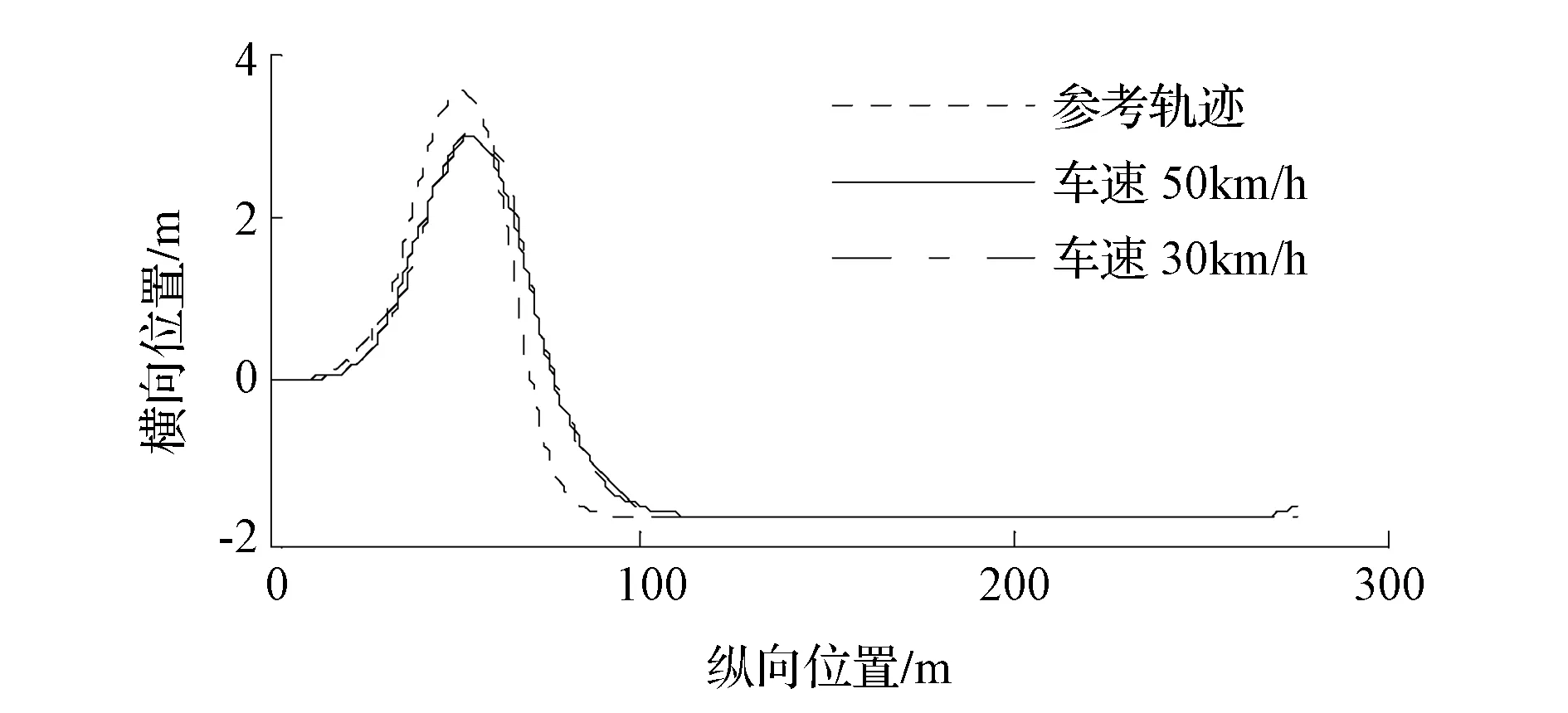
图3 预瞄时间自适应下的行驶轨迹
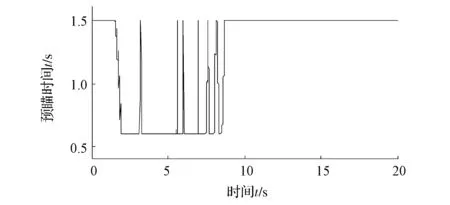
图4 预瞄时间
2 分布式驱动无人车差动转向的轨迹跟踪
图5为分布式驱动无人车的结构简图,本文中研究的分布式驱动无人车为前轮驱动前轮转向,可通过转向电机实现前轮自主转向,同时由于轮鼓电机具有独立可控和响应迅速的特点,故可控制左右轮鼓电机输出力矩进行差动主动转向,实现差动转向下的轨迹跟踪。
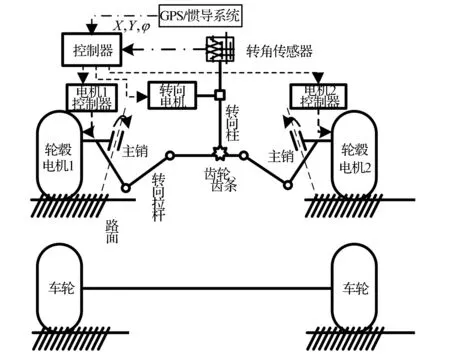
图5 分布式驱动无人车的结构简图
在参考目标轨迹下,车辆行驶过程中存在相应的参考横摆角;为实现差动转向轨迹跟踪,使车辆行驶过程中跟踪参考横摆角,设计了基于参考横摆角的轨迹跟踪目标函数:

为实现上述控制目标,设计了如图6所示的控制策略,以参考横摆角与实际横摆角差为反馈控制变量,利用变积分PID控制计算左右轮鼓电机的驱动力矩差,并经过差动转向控制器进行驱动力的分配,使车辆行驶中产生横摆力矩进行主动转向,跟踪参考横摆角实现分布式驱动无人车的差动转向轨迹跟踪。
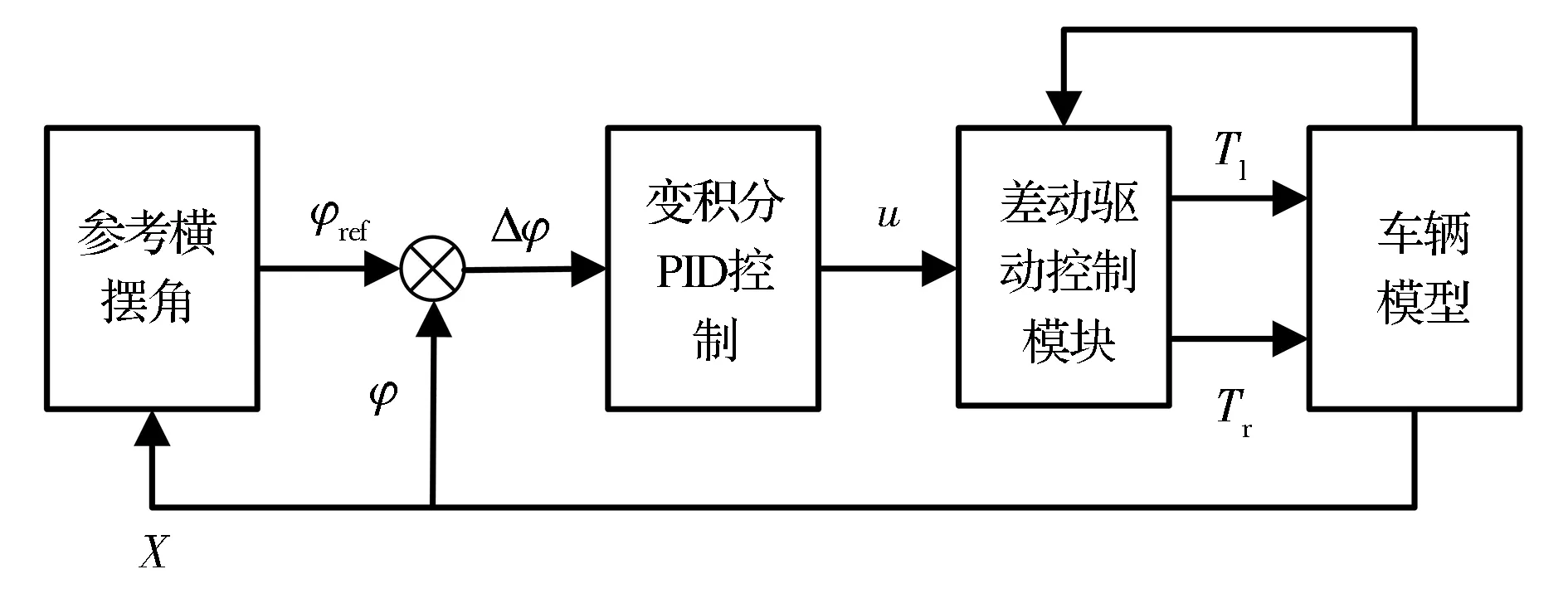
图6 基于差动转向轨迹跟踪控制策略
3 分布式驱动无人车转向协调的轨迹跟踪
为实现差动转向与自主转向轨迹跟踪的联合控制,设计了联合控制目标函数,其表达式为

式中:k1和k2为权重系数,分别对应输入的转向角和轮鼓电机转矩控制信号的权重。
为实现自主转向和差动转向协调的轨迹跟踪,设计了协调控制策略见图7,主要包括自主转向轨迹跟踪控制、差动转向轨迹跟踪控制和协调控制3部分:自主转向是基于预瞄时间自适应的MPC控制器根据位置信号和横摆角计算出车辆的转向角;差动控制系统是根据横摆角计算出所需的差动力矩;协调控制根据权重系数k1和k2分配得出最终的转向角和左右轮鼓电机的驱动力矩。差动转向轨迹跟踪的比重过大会增加横摆角速度,使车辆的稳定性变差;为确定权重系数k1和k2,进行了不同车速和权重下的仿真,根据参考轨迹和横摆角速度的对比,最终确定权重系数k1和k2分别为0.6和0.5。
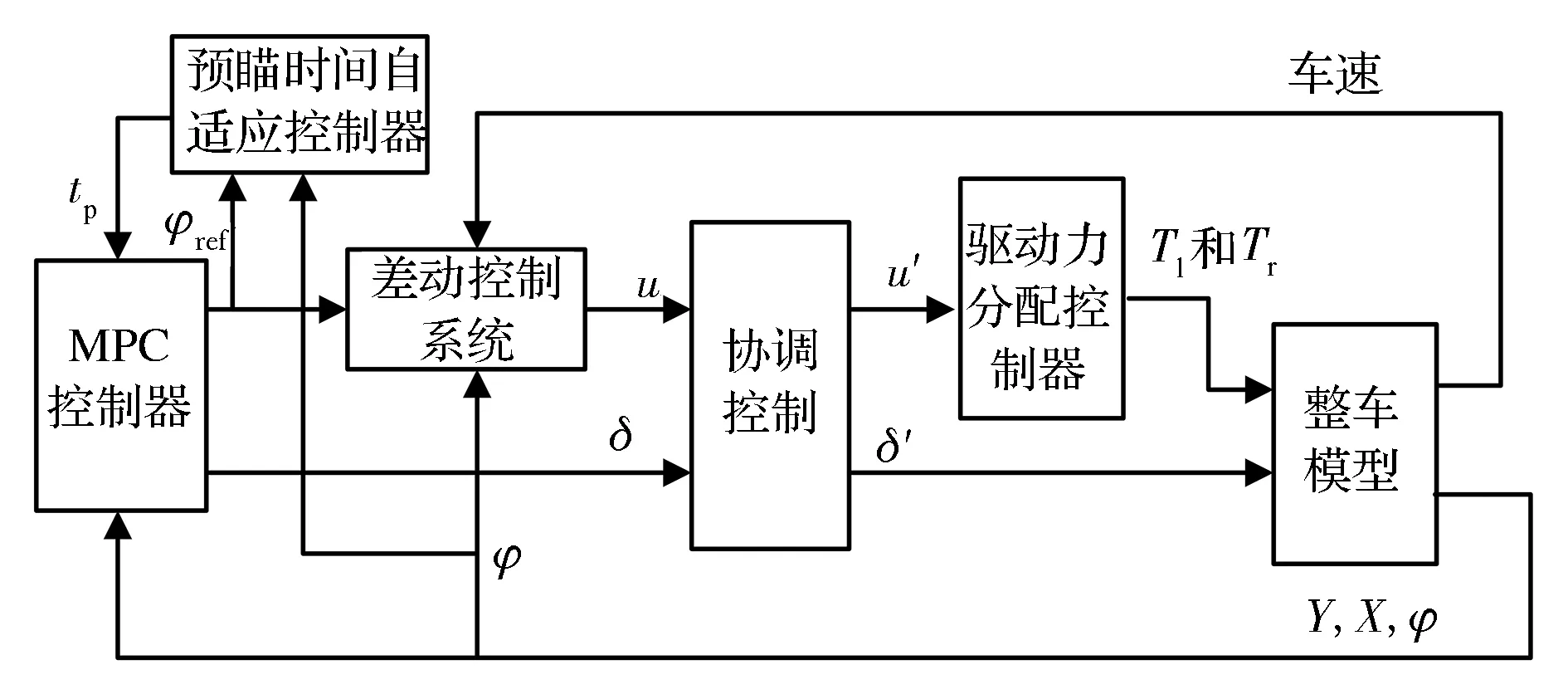
图7 基于协调控制的轨迹跟踪控制策略
为验证协调控制策略的可行性,在Matlab与Carsim的联合仿真模型中进行了不同车速下双移线轨迹跟踪的仿真,其中整车参数如表1所示。
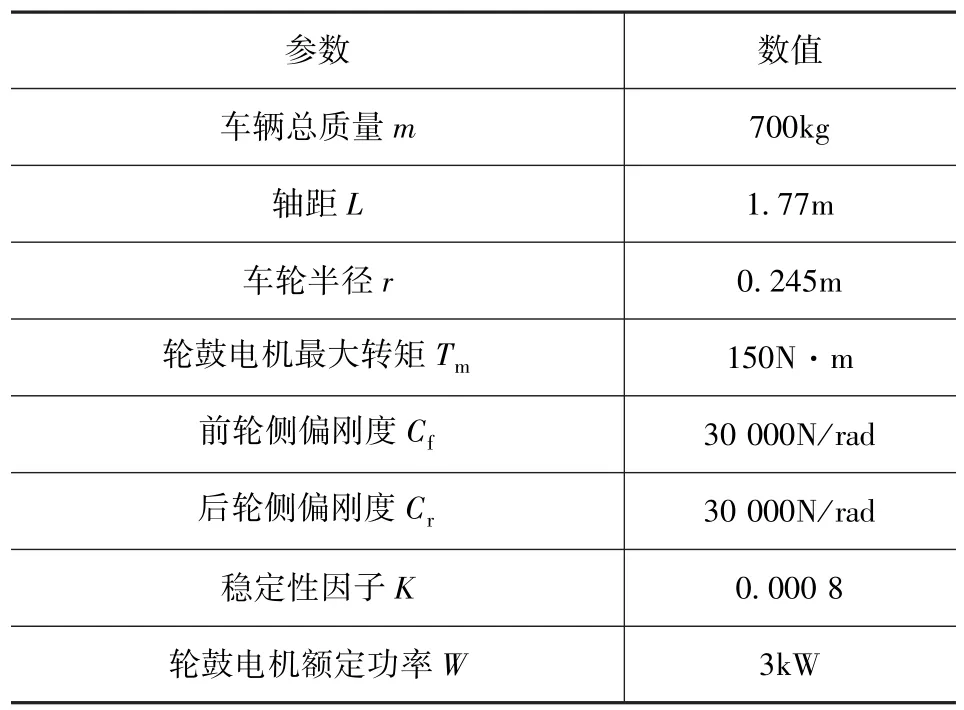
表1 整车参数
图8和图9分别为30km/h时速下左右轮鼓电机驱动转矩和角速度。由图可见,由于转矩差的存在使左右轮出现差速,从而实现协调控制中的差动转向。图10和图11分别为30km/h时速下行驶轨迹和车辆横摆角的对比。由图可见,协调控制下的行驶轨迹比单独进行自主转向和差动转向时更加接近参考轨迹,横摆角亦是如此。为了分析在不同车速下协调控制的轨迹跟踪效果,进行了50和70km/h时速时的仿真,如图12和图13所示。由图可见,协调控制能提高无人车轨迹跟踪的准确性,说明不同车速下协调控制轨迹跟踪是可行的,提出的协调控制策略能提高轨迹跟踪的可靠性。

图8 左右轮鼓电机转矩
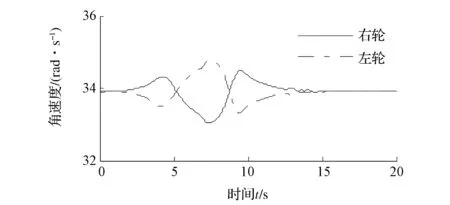
图9 左右轮鼓电机角速度
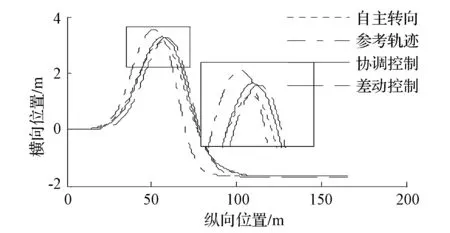
图10 30km/h时行驶轨迹
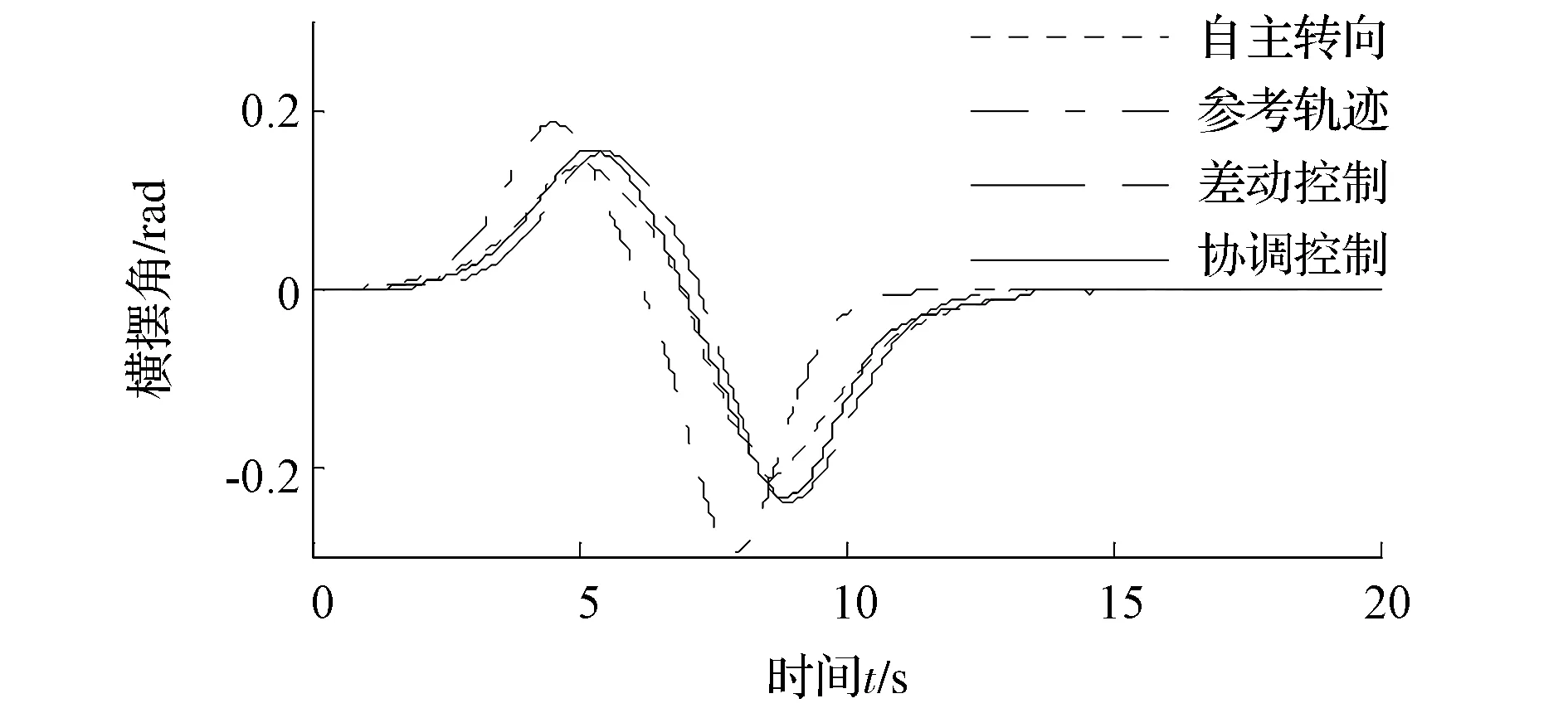
图11 30km/h时横摆角
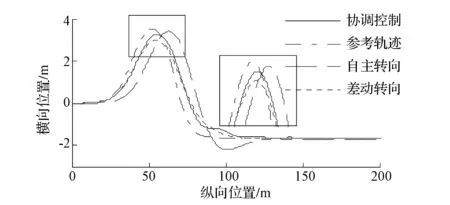
图12 50km/h时行驶轨迹
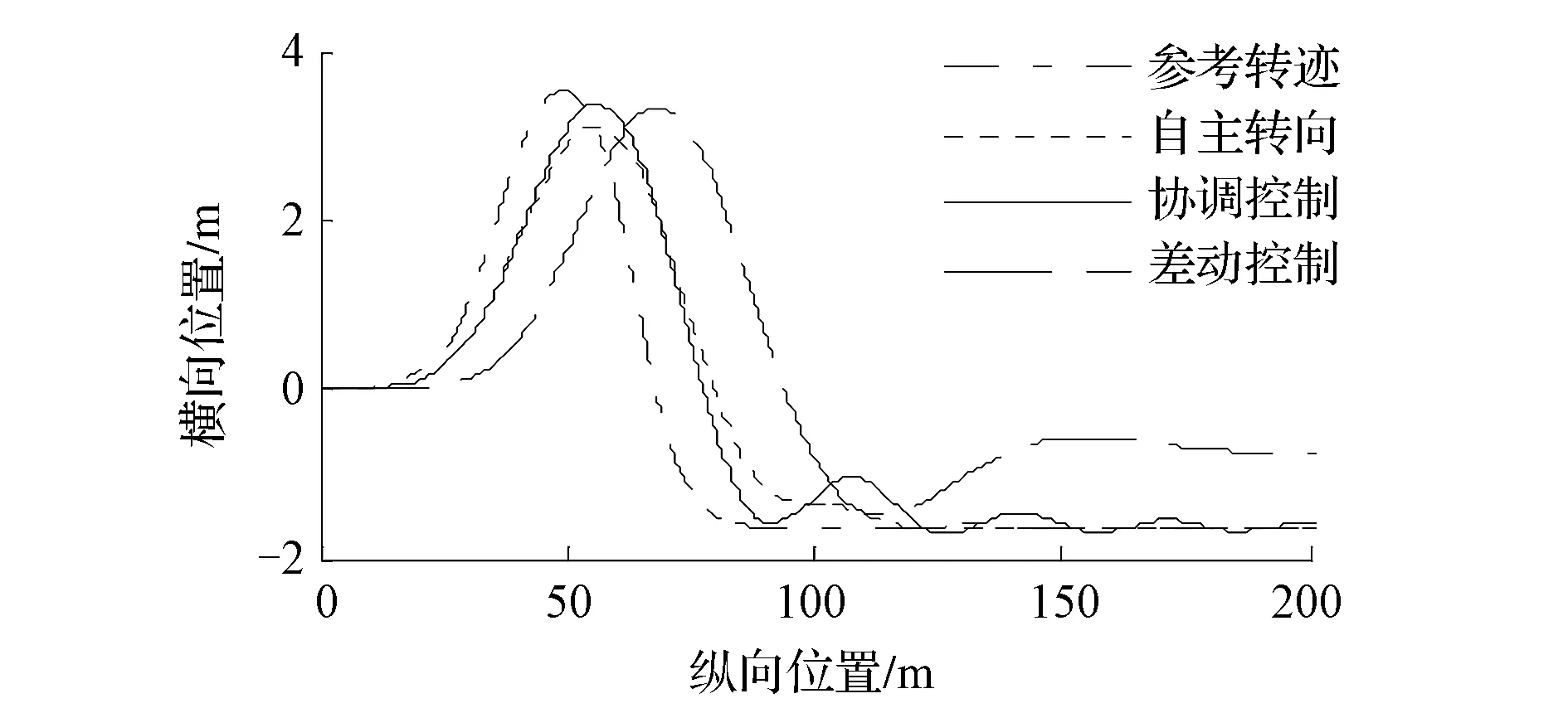
图13 70km/h时行驶轨迹
图14为无人车30km/h时速下的横摆角速度。由图可见,在协调控制下横摆角速度增加,但仍在可接受范围之内,不会对车辆的稳定性产生恶劣的影响。图15为无人车自主转向下的转向角。由图可见,基于差动转向轨迹跟踪的转向角为0°。协调控制时在差动转向的作用下,其转向角明显小于自主转向时的转向角,大大提高了车辆的转向灵活性和响应速度,因此能改善无人车轨迹跟踪能力。图16为车辆的转向力矩。由于差动转向时会使前轮产生一个绕主销的转向力矩,因此会使前轮发生转动。为控制转向角,转向电机会产生力矩约束,抑制前轮转向,因此当存在差动时会产生较大转向力矩,但由于转向力矩与前轮转向的方向一致,反而有利于提高自主转向的响应速度。
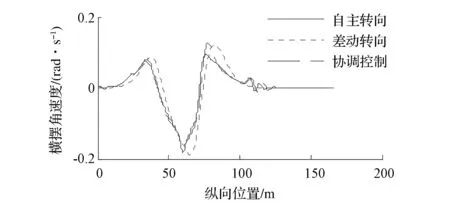
图14 横摆角速度
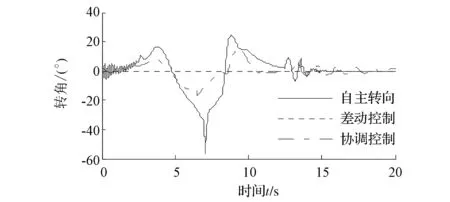
图15 转向角
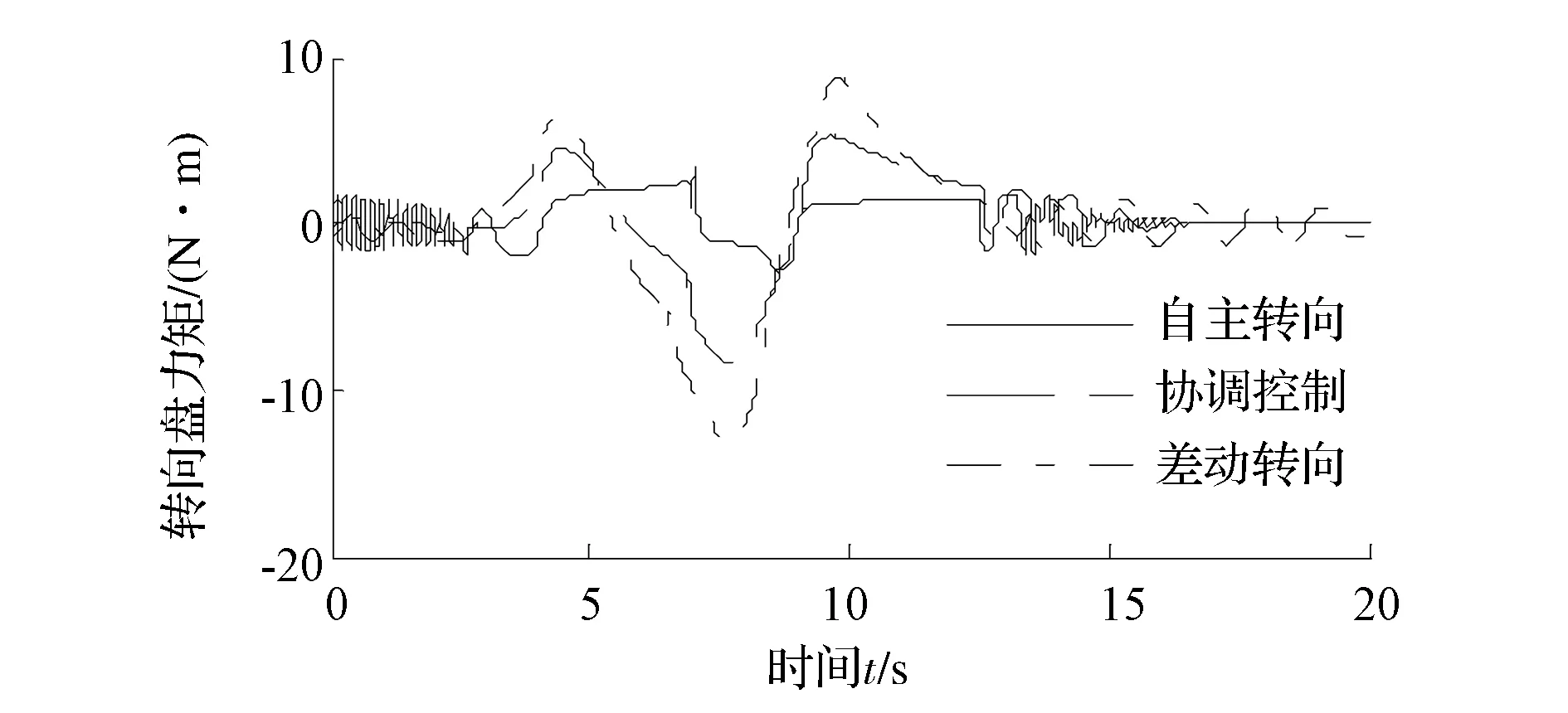
图16 转向力矩
4 实车实验验证
实验样车为前轮轮鼓电机驱动和前轮转向的分布式驱动电动车,如图17所示。车顶上方GPS/INS惯性导航系统与基站差分,其位置精度达到2cm,通过CAN通信可以采集车辆行驶中的经纬度、横摆角速度和横摆角等信号,在实验前采集一段曲线行驶的轨迹作为参考轨迹。本文中实验样车为人机共驾的形式,因此保留了车辆转向盘在内的转向系统。利用模拟量输入模块和频率量输入模块实时处理采集到的传感器信号,快速原型控制器计算得到所需的控制信号通过PWM输出通道作用于各轮鼓电机控制器、转向电机控制器和自动制动电机控制器,如图18所示。
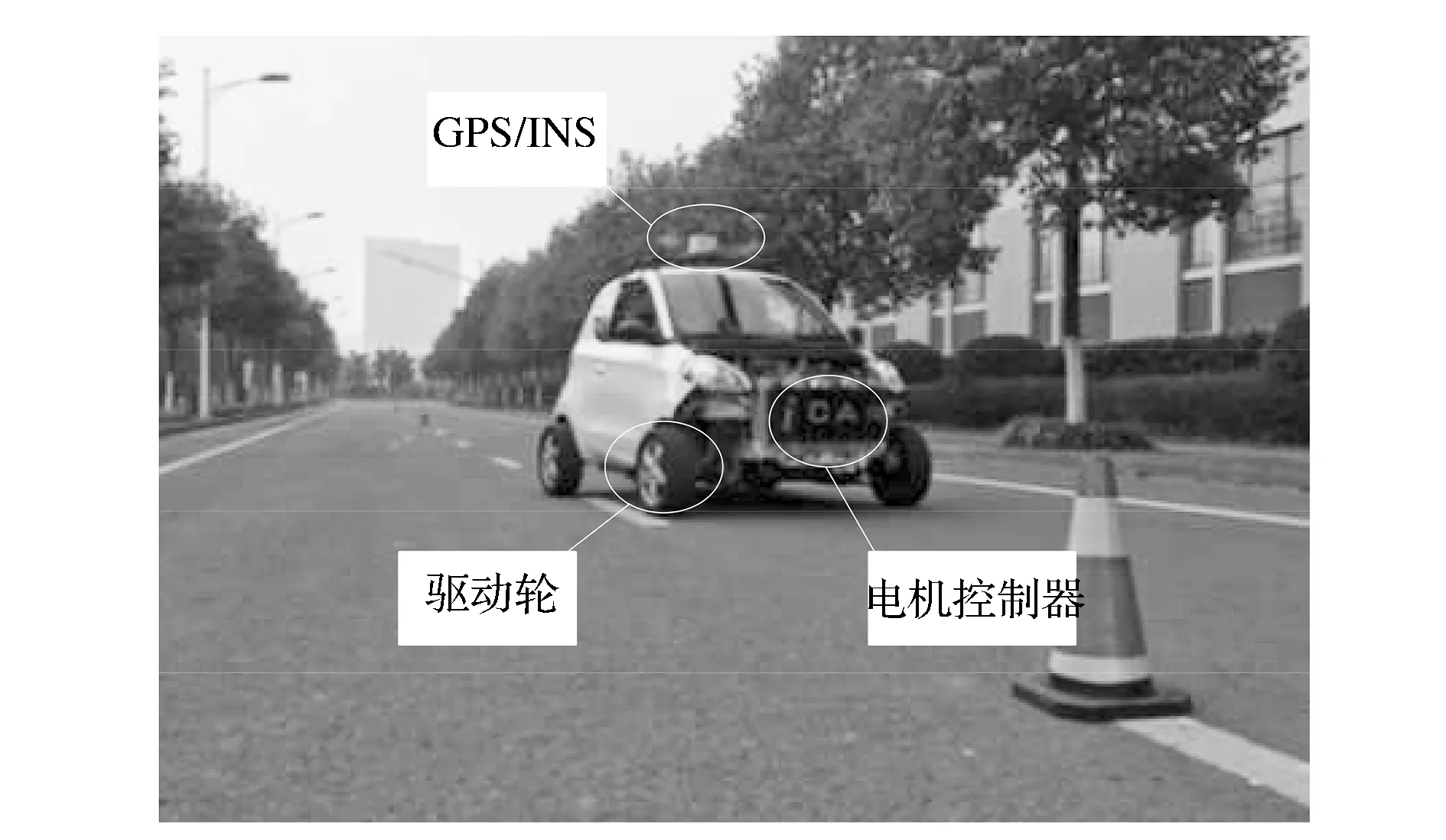
图17 实验样车
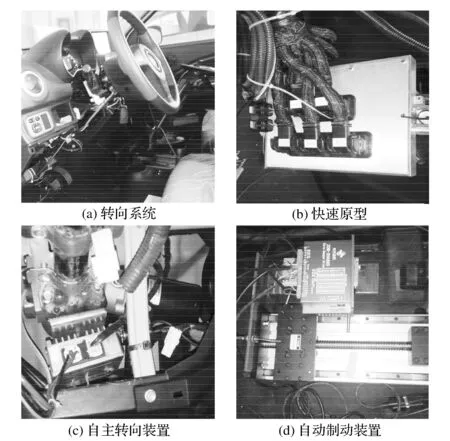
图18 实验样本
为分析协调控制下的轨迹跟踪特性,分别进行了车速10km/h时定轨迹行驶下的自主转向和协调控制轨迹跟踪实验,图19~图22分别为轨迹跟踪时车辆的行驶轨迹、横摆角、转向角和横摆角速度。由图19可见,在协调控制下车辆能更好地跟踪采集的参考路径,由于协调控制下增加了参考横摆角的控制目标。由图20可见,协调控制下横摆角更接近参考横摆角。与自主转向轨迹跟踪相比,车辆转向角减小,但由于左右轮力矩差较大,使得轨迹跟踪时的横摆角速度增加,但并没有产生较恶劣的影响。综上可见,通过对自主转向和差动转向进行协调控制,实现了对跟踪参考轨迹和参考横摆角两种控制目标的优化,通过协调控制能够改善无人车转向的响应速度和灵活性,提高了轨迹跟踪的准确性和可靠性。
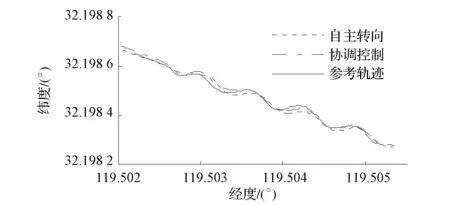
图19 行驶轨迹
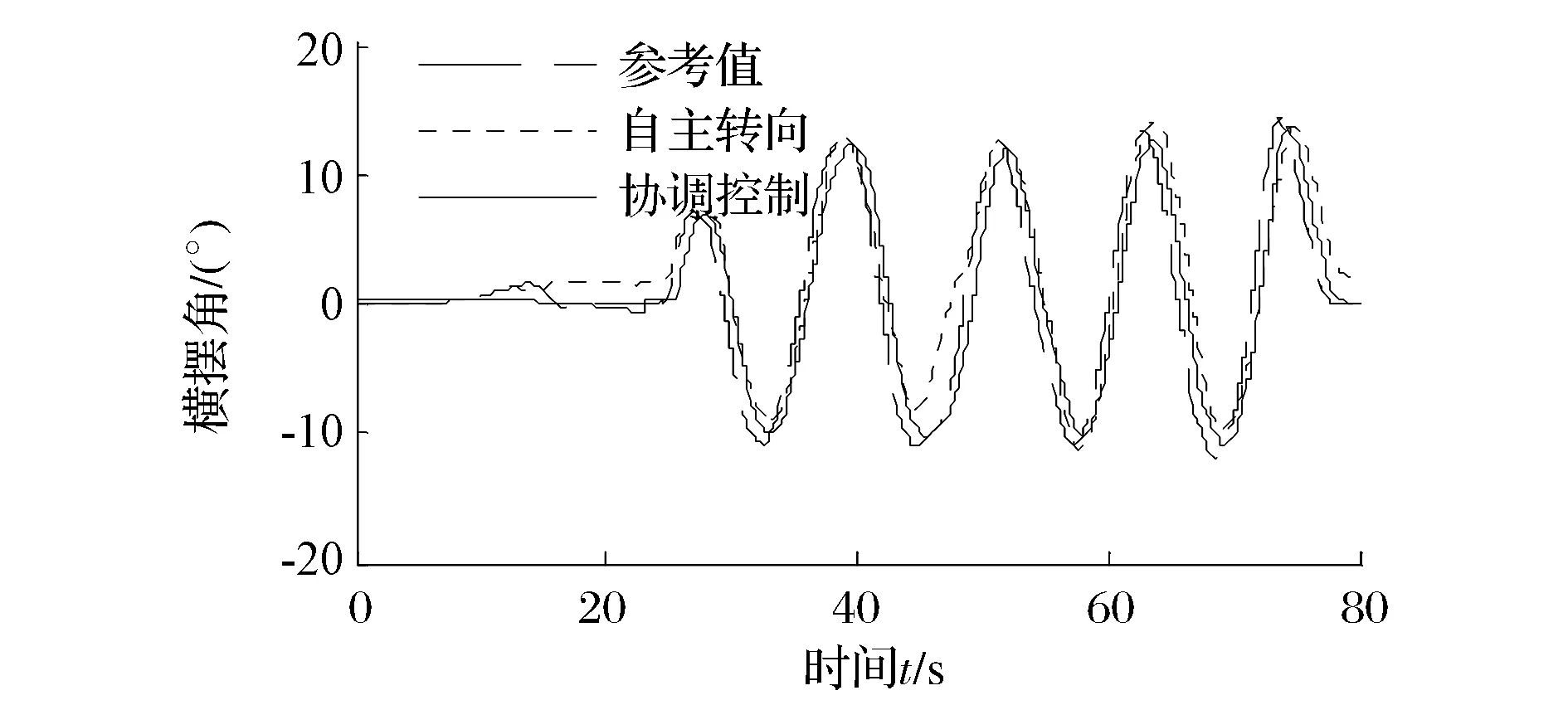
图20 横摆角
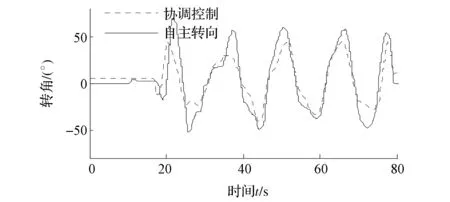
图21 车辆转向角
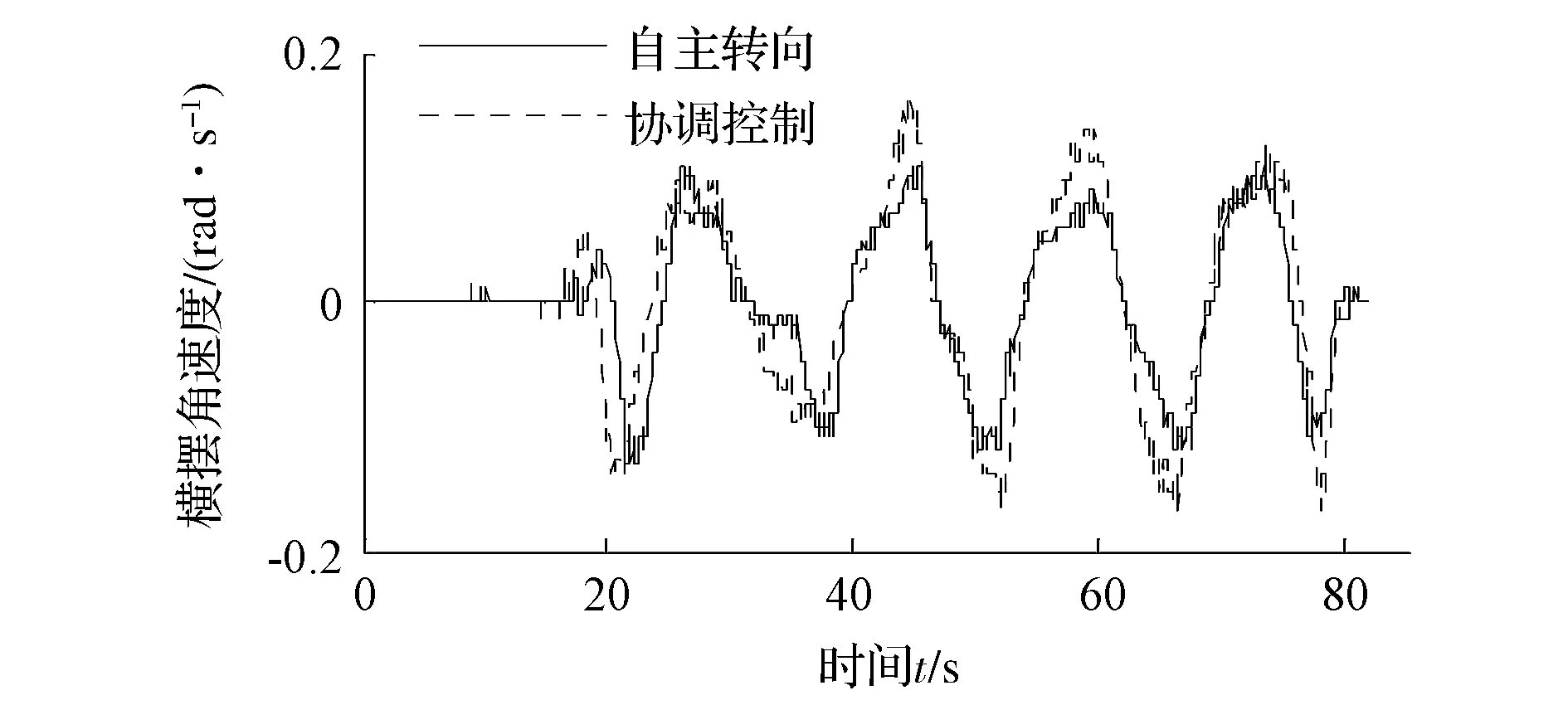
图22 横摆角速度
5 结论
(1)基于模型预测控制算法,提出预瞄时间自适应的轨迹跟踪方法,可使分布式驱动无人车在自主转向轨迹跟踪时能满足转弯和直行工况的行驶要求。
(2)通过对左右轮鼓电机转矩的分配控制,进行基于差动的主动转向,使无人车跟踪参考横摆角,可实现差动转向的轨迹跟踪。
(3)利用设计权重系数的方法,对自主转向输出的转向角和差动转向输出的左右轮鼓转矩进行重新分配控制,实现协调控制轨迹跟踪;通过协调控制能改善转向的响应速度和灵活性,提高无人车轨迹跟踪能力。本文中未考虑车速对转向速度的影响,因此实验时只能设置较低车速,下一步将依据不同行驶速度进行转向转速控制以适应各种车速,提高系统的鲁棒性。
参考文献
[1]SATO M,YAMAOTOG,GUJD.Development of wireless in-wheel motor using magnetic resonance coupling[J].IEEE Transactions on Power Electronics, 2015, 31(7): 5270-5278.
[2]李仲兴,王吴杰,徐兴,等.四轮独立驱动电动汽车能效分析与功率分配[J].汽车工程,2016,38(9):1037-1043.
[3]王庆年,王军年,宋世欣,等.差动助力转向系统离线仿真验证[J].汽车工程,2009,31(6):545-551.
[4]PÉREZJ, MILANÉSV, ONIEVA E.Cascade architecture for lateral control in autonomous ground vehicles[J].IEEE Transactions on Power Electronics,2011,1(12) :73-82.
[5]RASTELLIA JP,PEÑASB M S.Fuzzy logic steering control of autonomous vehicles inside roundabouts[J].Applied Soft Computing, 2015(35): 662-669.
[6]PÉREZ J,GAJATE A, MILANESV, et al.Design and implementation of a neuro-fuzzy system for longitudinal control of autonomous vehicles[C].IEEE World Congress on Computational Intelligence WCCI(2010):1-5.
[7]HUChuan,JINGHui, WANG Rongrong, et al.Robust H∞ outputfeedback control for path following of autonomous ground vehicles[J].Mechanical Systems and Signal Processing, 2016, 70(71): 414-427.
[8]FALCONCP, BORRCLLI F, ASGARI J, et al.Predictive active steering control for autonomous vehicle systems[J].IEEE Transactions on Control Systems Technology, 2007, 15(3):566-580.
[9]FALCONE P, TSENG H E,BORRELLI Francesco, et al.MPC-based yaw and lateral stabilisation via active front steering and braking[J].Vehicle System Dynamics, 2008(46): 611-628.
[10]李红志,李亮,宋健,等.预瞄时间自适应的最优预瞄驾驶员模型[J].机械工程学报,2010,46(20):106-111.
[11]熊璐,黄少帅,陈远龙,等.轮式差动转向无人车运动跟踪控制的研究[J].汽车工程,2015,37(10):1109-1116.
[12]杨远航,方庆馆.四轮驱动车鲁棒轨迹跟踪控制器设计[J].吉林大学学报(工学版),2011,41(2):301-305.
[13]WANG R R, HU C, YAN F J, et al.Composite nonlinear feedback control for path following of four-wheel independently actuated autonomous ground vehicles[J].IEEE Transactions on Control Systems Technology, 2016, 17(7): 2063-2074.
[14]GONG Jianwei, XU Wei, JIANG Yan, et al.Multi-constrained model predictive control for autonomous ground vehicle trajectory tracking[J].Journal of Beijimg Institute of Technology, 2015, 24(4):441-448.
[15]孙银健.基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D].北京:北京理工大学,2015.
