多关节新型机械臂设计及其坐标反馈系统研究
2018-05-21任立敏杨忠良谭益松
任立敏,杨忠良,谭益松
(1.东北电力大学 机械工程学院,吉林 吉林132012;2.中国铁路总公司,北京100844)
机械臂在国防、军事、工业、航空航天等领域发挥了巨大的作用,逐步代替了人类从事危险、重复、繁重的劳动,对整个社会文明的发展起到了极大的推动作用,广大学者分别从不同的角度对机械臂展开了相关研究.
巧妙合理的结构设计是机械臂研究的重点.刘艳华[1]设计了汽车后桥壳数控焊接机械臂的机械结构,根据焊接的工艺特点,设计了焊接机械臂控制的硬件结构和软件系统.赵凯[2]在分析微创手术机械臂构型的基础上,提出了采用中空走线的被动关节及新型的远心机构的机械臂设计方案.在此基础上,开展了腹腔微创手术机械臂被动关节及远心机构的机械结构设计,并基于D-H法进行运动分析.吕晓军[3]对空间机械臂一体化关节的设计和控制展开了研究,指出了内部中心孔走线的机械臂设计方法.程晓鼎[4]设计了一种用于可变形模特机器人的机械臂,它可以改变手臂长度,做一些典型的试衣动作,增强了模特机器人的试衣效果;文中介绍了机械臂的设计依据以及最终结构,运用D-H法建立了机械臂的运动学方程.李世其[5]设计了一种两自由度机械臂运动模块,并根据此模块研制了一台六自由度空间机械臂;为确定机械臂在工作过程中的强度和稳定性,建立了机械臂的有限元模型,分析了其工作态的应力情况和动态特性.赵亮亮[6]从危险作业机器人的任务需求出发,创新设计了一种带有平移自由度的六自由度机械臂,建立了机械臂的虚拟样机模型,运用D-H法建立机器人的连杆坐标系,进行了正向运动学分析,推导出机械臂的运动学方程以及手爪坐标系相对于基坐标系的位姿矩阵.
机械臂的控制性能直接决定了机械臂的工作性能,在这一方面学术界展开了广泛的研究[7~12].陈朝大[7]针对具有危险的特种环境,设计一个可以代替人工作业的排爆机器人控制系统.该系统以DSP为中央处理核心,用6个伺服电机配合铝制合金搭建机械臂硬件结构,利用DSP增强型PWM模块驱动伺服电机,上位机采用PC机进行控制实现了串口测试软件向SCI模块发送指令的功能,从而控制机械臂,模仿人手的各类运动.姜振廷[8]、李健[9]、陈涛[10]利用有限元分析软件,对机械臂的结构进行分析,获得机械臂的结构性能参数,从而为机械臂控制策略的制定提供依据.高文斌[11]对一种可重构模块化机器人系统进行定位精度标定方法研究.采用装配映射矩阵描述任意给定的模块化机械臂组成模块间的装配关系,并根据装配信息自动生成指数积形式的运动学模型.孟祥萍[12]针对移动机器人在旋转角度控制时,普通PID控制器存在超调、波动和普通积分分离式PID存在响应速度慢的问题,并提出了改进型积分分离式PID控制算法.
本文设计了一种可用于科学研究、教学演示等场合的多关节新型机械臂,并对其控制系统展开研究,同时设计了机械臂的坐标反馈系统.
1 多关节新型机械臂机械系统
多关节新型机械臂机械系统的设计主要分为两个部分:结构设计和D-H坐标变换分析.其中,结构设计主要目的是对机械臂的机械本体进行虚拟仿真研究,并对其关键零部件进行设计,实现机械臂的机械运动;D-H坐标变换主要完成机械臂的数学建模,获得末端运动点的空间三维坐标.
1.1 机械臂结构设计
机械臂机械系统的设计需要满足结构紧凑、质量轻,并且在自身结构上解耦等一系列要求.在上述设计准则的指导下,本文设计的多关节新型机械臂的结构如图1所示.
基关节采用低成本步进电机1作为动力源,直接驱动整个机械臂旋转.步进电机体积小,质量轻,控制简单,较为适合在小型机械臂上运用.同时采用轻型薄壁轴承2支撑,轻型薄壁轴承承载能力大、结构紧凑,是近年来在结构设计领域广泛采用的一种轴承.薄壁轴承内部具有较大的中心孔,在基关节内部设计有走线槽3,走线槽直接穿过薄壁轴承内部中心孔,机械臂的驱动线路和控制线路从薄壁轴承内部中心孔通过,这在保证机械臂安全运行的同时,又保证了整机外形的轻巧美观.第一俯仰关节采用步进电机4直接驱动.受安装体积等因素的影响,第二俯仰关节无法通过步进电机直接驱动,本文设计了步进电机+同步带的传动方式:步进电机5通过同步带6和同步带轮7将动力传递给第二俯仰关节,相比于传统的V带传动,同步带传动具有传动比准确的优点,可以保证机械臂第二俯仰关节的传动精度.末端球关节点采用重力锤原理自动布置.
1.2 机械臂D-H坐标变换
为了获得机械臂末端球点的空间坐标,需要建立机械臂的D-H坐标模型.本文建立的多关节机械臂的D-H坐标模型,如图2所示.
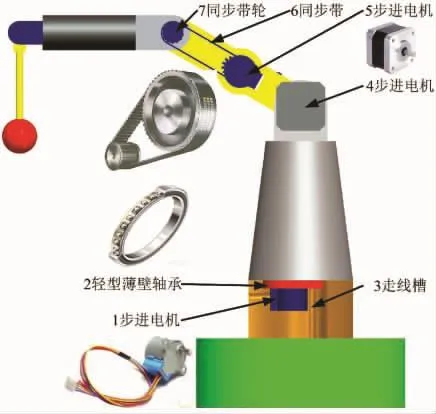
图1 多关节机械臂虚拟样机

表1 空间坐标测定D-H参数
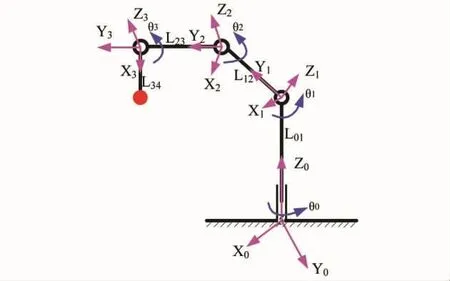
图2 多关节机械臂D-H坐标模型
X0Y0Z0表示基坐标系,θ0表示基关节的旋转角度,L01代表基关节到第一俯仰关节的距离.空间坐标仪D-H参数,如表1所示.
由基坐标系X0Y0Z0到第一俯仰关节坐标系X1Y1Z1的坐标变换可以由公式(1)表示:

由第一俯仰关节坐标系X1Y1Z1到第二俯仰关节坐标系X2Y2Z2的坐标变换可以由公式(2)表示:

由第二俯仰关节坐标系X2Y2Z2到末端关节坐标系X3Y3Z3的坐标变换可以由公式(3)表示:

末端关节坐标系X3Y3Z3到末端测量点的坐标变换可以由公式(4)表示:

机械臂的D-H坐标变换Ttotal可以由公式(5)获得:

通过公式(5)可以获得机械臂末端点的空间坐标为

在机械臂各个关节转动的过程中,可通过公式(6)实时获得机械臂末端点坐标.
2 机械臂电气控制系统
2.1 机械臂电气系统设计
本文设计的多关节机械臂控制系统采用了AT-89C51单片机作为核心控制单元,该款单片机具有功耗低、运算速度快、可在线编程、调试简单等一系列优点,是较为理想的主控芯片,电气控制系统结构框图,如图3所示.
基关节步进电机和第二俯仰关节步进电机采用基于ULN2803的专用步进电机驱动器,一个驱动器可以驱动两路5线制输入步进电机,减小了系统的体积;第一俯仰关节步进电机的输出力矩较大,输入电流较高,因而需要选择驱动功率较大的步进电机驱动器.本文选择了基于Toshiba TB6560的专用步进电机驱动器,最大驱动电流可以达到3.5 A,可以满足第一俯仰关节对驱动力矩的要求.
2.2 机械臂控制系统设计
机械臂的坐标反馈系统要求能够实时对机械臂末端的位置进行反馈,并且需要将末端点的坐标显示在1602液晶显示屏上,本文设计的机械臂的坐标反馈系统的控制流程如图4所示.
文中所采用的AT89C51单片机的机器周期为1us,相对于机械臂的机械运动周期,计算速度足够快,因而机械臂主控系统采用循环扫描方式,在每个扫描周期检测机械臂状态的变化,在每个扫描周期结束时更新液晶显示屏输出,实现了机械臂末端点空间位置实时变化的要求.
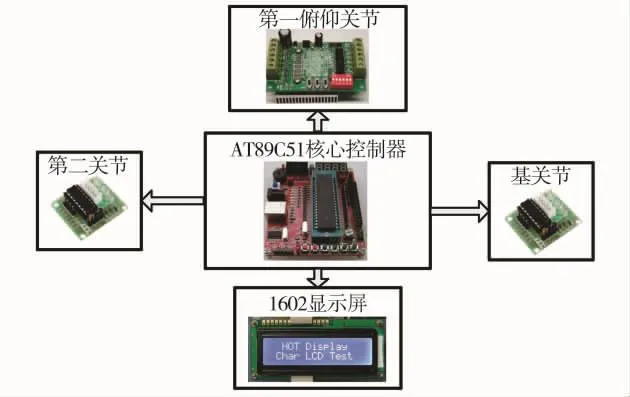
图3 多关节机械臂电气控制系统框图
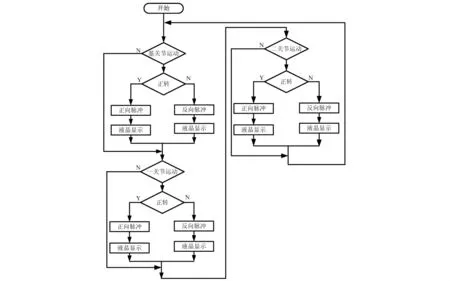
图4 多关节机械臂控制系统流程图
3 实验研究
文中研制的多关节机械臂样机及其坐标反馈系统实物图,如图5所示.本文最终在该多关节机械臂实物样机上分别进行了多组控制性能实验和坐标反馈实验.
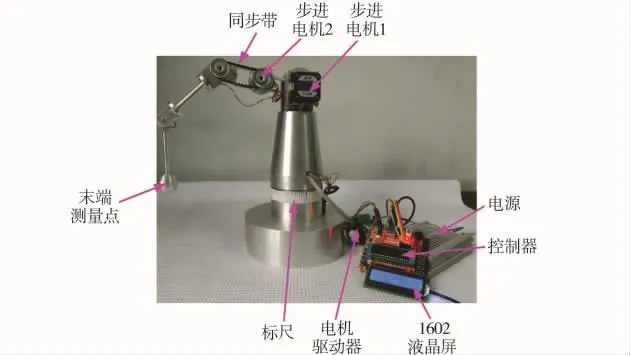
图5 多关节新型机械臂样机实物图
为验证机械臂工作性能,分别进行了机械臂各个关节的正反转、加减速等实验.在坐标反馈系统实验中,通过设定若干个关键测量点,控制多关节机械臂的运动达到关键测量点,将坐标反馈系统的输出与外界绝对测量坐标进行对比,以验证坐标反馈系统的性能,多次实验结果表明本文研制的多关节机械臂坐标反馈系统可以实时地获得并准确显示机械臂末端点的位置信息,其中一组实验的具体实验过程如图6所示.
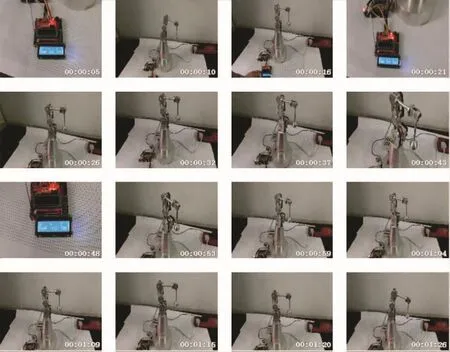
图6 多关节新型机械臂样机实验过程
从以上实验过程可以看出:本文设计的多关节新型机械臂的本体结构设计合理,运动能够满足预期设计要求;电气控制系统工作稳定,空间坐标反馈系统能够实时反映出末端测量点的位置变化,并且能够在液晶显示屏上输出空间坐标及其变化过程,整机性能完全满足设计要求.
4 结 论
通过对上述多关节新型机械臂的研制过程及其实验结果,可得如下结论:
(1)设计了一种多关节新型机械臂及其坐标反馈系统,坐标反馈系统能够实时反映机械臂末端的坐标变化,可以满足该机械臂在科学研究、教学演示等多场合的任务要求;
(2)采用步进电机作为多关节机械臂的动力源,具有控制简单、成本低的优点;
(3)应用轻型薄壁轴承支撑整个机械臂,能够实现中心走线,增强整个设计的美观性;
(4)采用51单片机+专用步进电机驱动器结合的电气控制系统,控制系统简单、可靠.
参考文献
[1] 刘艳华,何高清.数控焊接机械臂设计及控制[J].安徽职业技术学院学报,2012,11(4):4-6.
[2] 赵凯,付宜利,牛国君,等.腹腔微创手术机器人的结构设计与尺寸优化[J].华中科技大学学报:自然科学版,2013,41(1):324-328.
[3] 吕晓军.空间机械臂机电一体化关节的设计及控制[J].现代制造技术与装备,2016(11):29-31.
[4] 程晓鼎,南琳.模特机器人的机械臂设计及运动学仿真[J].机械设计与制造,2013(11):193-196.
[5] 李世其,刘洋,朱文革.多关节轻型机械臂的设计研究[J].航天器工程,2009,18(3):48-52.
[6] 赵亮亮,马振书,穆希辉,等.危险作业机器人机械臂设计及其运动学分析[J].机械设计与制造,2012(8):155-157.
[7] 陈朝大,杜启亮,秦传波,等.基于 DSP平台的排爆机械臂控制系统设计[J].机床与液压,2014,42(3):58-61.
[8] 姜振廷,郑忠才,董旭.基于 ANSYSWORKBENCH的六自由度机械臂有限元分析及结构优化[J].制造业自动化,2014,36(1):109-123.
[9] 李健,姜振廷,董旭.基于 ANSYSWORKBENCH的带电作业机械臂模态分析及振动控制[J].制造业自动化,2014,36(1):48-65.
[10]陈涛.基于ANSYS的挖掘机械臂设计及有限元分析[J].装备制造技术,2011(1):69-70.
[11]高文斌,王洪光,姜勇,等.一种模块化机器人的标定方法研究[J].机械工程学报,2014,50(3):33-40.
[12]孟祥萍,寇磊,苑全德,等.基于改进型积分分离式PID的机器人运动控制[J].东北电力大学学报,2016,36(5):86-91.
