永磁同步电机扩展滑模观测器设计
2018-05-21文新宇
孟 贺,文新宇
(太原科技大学电子信息工程学院,太原030024)
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)由于自身高能量密度、高可靠性、方便控制等优点,目前已广泛的应用到工业现场、机器人控制、电动汽车等场合。基于转子磁场定向的矢量控制实现了交流电机的内部解耦,使其类似于直流电机的转矩控制方式。目前已经广泛的应用于PMSM控制系统当中。获取精确的转子磁极位置和转速是实现高性能PMSM驱动系统的重要环节,目前传统的获取方法是采用光电编码盘和旋转变压器等机械传感器来测量角度及转速。采用这类设备可以准确获取转子位置信息,是目前电机控制系统的首选。但是安装这类传感器会提高安装及维护的成本,而且在一些比较极端恶劣条件下,传感器的可靠性会受到很大的影响,从而限制了其应用场合。因此,无传感器技术[1]的永磁同步电机驱动系统,目前已成为电机驱动领域的一个新的发展方向并在某些场合得到使用。
滑模观测器观测法[2-4]由于对参数摄动的灵敏度低,具有强鲁棒性,方便软硬件实现的特点,已经在永磁同步电机中得到广泛的应用。由于系统中存在未建模动态,系统惯性等不确定非线性因素的存在,系统状态最终不能稳定于滑模面上,而是在滑模面附近做无限穿越运动,这就是基于Bang-Bang控制的滑模变结构控制本身存在的抖振现象。
国内外学者为了克服滑模控制中抖振现象做了大量工作,并取得了许多成果。目前常用的方法是:切换函数连续法和滤波法。第一种方法是采用饱和函数或sigmod函数来代替开关函数,通过边界层内的连续控制来替代Bang-Bang控制,来达到减少抖振的目的。这类处理方法有一定的效果,但由于边界层是固定且不可变的,系统误差无法完全消除。第二种方法,是采用低通滤波器对观测信号进行处理,但由于低通滤波器的物理特性,其会造成相位滞后和幅值衰减的问题。近年来,有学者提出的变截止频率[5]和基于卡尔曼滤波的低通滤波器[6],针对相位滞后进行补偿并取得很好的效果。近年来,有学者在高为炳教授提出的趋近律的基础上设计了改进的变指数趋近律[7-8],通过将趋近律连续化来抑制抖振,取得了良好的效果。通常情况下,滑模增益需要设计的很大,以保证系统鲁棒性的要求。然而,滑模增益变大会导致抖振增强。文献[9]利用干扰观测器来补偿系统的外部干扰及内部参数扰动,减少了滑模增益,同时减少抖振。
本文在传统滑模观测器的基础上,研究一种以反电动势信息作为扩展变量的扩展滑模观测器。根据李雅普诺夫稳定性定理设计一种简化的参数设计方法,并着重分析了反馈增益与抖振抑制之间的关系。相比于传统的滑模观测器,这种方法能够有效的抑制抖振,从根本上避免了采用低通滤波器提取反电动势信息带来的幅值衰减和相位延迟问题。同时,采用一种新型切换函数[10],减少了稳态误差的同时进一步抑制抖振现象。通过理论分析和仿真验证所设计的观测器具有良好的观测性能。
1 基于扩展滑模观测器的无传感器矢量空间控制策略
1.1 扩展滑模观测器设计
永磁同步电机在α-β坐标系下的数学模型为[11]:

式中,iα、iβ为两相静止坐标系下的电流值,uα、uβ为两相静止坐标系下的电压值。R、L分别为定子电阻、定子电感。ω、θ分别为电机转速、转子位置。将式(1)写成标准的状态方程形式:
上式中状态变量为X1= [ iαiβ]T,输入变量为U= [ uαuβ]T,输出变量为Y= [ iαiβ]T,b=[1/L 1/L]T.
由上式可知,f( X )中的不确定项ωcosθ,1ωsinθ中含有电机的转速和位置信息,将其作为扩展的状态变量,对其进行观测可得到电机的转速和位置信息。设新的状态变量为X2,则有:

记=W(t) ,W(t) 未知,且 W(t) < W0.f( X1)可以表示为以下形式:

结合(2)–(6),可得如下线性控制系统:
设计扩展滑模观测器如下:
上式,= []T为电流 [ iαiβ]T的观测值,为扩展变量X2的观测值。将式(8)减去式(7)后可得观测误差为:
g为滑模增益。ε1=-X1为定子电流观测误差,ε2=-X2为扩展变量观测误差。令状态变量X1与其估计值之差构成滑模面,则有:S=ε1=-X1.Usmo为切换信号,且Usmo=ηsign(S),η为切换增益且η<0.
为了减少由于切换函数的不连续控制引起的稳态误差和高频抖振现象,本文采用如下的切换函数:

e为误差,α1、σ为切换函数的参数。为了方便工程上的实现,通常选择α1=0.5,σ为边界层的宽度,决定了系统的误差范围。当σ≤0.0025时易激发高频脉动,而σ取值过大时,非线性反馈将无法工作。因此,在实际应用中,通常选择σ=0.01,可以同时满足控制系统的高效性和精确性的要求。
1.2 参数选取及稳定性分析:
为了分析上述滑模观测器的收敛性,构建李雅普诺夫方程:

对公式两边同时求导可得:
为了满足上述要求,参数η需满足:

依据参数η的选取范围,可以采用如下方法对参数η进行设计

式中,m为常量,通常选择m=2.当系统状态到达所设计滑模面时,满足下述方程:

代入误差状态方程式(9)中可以得到:

可将上式写成:

求解可得:

C为常量且当g>0时,系统误差ε2可收敛至零。而且g决定了误差的收敛速度。
1.3 抖振抑制特性分析:
抖振抑制是滑模观测器设计的重要环节,为了分析观测器中的高频抖振现象对观测器性能的影响,可将式(14)写为:

式中Z代表高频抖振现象对观测器的影响。将式(15)带入式(18)可得:

设H()s为误差ε2的传递函数,则:

可见,上式为针对误差ε2的惯性滤波器,且滤波器的截至频率由观测器的参数g决定。
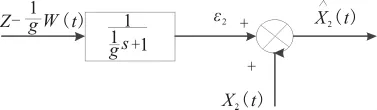
图1 抖振抑制结构图Fig.1 chattering suppression structure of the observer
2 转子位置和转速的计算
现有的转子位置计算方法常用=tan-1( eα/eβ)得到。这种方法计算精度不高而且容易引入新的干扰。本文采用软件锁相环(SPLL)结构来计算转子位置和速度。通过对输入信号eα,eβ计算,解调出转速和转子位置的估计值.

图2 SPLL原理框图Fig.2 Block diagram of the SPLL
对上图所示算法进行分析可得:
其中,为观测器得到的转子位置,k为反电动势系数为锁相环输出的转子位置。当角度误差满足< π/6时,sin(-)≈-. ,:此时 可简化为

由此可见,上述算法可简化为图(3)的锁相环结构。将观测器得到的转子位置与锁相环的输出相减后得到估计误差,将误差作为输入信号输入PI调节器,经PI调节器调整后得到转速的观测值,积分后得到转子位置信息。其中,kp、ki分别为比例积分调节器的比例系数和积分系数。

图3 锁相环结构图Fig.3 The soft phase-locked loop
3 仿真验证
建立基于Simulink的系统仿真模型,控制系统整体结构如图(4)所示。采用id=0控制策略,转速环和电流环分别采用PI调节器进行调节。采用扩展滑模观测器(ESMO)对反电动势进行观测,并采用软件锁相环结构(SPLL)解调出转子位置。
图(4)所示的控制系统中,电机参数为R=2.875 Ω ,L=Ld=Lq=8.5 mH ,J=4.4 ×10-4kg·m2,ψa=0.175 Wb,B=0.000 1 N·m·s,p=4,直流母线电压uc=310 V,额定转速1 500 r/min.
扩展滑模观测器的参数选取为:η=-150,g=500,α1=0.5,σ =0.01.
在仿真的过程中同时加入了传统的滑模观测器[6]作对比,两者采用相同的锁相环结构。图5为反电动势观测值的对比。图5(a)为传统滑模观测器的反电动势观测值。图5(b)为扩展滑模观测器的反电动势的观测值。可以看出,扩展滑模观测器能够有效的抑制抖振,获得更为精确的反电动势信息。
图6为调速仿真对比图,在0.1 s时,将转速由800 r/min突变为1 000 r/min.可以看出:传统滑模观测器转速观测值中转速波动较大,响应速度较慢,并不能很好的跟踪给定转速。而扩展滑模观测器能够有效的减少转速波动,观测精度更高。

图4 基于ESMO的永磁同步电机无传感器控制系统框图Fig.4 Overall sensorless PMSM simulation control block based on ESMO observers
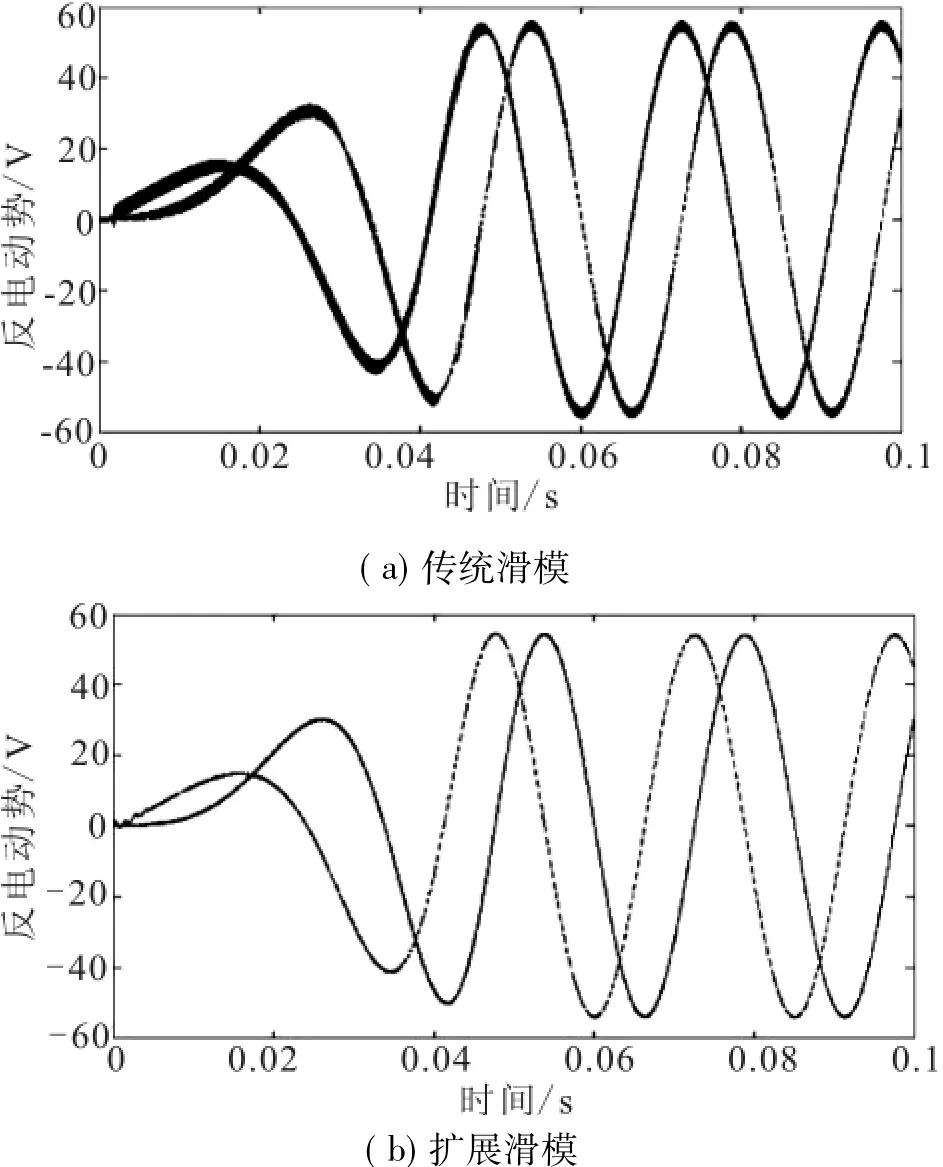
图5 反电动势观测结果Fig.5 The estimation of Back EMF
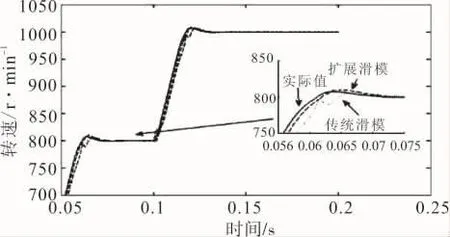
图6 传统观测器和扩展观测器转速仿真对比Fig.6 Comparison of rotor speed between tradition observers and extended observer
图7 为转子位置的观测值对比图;图8为转子位置观测误差对比图。可以看出,两者采用相同的锁相环结构,都可以准确的的跟踪转子位置。而且,相较于传统的滑模观测器,扩展滑模观测器的转子位置观测误差更小,观测精度更高。
图9为变负载仿真对比图,在0.2 s转速为1 000 r/min时,将负载转矩增加20 N·m.转速经短暂下降后重新回到给定值。从仿真图中可以看出:两者都能很好的跟踪给定转速。相较于传统滑模观测器,扩展滑模观测器转速波动更小,精度更高。

图7 传统观测器与扩展观测器转子位置观测对比Fig.7 Comparison of rotor position between tradition observers and extended observer
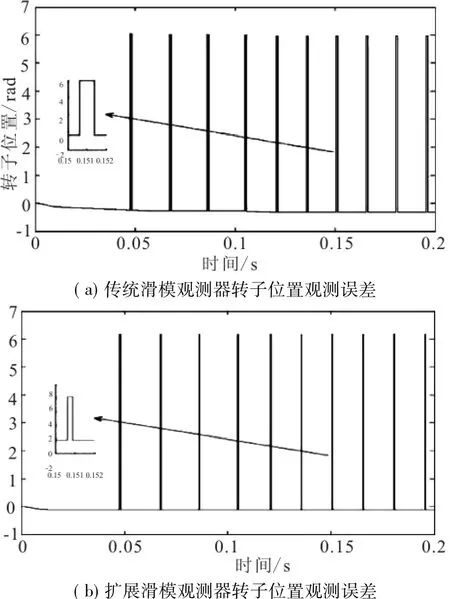
图8 传统观测器与的扩展观测器转子位置观测误差对比Fig.8 Comparison of rotor position error between tradition observers and extended observes
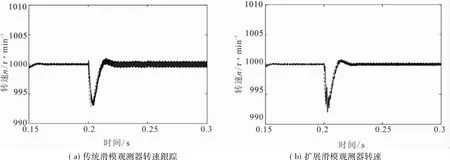
图9 传统观测器与采用扩展观测器转速对比Fig.9 Comparison of rotor speed between tradition observers and extended observer
4 总结
为了提高永磁同步电机无位置传感器控制系统的转子位置估算精度,本文基于传统的反电动势滑模观测器,研究一种扩展滑模观测器。根据李雅普诺夫稳定性定理设计了一种简化的滑模系数的设计方法,并着重分析了系统的抖振现象与反馈增益选择之间的关系。相比于传统的滑模观测器,这种方法能够有效的抑制抖振,从根本上避免了采用低通滤波器提取反电动势信息带来的幅值衰减和相位延迟问题。采用新型切换函数,减少了稳态误差同时进一步抑制了抖振现象。最后,仿真结果表明所设计的扩展滑模反电动势观测器具有良好的观测性能。
参考文献:
[1] CONSOLI A,SCARCELLA G,TESTA A.Industry application of zero-speed sensorless control techniques for PM synchronous motors[J].IEEE Transactions on Industry Applications,2001,37(2):513-521.
[2] ZHAO Y,WEI C,ZHANG Z.A Review on Position/Speed Sensorless Control for Permanent-Magnet Synchronous Machine-Based Wind Energy Conversion Systems[J].Emerging & Selected Topics in Power Electronics IEEE Journal of,2013,1(4):203-216.
[3] LEE H,LEE J.Design of Iterative Sliding Mode Observer for Sensorless PMSM Control[J].IEEE Transactions on Control Systems Technology,2013,21(4):1394-1399.
[4] LIU J,WANG G,Yu J S.A study of SMO buffeting eli mination in sensorless control of PMSM[C]//Intelligent Control and Automation.IEEE,2010:4948-4952.
[5] 鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010,30(33):78-83.
[6] KANG K L,KIM J M,HWANG K B,et al.Sensor-less Control of PMSM in high speed range with iterative sliding mode observer[C]//Applied Power Electronics Conference and Exposition,2004.Apec'04.Nineteenth IEEE.2004:1111-1116.
[7] 毛亮亮,周凯,王旭东.永磁同步电机变指数趋近律滑模控制[J].电机与控制学报,2016,20(4):106-111
[8] ZHANG X,SUN L,ZHAO K,et al.Nonlinear Speed Control for PMSM System Using Sliding-Mode Control and Disturbance Compensation Techniques[J].IEEE Transactions on Power Electronics,2013,28(28):1358-1365.
[9] GIRJIA P K,Prince A.Robustness evaluation of SMO based speed-position estimation in BLDC motor[C]//International Conference on Advances in Electrical Engineering.IEEE,2014:1-4.
[10] XU Y T,WANG Z H,ZHAO H L.Position sensorless control of PMSM based on Extended State Observer[C]//International Computer Conference on Wavelet Active Media Technology and Information Processing.2015:369-373.
[11] CIAATTON L,CORRADINI M L,GRISOSTOMI M,et al.Variable Structure Sensorless Control of PMSM Drives[M]//Advances and Applications in Nonlinear Control Systems,Springer International Publishing,2016.