先进控制模型在线自适应辨识系统的建设与应用
2018-05-18刘巍
刘 巍
(中国石化上海石油化工股份有限公司,上海200540)
近20年来,先进控制软件及其实施技术快速成熟,在炼油、石化等领域大规模推广应用,取得了良好的应用效果。先进控制系统成规模的投用为企业带来可观效益的同时,也伴随着应用风险。随着先进控制系统运行时间的延长,装置技术、工艺条件、经济性能指标也在逐渐改变,导致先进控制模型与实际工况的匹配度逐渐下降、控制性能降低,最终导致先进控制系统失效。这时需要及时调整先进控制模型以适应新的工况,保持控制效果。
维护先进控制模型的传统方法是通过人工现场收集数据、辨识和修改模型等,实施难度大且易影响装置稳定运行,控制模型精确修改困难,易使控制器不稳定、性能衰减,出现投用率降低、维护费用递增等问题。基于Aspen ONE组件开发的在线自适应辨识系统,将控制模型维护从传统方法转变为自动连续的工作流程,即自动装置测试,自动评估与诊断控制器性能,自动进行模型辨识、校正与新模型更新,能够发现随工艺工况变化的控制模型偏差并自动校准,维持控制器峰值性能并运行于代表实际工艺工况的最优状态,有效规避先进控制系统维护和应用风险,保持其持续的高投用率和经济效益。
1 自适应辨识系统分析
先进控制系统利用模型预测功能,采用多变量控制手段实现工艺控制目标,提高装置操作平稳性;利用线性规划功能,将操作点推向最优点,在满足所有质量和安全约束条件的前提下实现卡边操作,达到提高产能、产品收率和降低能耗等目的。当生产工艺、催化剂、经济性能指标等工况发生变化时,先进控制模型需要及时调整与更新。在线自适应辨识系统在确保Aspen DMCplus多变量控制器工艺过程稳定的前提下,通过操纵变量MV小幅度阶梯状变化来实现装置自动阶跃测试,进而实现先进控制模型自动校正以匹配新工况,保持先进控制系统持续的平稳性和高投用率。
1.1 自适应辨识基本算法
在线自适应辨识系统基本算法示意如图1所示,在线自适应辨识系统按照自定义的校准比例因子(CR),对应于相应的最优稳态目标函数松弛“等高线或等高剖面”区域,亦即操纵变量在“校准模式”下的小幅度阶梯状变化的“测试”区域(图1灰色三角形区域),其特色在于具备先进控制引擎,同时计算传统意义下DMCplus稳态线性规划优化目标函数以及操纵变量稳态目标最小变化模式下(只考虑工艺约束控制,不考虑经济性指标)的目标函数;通过比较两个目标函数,实现新颖的切换控制算法。在每一个先进控制运行周期,DMCplus校准模式切换控制算法可归纳为:
(1)若ΔJ=Jo-Jc>ΔJt,Jo为目标函数最优值,Jc为目标函数当前值,ΔJt=CR×Jo(CR取值0~1,下同),即当前值在灰色三角形区域外(如图1),则执行DMCplus常规控制模式,跟踪CV稳态优化目标值,通过DMCplus动态控制,向新的最优稳态优化目标值逼近;
(2)若ΔJ=Jo-Jc≤ΔJt,即当前值在灰色三角形区域內,则执行在线自适应辨识模式,产生在满足相应工艺及目标函数约束条件下的自动测试信号,即多重操纵变量MV在自适应辨识模式下小幅阶跃测试。
如图1所示,CV1和CV2为两个工艺约束变量,MV1和MV2为两个操纵变量,设定校准比例因子CR为0.1,对应于CR为0.1的额外经济性指标目标函数约束条件为0.9×Jo(等高线),校准模式技术能确保把工艺推至灰色三角形区域内,即ΔJ小于10%Jo。
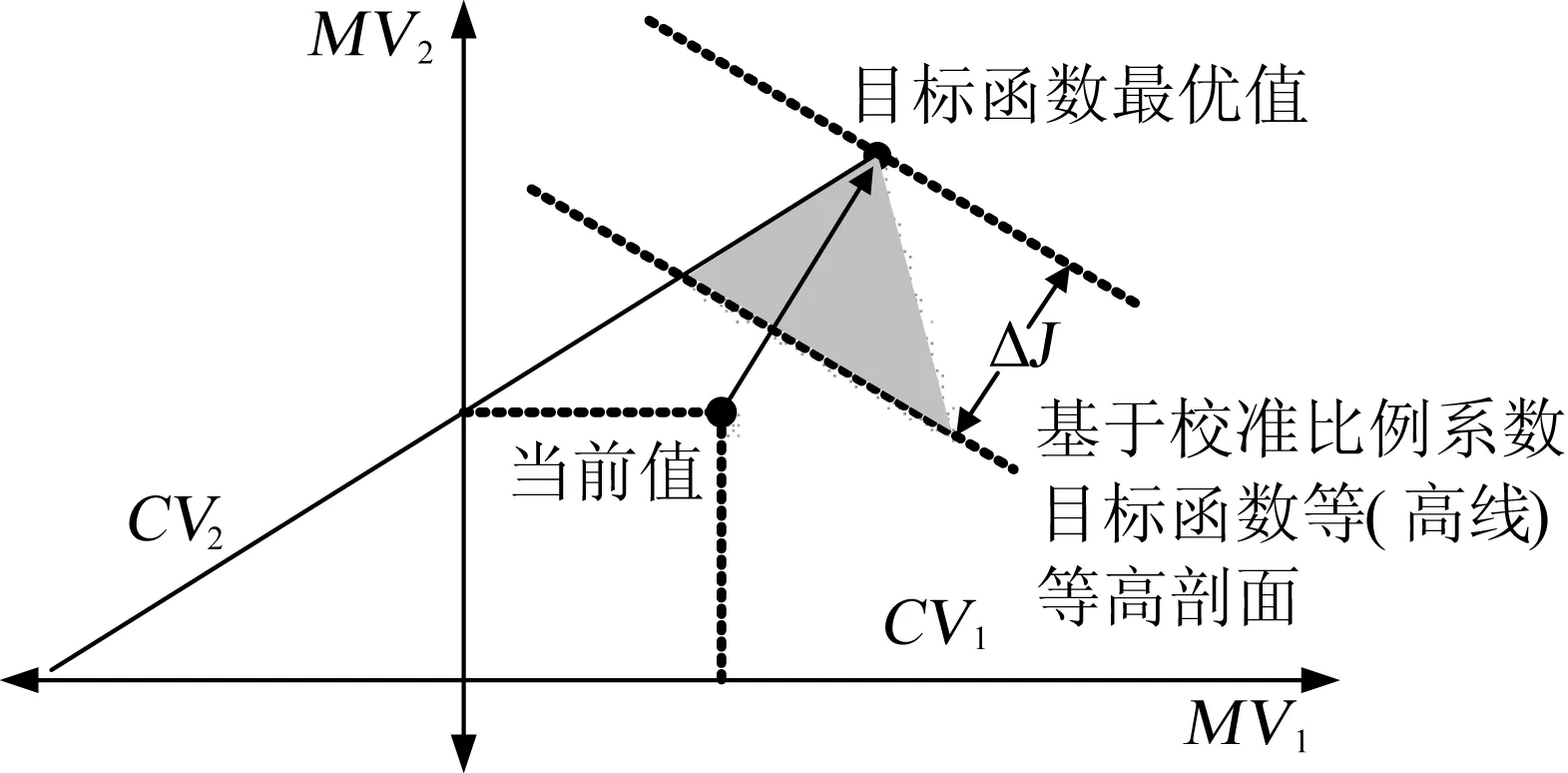
图1 在线自适应辨识系统基本算法示意
1.2 自适应辨识过程设计
基于上述基本算法,自适应辨识系统模型辨识过程如下:
(1)非干扰性后台自动装置测试,生成优质过程数据,提高模型精度,系统自动进行操作变量的小幅阶跃变化,以获取优质的测试过程数据,用于模型辨识与修正;
(2)自动识别坏数据并剔除,系统在后台进行自动装置测试时,可智能识别采集到的过程数据,并自动剔除坏数据;
(3)自动化改进控制模型,运用系统内置的先进控制模型性能KPI指标,持续跟踪监控先进控制器所有模型的性能,检测与诊断其性能变化;
(4)控制模型评估,运用系统所具有的诊断规则,对控制器进行在线检测,并根据诊断结果,分析出先进控制性能下降的原因,评估控制器的性能表现与存在的问题;
(5)自动产生新的候选模型,依据自动装置测试采集到的优质过程数据,自动辨识模型并产生候选模型供评选;
(6)建立模型评估规则,数据清理自动化以减少手动,评估并改进模型,自动生成新模型。
2 自适应辨识系统设计
自适应辨识系统基于Aspen Watch、DMCplus、SmartStep这3个组件开发。
Aspen Watch是先进控制器性能监测软件,可从先进控制器中有效提取需用信息,通过性能监测、诊断和维护建议等来保持先进控制系统与实际工况的匹配。
Aspen DMCplus是先进控制软件,它将整个生产装置或者某几个工艺单元作为一个整体研究对象,通过量化描述各变量之间的相互关系,建立过程多变量控制器模型。利用该模型提高装置运行的平稳性和增加目的产品产率、降低消耗等。
Aspen Smartstep是Aspen DMCplus中的一个测试程序。为了在短时间内获得更多的模型数据,程序可以同时对多个操作变量进行阶跃测试。此外,测试信号由多个主阶跃和一系列低中高频阶跃信号叠加而成,可以提供足够多的低中高频率阶跃数据。相比于手动测试,它能更快地生成更好的控制模型。
2.1 系统架构
自适应辨识系统由5个部分共同组成:即先进控制器、先进控制器性能监控、自动阶跃测试、闭环模型辨识和模型质量分析。先进控制系统通过分布式控制系统(DCS)与现场装置进行数据交互,通过性能监控找到控制器性能下降的主要原因并快速评估问题,然后使用自动阶跃测试快速生成优质的测试数据,进行闭环模型辨识及模型分析以改进模型和提高模型精度,最后自动生成新模型以更新原先进控制模型。系统基本架构如图2所示。
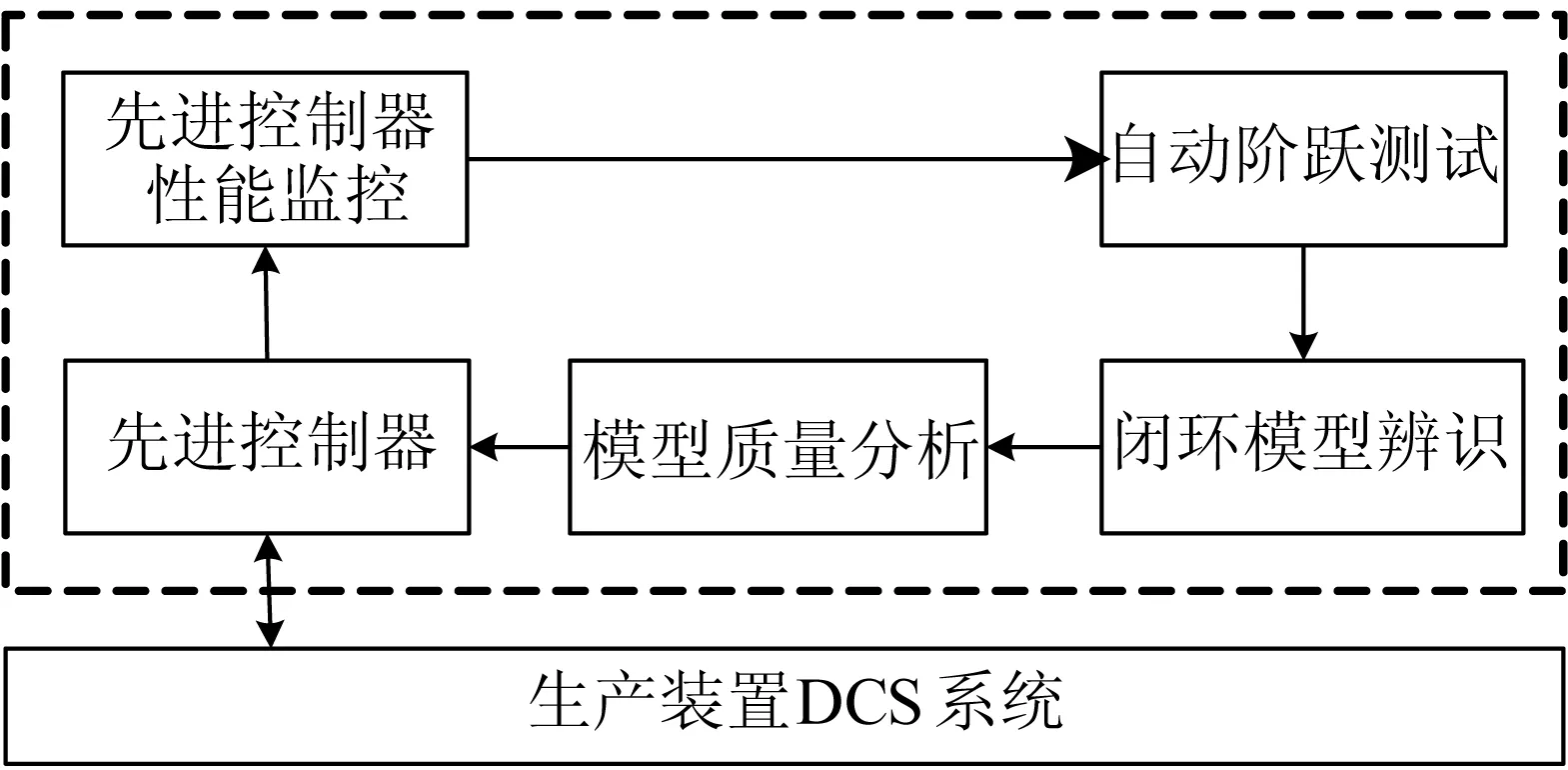
图2 自适应辨识系统基本构架
2.2 系统功能
传统维护控制器的方法是通过人工现场收集数据、进行模型辨识、修改模型参数,会产生很大的人工成本和时间成本。自适应辨识系统在确保DMCplus多变量控制器经济效益的前提下,通过操纵变量MV小幅度变化,完成用于“校准模式”下的装置自动阶跃测试;进而实现模型自动校正。主要功能如下:
通过自动阶跃测试及模型辨识,降低潜在的人工成本和时间成本;
与传统阶跃测试相比,自适应辨识非干扰性操作即可收集新的阶跃数据,并能识别出模型中较差的部分;
与传统模型辨识相比,自适应辨识可以自动识别坏数据并剔除;
自动生成系列候选模型,技术人员可以根据装置的实际情况选择优质模型;
更新控制模型时不需要关闭控制器,并确保更新期间控制器的鲁棒运行;
使先进控制器维护成为生产运行固有和持续的一部分,而不必等待装置大修时维护;
经济效益的松弛机制,通过工艺约束条件换取自动阶跃测试数据更新控制器模型。
3 系统实现过程
在线自适应辨识系统基本实施流程如下:
(1)预测试
建立自适应辨识系统平台。主要包括在线自适应辨识系统组件的安装调试、系统组态与配置、网络通讯的布置与测试。主要控制器变量的比例、积分、微分(PID)回路调节。对先进控制系统各主要控制器变量的PID回路进行必要的检测与调节,以保证在线自适应辨识系统的正常有效运行和已有非线性转换的评价和修改,对非线性转换过程进行必要的评价与修改。
(2)自适应控制配置
自适应参数在先进控制器文件(CCF)中的配置与加载。应用在线自适应辨识系统,对CCF文件进行自适应辨识实施参数的配置、组态与加载。开启校准模式,初步自适应过程结果评估。在线自适应辨识系统开启自适应校准模式,并开始后台自动装置测试并初步评估控制器性能。
(3)自适应控制结果评估
依据Aspen Watch的KPI参数评估控制器模型质量。应用Aspen Watch组件内的KPI参数指标全面评估控制器各模型质量,评估及修改稳态优化LP策略和控制器仿真。应用在线自适应辨识系统评估与改进先进控制器各稳态优化策略。在线自适应辨识系统连续投用,持续监控先进控制器性能、自动后台装置测试、自动辨识与校正控制器模型等。
4 应用情况
在线自适应辨识系统建成后,在中国石化上海石油化工股份有限公司(以下简称上海石化)3#柴油加氢和2#乙二醇两套生产装置先进控制系统上进行了应用。在此以3#柴油加氢装置先进控制系统为例,阐述运用在线自适应辨识系统自动校正控制模型的过程和效果。
4.1 自适应辨识应用前的模型
3#柴油加氢装置技术改造时新增了一台反应器,并更换了催化剂。由于工艺过程发生变化,导致模型出现偏差,多个控制模型增益变得不够准确。因此在此装置中部署在线自适应辨识系统,对先进控制系统中各控制模型(控制器)进行辨识和校正。
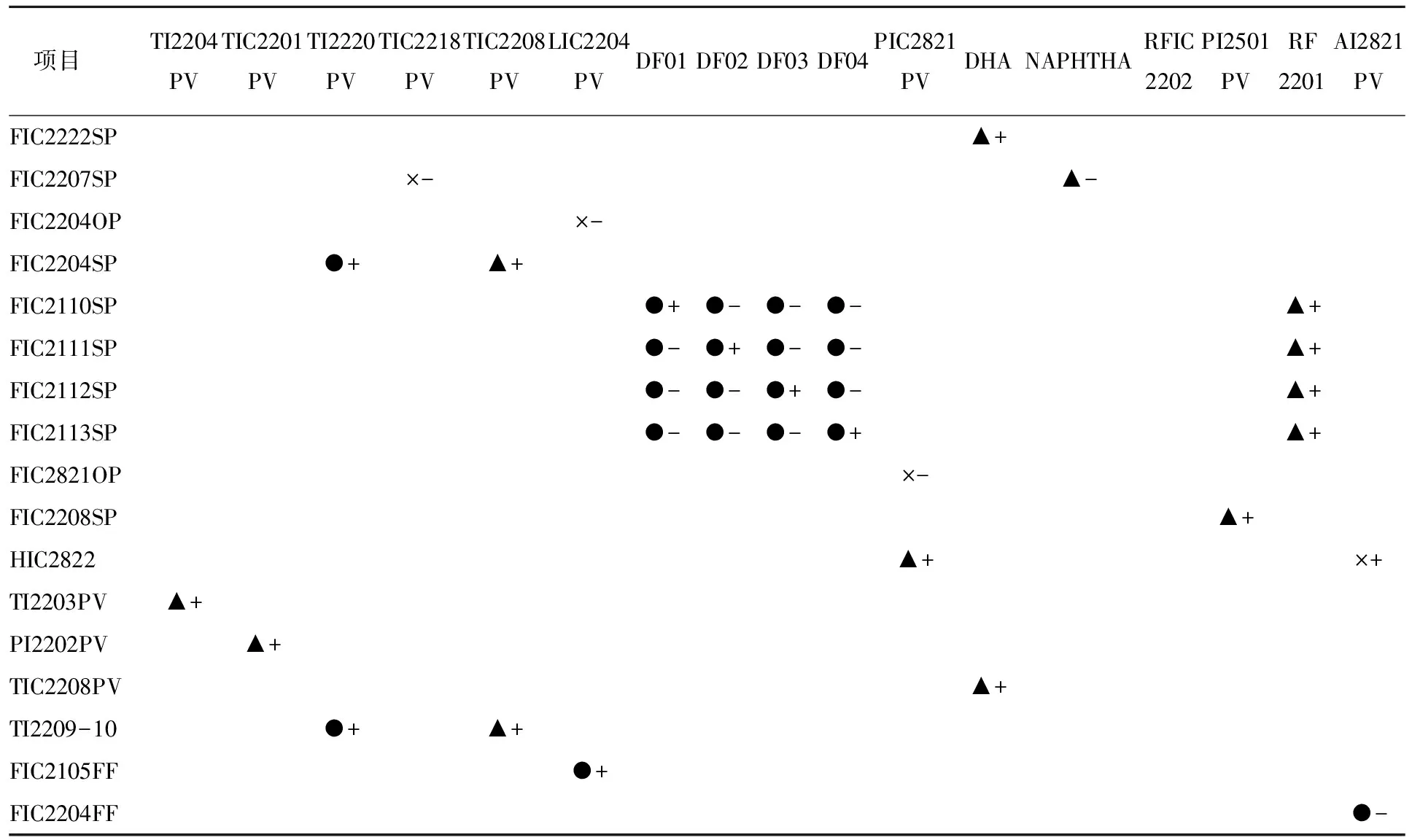
以3#柴油加氢装置分馏塔与脱硫控制器C3模型为例,利用模型质量分析模块,通过可视化界面展示模型的质量(见表1,其中横向栏目为控制器的被控变量CV,竖向栏目为操作变量MV和前馈变量FF)。CV与MV、FF之间的变量关系用“+”、“-”表示,“+”表示两者关系为正作用,“-”为负作用,空白表示变量之间无关系;符号“●”、“▲”、“×”代表模型质量的好坏程度,“●”表示好,“▲”表示较好,“×”表示坏,只要带有“×”的模型质量都是比较差的。
由表1可以看出,图中“×”有5个之多,已经严重影响到控制器性能稳定,需要校正。

表1 自适应辨识前的分馏塔与脱硫控制器C3模型
续表1
4.2 模型自适应辨识实现过程
4.2.1 自动阶跃测试
自动阶跃测试在不影响控制器性能及控制效益的情况下获取测试数据,并在线校准模型,从而在保持先进控制器的高性能的同时降低先进控制系统维护成本。基本步骤如下。
(1)加载3#柴油加氢装置分馏塔与脱硫控制器C3模型,并完成自适应建模初步配置。
(2)在C3控制模型主界面中,将DMCplus更改为“校正模式”,并将校准比例因子CR设置为0.1,此设定值含义如下:
① 如果DMCplus稳态线性规划目标函数与操作变量最小变化模式目标函数的差值小于CR设定值0.1所对应的允许差值,则自动实施操作变量MV小幅度阶梯状变化即开环装置阶跃测试,以在保持先进控制效益的前提下获取无成本的测试数据,用于校正模型;
② 如果DMCplus稳态线性规划目标函数与操作变量最小变化模式目标函数的差值大于CR设定值0.1所对应的允许差值,将按照传统模式下DMCplus稳态线性规划计算MV及CV稳态优化目标值,进而计算出操作变量动态控制变化值,进行DMCplus多变量模型预测控制。
(3)打开C3控制模型中需要进行自适应建模的MV变量的测试开关。
(4)开启自动去除坏数据(Auto Slice)及自动辨识模型(Auto ID)功能,并设置Auto ID每1小时运行一次。
4.2.2 闭环模型辨识
自动阶跃测试采集到足够多的变量数据(一般需要一个月以上数据)后,即可通过模型辨识功能新建并运行模型辨识任务,得到新模型辨识数据。
限于篇幅,现选取TI2203PV(FF)与TI2204PV(CV)作为“模型校正”范例(见图3)。
由图3可以看到:原模型增益明显小于模型辨识结果,以此原模型作为TI2204PV前馈则会造成TI2204PV预测值过低,模型产生偏差,遂将此模型进行升级,即用新模型替代。
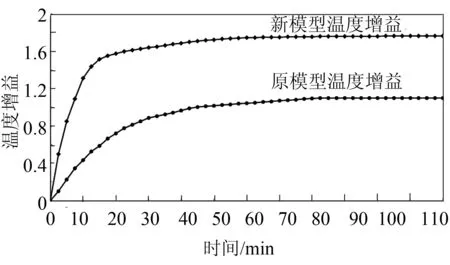
图3 两种模型温度增益对比
4.2.3 模型质量分析
闭环模型辨识完成后,在线自适应辨识系统模型评估功能有频率分析和MV相关性分析两种方式,对更新的控制模型进行质量分析。
频率分析分A、B、C、D等4个标准,A代表模型质量最高,依次递减,D代表质量最差。自适应辨识范例TI2203PVvs.TI2204PV应用频率分析方式分析模型质量改善情况,结果显示模型质量由C变为A,模型质量改变明显。
MV相关性分析以正态分布形式显现,共有“<50%(好,集中于峰值)”、“>50%(一般)”和“>80%(差,扁平分散)”三种类型,正态分布越集中于峰值,MV相关性越好,反之越差。自适应辨识范例TI2203PVvs.TI2204PV应用MV相关性分析,结果显示新模型正态分布(<50%)与原模型(>80%)相比明显集中于峰值,模型质量得到明显改善。
4.3 自适应辨识应用后模型
表2是应用自适应辨识系统得到的分馏塔与脱硫控制器C3新模型,可以看到其中“●”增多,“▲”减少,“×”消除,模型质量整体上得到明显提高。
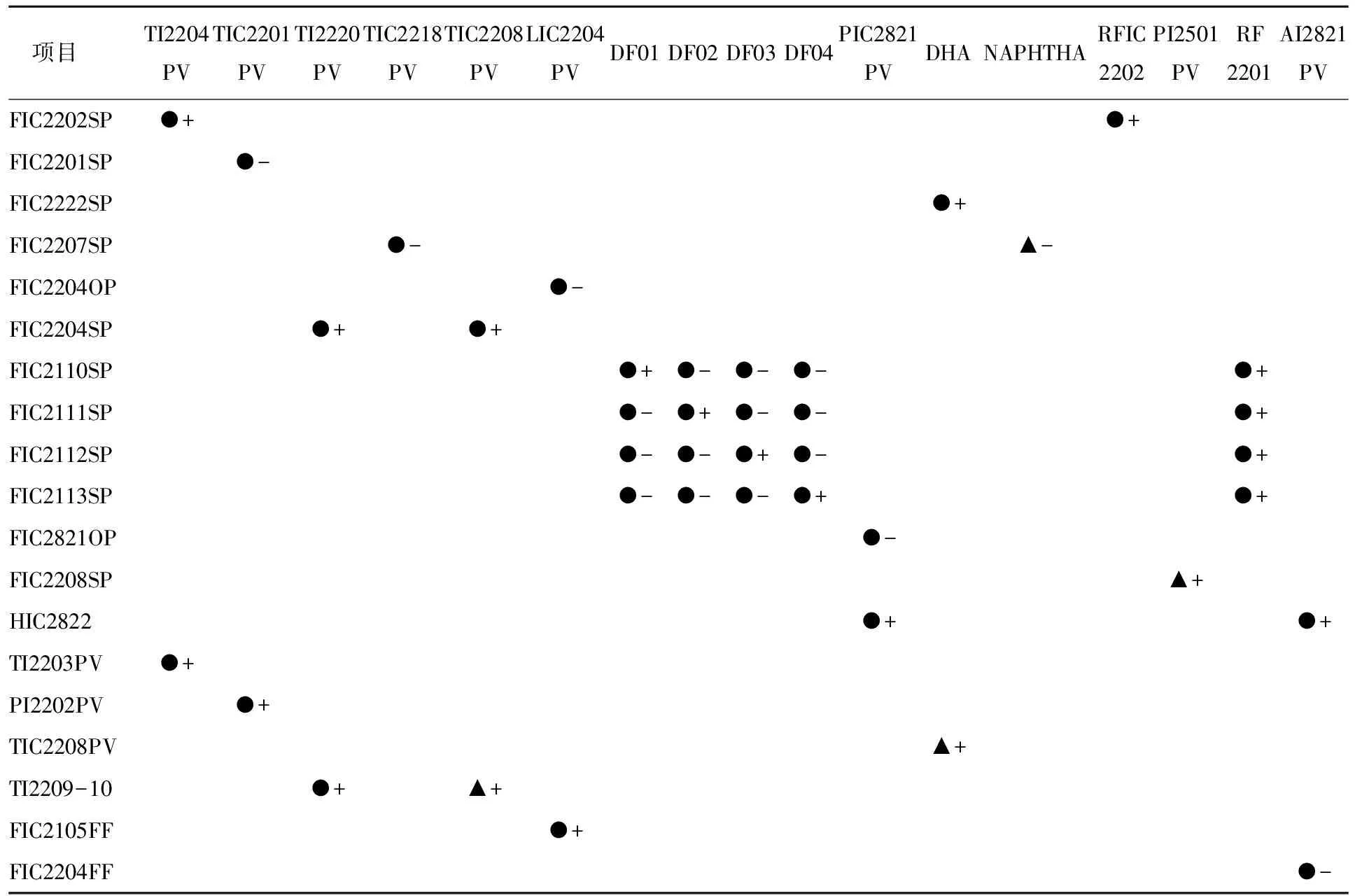
表2 自适应辨识后的分馏塔与脱硫控制器C3模型
5 应用成效
5.1 经济效益
上海石化3#柴油加氢装置新增一台精制反应器和2#乙二醇装置更换高活性催化剂为高选择性催化剂后,由于工艺过程发生变化,导致该两套装置的先进控制模型出现偏差,多个控制模型增益变得不够准确。应用在线自适应辨识系统对其20个模型进行了修正更新,自动调整模型增益、滞后时间等参数,得到了高品质的模型。模型更新后被控变量的标准差平均降幅15%以上,模型的精确性和控制器的效果都明显增强,系统综合投用率持续保持99.90%以上的高水平。该两套先进控制系统的年总效益是910万元,如果工艺工况变更导致先进控制失效,上述效益将不能保持。
5.2 提高管理水平
在线自适应辨识系统改变了先进控制系统维护工作的方法,将控制器性能降低后需进行装置再测试、模型重新辨识与校正的人工维护过程,转变为连续无间断、无需人工干预的自动过程,维护和改进先进控制模型所需要的工作量降低30%以上,解决了工艺工况、原辅料变化等变动给模型维护工作带来的挑战,使控制器一直运行于代表实际工艺工况的最优状态,创建了先进控制系统运维最佳实践。
6 结语
在线自适应辨识系统的应用实现了先进控制模型自动校正从理论到实际应用的突破。文章介绍了自适应控制的机理和实现过程,总结了系统的操作方法,通过对先进控制器进行自整定,快速获得可靠、有效的模型,实现先进控制系统的高效运行。
为提升并保持在线自适应辨识系统带来的经济效益,需要有经验的技术人员根据控制器具体情况去制定相应策略和参数设置。控制器的长周期稳定、高效运行除了系统维护技术人员的监控、控制模型与策略的及时调整外,更加需要工艺和操作人员密切关注、及时调整控制器的操作范围。
