基于激光多普勒技术的三维扫描测振研究
2018-05-16宋耀东杨兴刘志方刘红魏宋云峰
宋耀东,杨兴,刘志方,刘红魏,宋云峰
(宁波舜宇智能科技有限公司,浙江宁波 315400)
0 引言
随着现代工程技术的飞速发展,特别是航空、航天、机械制造等技术的发展,需要对振动进行高精度测量,如对航空发动机叶片振动测量、火炮发射炮管振动测量、微机电系统振动测量等。传统的振动测量采用接触式,但传感器本身的负载会对振动测量的结果产生影响。20世纪60年代发展起来的激光多普勒技术非接触振动测量大大丰富和先进了测量手段。
LDV是利用激光多普勒效应和外差干涉原理[1-3]进行的精密振动测量技术,具有精度高、动态响应快、测量范围大、非接触性测量、抗电磁干扰、对横向振动干扰不敏感等优点,因此本文选取激光多普勒方法进行振动检测。
单点的LDV只能测量沿着激光出射方向的振动,扫描LDV可测量一定区域面内的振动。而在实际工业环境中,往往需要获取某个被测物一定区域三维振动的信息,为后期的模态分析提供数据准备。因此,三维扫描LDV显得很有必要。
1 三维扫描基本原理
本三维扫描系统由3台单点LDV、3套振镜、2套视频采集系统及信号解调、数据采集等组成,3台单点LDV布置在空间中的3个位置,在3台单点LDV前方各布置1套振镜,用于实现激光的偏转,视频采集系统用于控制3台单点LDV的定点同时测量以及空间相对位置关系的计算。
3台LDV分别从各自振镜出射与世界坐标系x、y、z的夹角分别为αkj、βkj、γkj,k=1,2,3.....;j=1,2,3。沿着激光出射方向,测得的速度为νkj,k=1,2,3.....;j=1,2,3;进而得到三维振动信息(νxk,νyk,νzk,k=1,2,3.....)。

图1 三维测量原理图
以下介绍测量某点的三维信息[4-6]。图1为三维测量的原理图,第k点处νk1、νk2、νk3通过算法处理得到空间矢量,分别用νxk、νyk、νzk表示,写成如下形式:

该点的振动信息便可以在世界坐标系中用3个正交的分量表示。在上式中,νk1、νk2、νk3为单点LDV测量的值。
只要确定夹角便能计算出三分量,而夹角的测量可通过双目立体视觉[9-15]重建三维技术得到,νk1、νk2、νk3为沿着激光出射方向测得的振动分量,αkj、βkj、γkj为νkj与xj,yj,zj的夹角,夹角可通过以下公式计算出:

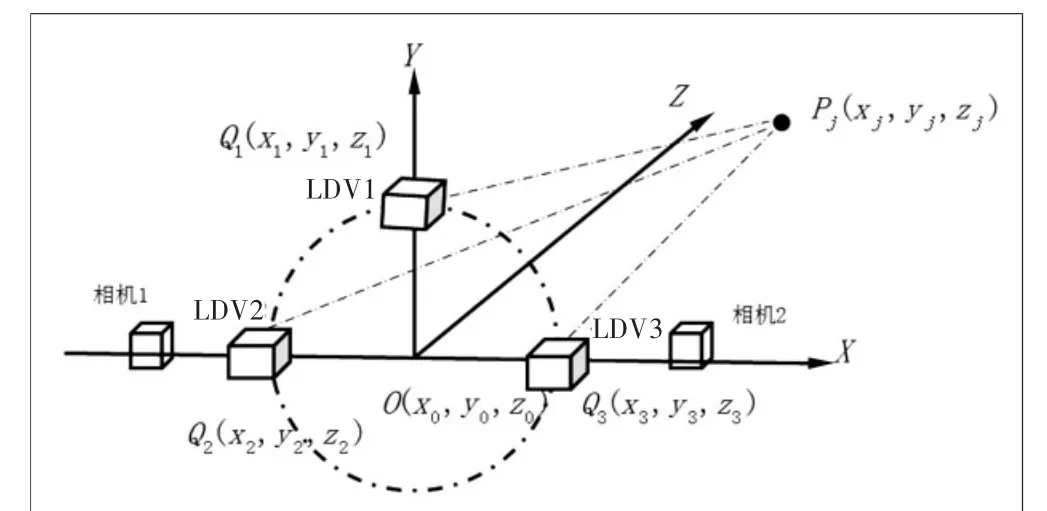
图2 角度计算原理图
其中:Xk、Yk、Zk为第k个点在世界坐标系中的坐标;Xkj、Ykj、Zkj为激光从第j个LDV前端振镜出射的激光坐标。Xk、Yk、Zk可通过双目立体视觉得到,双目立体视觉目前已是成熟技术,广泛应用在三维重建领域;Xkj、Ykj、Zkj可通过反馈的振镜偏转角度计算得出。
2 三维扫描工作步骤
1)仪器启动初始化时,各振镜自锁,偏转角度为0°,激光平行出射;2)通过视频采集系统,在视频显示区域会出现3个激光光点,对应3台单点LDV,标记激光光点,并计算到目标位置的相对坐标,换算成对应振镜旋转的角度,使3个光点重合(如图3,中间白的圈为目标位置,不同灰度的圆点为激光平行出射的光点);3)绘制扫描网格,在目标位置上划分网格,确定扫描点数和扫描方式;4)振镜根据确定的扫描点数和扫描方式来偏转相应的角度;5)每扫描一个点,图像会检测光点是否重合,有无聚焦到最佳位置,如达到阈值,则进入下一个点,如未达到,振镜及聚焦马达会做进一步微调,直到达到阈值范围之内;6)检测完成后,进行信号采集,输入后端电路解调,得到振动信息。
图3 激光光点控制示意图
3 实验过程及结果
在振动台前振动体上固定一方形塑料板,规定方形板的法向方向为Z轴方向,X、Y方向平行于板所在平面,振动台的振动方向与X、Y、Z轴均有夹角,方形塑料板大小为80 mm×80 mm×1 mm,在板上标记矩阵3×3,间距为30 mm的9个点,开启振动台,设定不同的频率及速度幅值,使其进行振动。分别用三维扫描LDV和3个正交方向上的单点LDV测量板上9个点的三维振动,记录4组数据如表1~表4所示。
从测量数据看出,测量的9个点中,处于边缘处的第1、3、7、9点振动幅值最大,处于中间的第5个点振动幅值最小,符合物理规律;另外,从三维扫描LDV测量的数据与3个正交方向测量的数据比较,相对测量误差均小于3%,且此处的误差主要源于两种测量方式不对正,角度引起的误差。从数据上看,仪器无论在功能还是性能上均实现了三维精密测振的要求。
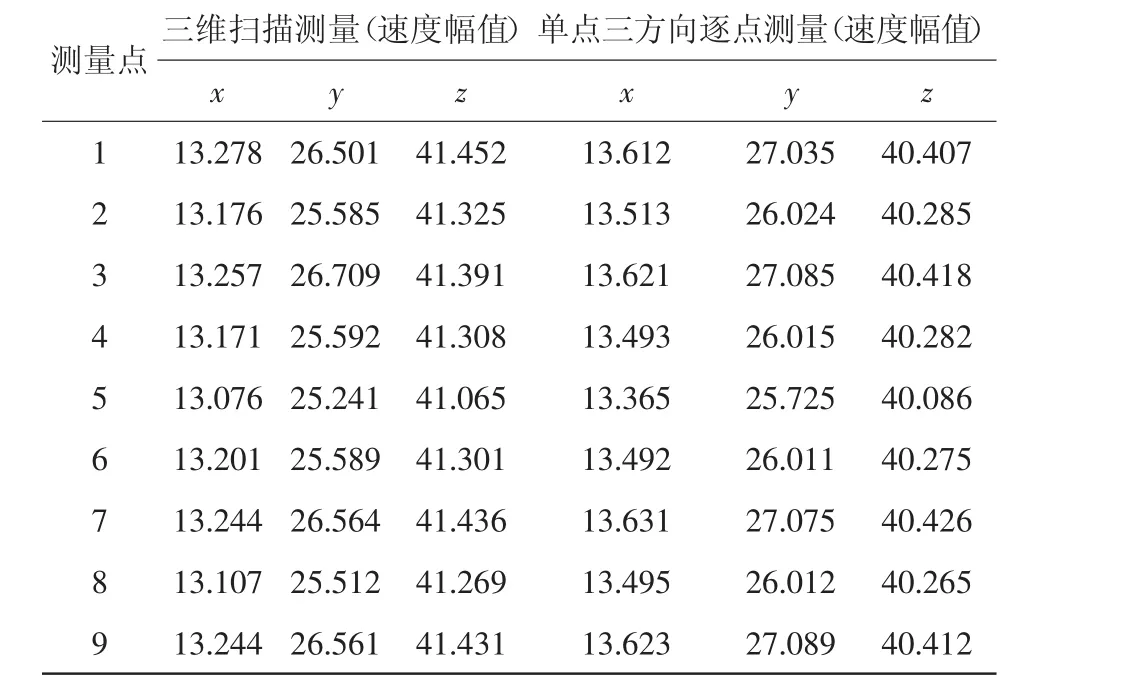
表1 频率80 Hz、速度幅值50 mm/s测量结果

表2 频率80 Hz、速度幅值10 mm/s测量结果

表3 频率160 Hz、速度幅值50 mm/s测量结果

表4 频率160 Hz、速度幅值 10 mm/s测量结果
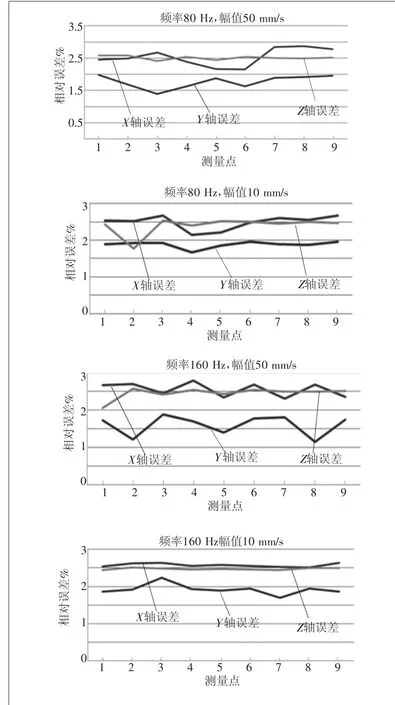
图4 两种方式测量的相对误差

图5 振动台测量点标记

图6 三维扫描激光测振光学头

图7 三维扫描测振试验系统
4 结论
在研究三维振动分析及扫描激光测振仪的基础上,完成了三维测振与扫描技术的结合,实现了三维扫描测振。本文只在理论及实验上论证了可行性,后期还需在测量精度上着力提升仪器性能,主要从电路处理、算法优化、双目角度测量方面着力加强。
[参 考 文 献]
[1] 王文生.干涉测试技术[M].北京:兵器工业出版社,1992.
[2] 金国藩,李景镇.激光测量学[M].北京:科学出版社,1998.
[3] 马军山,孙晓明,禹延光,等.激光自混合干涉测量技术综述[J].宇航计测技术,1997(6):1-7.
[4] DRAIN L E.激光多普勒技术[M].北京:清华大学出版社,1985.
[5] KHALIL H,KIM D,NAM J,et al.Accuracy and noise analyses of 3D vibration measurements using laser Doppler vibrometer[J].Measurement,2016,94:883-892.
[6] 王炜辰.三维激光测量仪的关键技术研究[D].长春:吉林大学,2015.
[7] 于梅.三轴向振动加速度校准系统的研究[J].计量学报,2010,31(6):517-519.
[8] SEEVE J V,GUILLAUME V.Acoustic source identification using a scannig laser doppler vibrometer[J].Optics and Lasers in Engineering,2007(45):742-749.
[9] 罗丹,廖志贤.基于OpenCV的双目立体视觉测距[J].大众科技,2011(4):52-53.
[10] 刘盼,王金海.基于平行双目立体视觉的测距系统[J].计算机应用,2013,32(增刊2):162-164.
[11] 曲学军,张璐,张凌云.基于新的成像模型的摄像机标定与三维重建[J].仪器仪表学报,2011,32(8):1830-1836.
[12] 夏茂盛,孟祥磊,宋占伟,等.基于双目视觉的嵌入式三维坐标提取系统[J].吉林大学学报(信息科学版),2011,29(1):61-66.
[13] 于勇,张晖,林茂松.基于双目立体视觉三维重建系统的研究与设计[J].计算机技术与发展,2009,19(6):127-131.
[14] 常淑华,宋艳秋,杨永敏.双目立体视觉匹配的预处理技术[J].吉林大学学报(理学版),2012,50(1):95-100.
[15] 李旭港.计算机视觉及其发展与应用[J].中国科技纵横,2010(6):42.
