振动加速度信号时域和频域积分方法研究
2018-05-16周华
周华
(航空工业直升机所,江西景德镇 333001)
0 引 言
振动是直升机的永恒话题,振动问题相比固定翼飞机更为突出。直升机的振动特性是由若干定频和随机宽频背景噪声信号叠加而成。飞机上不同部件对振动的判断标准不一,例如传动系统转动部件一般以振动速度作为判据;发动机则通常在不同频段内分别以振动加速度、振动速度、振动位移进行规定;驾驶舱、操纵线系等机体部位同样也以3种振动参数进行分别规定。
在实际测试中,鉴于传感器大小、重量、测试成本、传感器安装环境等条件限制,大多数情况不可能同时测量振动加速度、速度和位移3种参数。由于微分处理的近似方法误差较大,且加速度传感器通常体积小、重量轻、灵敏度高、有效频带宽等优点,除了一些对振动位移或速度有明确规定的部位,加速度传感器在振动测试中应用更为普遍。
振动加速度转换为速度或位移,一般可在时域或频域内进行积分处理。需要注意的是,由于测试仪器温度变化等原因,加速度信号中不可避免存在零点漂移、趋势项等特征,若进行二次积分生成位移,则又会产生新的趋势项和直流量。
假设加速度信号为a(t),速度积分公式为
其中,C为常数项。
位移积分公式为:


式中:Ct为一次积分后的直流分量产生的新的一次趋势项;D为新的直流分量。如何正确消除趋势项和直流分量等的影响,对积分的精度影响很大。
本文给出时域和频域内振动加速度和速度、位移转换较为实用的方法,并在时域内对两种积分方法进行对比验证,且验证了积分结果的频域特性,对提高振动信号处理分析能力起到较大的推动作用。
1 时域内积分处理方法
以往的时域积分方法多是基于离散信号的累计梯形法则(线性)、辛普森法则(二次抛物线)等的数值求积,然后控制截断误差,保证求积的收敛性即可。
然而由于每一次积分后,都会出现新的趋势项和直流量,低频趋势项对积分的结果影响很大,二次积分后往往信号可能会畸变甚至完全失真。另外,时域内去趋势项也会造成信号能量的损失。因此,传统的时域数字积分精度往往较低。
比较可行的时域内积分方法如下:
在积分之前,若加速度信号中有明显的直流、高频随机噪声等,应先进行处理。例如用五点三次平滑法对时域信号作平滑前处理。
首先用辛普森(或梯形等)法则进行积分,速度和位移计算公式如下:
式中:i=0,1,…N-1;Δt为采样时间,当i-1<0时,该点值为0。
计算速度和位移积分能量Venergy和Senergy:

将速度或位移积分结果用减均值或多项式最小二乘法去除趋势项:

到式(9)为止,速度积分已完成。对于位移积分,除了进行去趋势项处理外,还需进行去除高次项处理。
高次项可用多项式拟合法来进行去除,即根据时域曲线运用Gauss计算拟合得到多项式系数:

式中:n为多项式次数(一般用2次即可),[b0,b1,...,bn]为拟合后的多项式系数,X为时间轴。

式(9)和式(12)即是去除高次项后最终速度和位移积分结果。
2 频域内积分处理方法
频域内积分是将信号由时域转换到频域内进行处理,即可操作上避免时域内多次积分需多次去趋势项的繁琐,也可避免去趋势项造成能量损失的累计误差。时域与频域之间转换采用快速傅里叶变换。傅里叶变换的积分定理为

由式(13)可知,当ω<1,即f<1/2π时,信号会放大,因此在不需要的频段可人为置零,即人为进行低频滤波。
进行FFT变换后,为方便处理,将零频点(直流分量)移至频谱的中间,使经过FFT得到的实部和虚部数据与频率对应起来,变成我们常见的频谱图排序。

由上面两式可知,速度和加速度相位相差90°,位移和加速度相位相差180°。
完成上述步骤后,将零频点移至频谱的起始位置,以与FFT结果一致,最后再进行FFT逆变换得到时域量值。需要注意的是,速度积分完成后,仍需按式(5)进行去趋势项处理。位移积分做完频域内积分,除了去趋势项处理外,也需进行式(11)和式(12)所示的去除高次项处理。
3 实例验证
3.1 时域和频域积分的符合性验证
以某部件振动台数据为例。在额定工作状态,特征振频是固定的。典型的振动加速度信号如图1所示。
根据第1节和第2节的内容,分别进行时域和频域内积分,两种积分的结果对比情况见图2和图3。

图1 典型振动信号时域特征

图2 时域和频域内速度积分

图3 时域和频域内位移积分
由图2和图3可知,时域和频域内积分结果一致性较好。
3.2 积分结果的频域特性验证
取某段振动数据为例,其时域和频域特性见图4。含有2个主频,5.25 Hz(加速度1.0g)、47.25 Hz(加速度2.0g)。
将其进行积分,速度和位移积分结果见图5和图6。
将积分结果进行FFT分析,结果见图7和图8。
可以用如下公式对速度和位移的量值进行简单评估:

图4 典型振动曲线

图5 速度积分结果
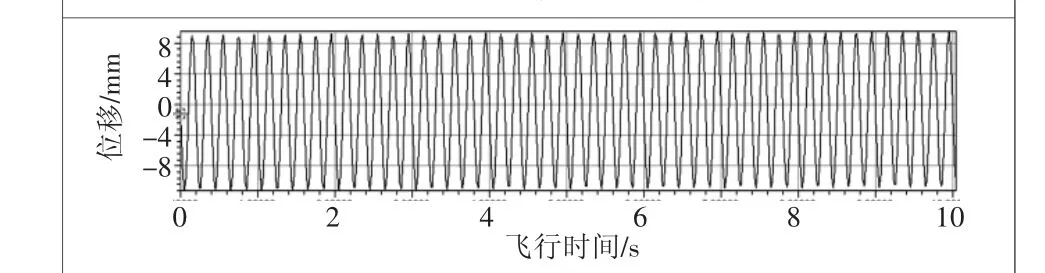
图6 位移积分结果

表1 理论值和积分结果对比


图7 速度积分FFT结果

图8 位移积分FFT结果
理论和实际积分结果对比见表1。
由表1可知,积分结果符合性较好,低频段符合性比高频段要稍差,但误差也在10%以内,满足实际工程需求。
4 结论
本文所述的时域和频域积分方法,两者在时域相似性以及频谱特性方面,都有较好的效果,可以用于实际工程应用。
[参考文献]
[1] 冯康.数值计算方法[M].北京:国防工业出版社,1978.
[2] 王济,胡晓.MATLAB在振动信号处理中的应用[M].北京:中国水利水电出版社,2006.
[3] 李智勇.基于频域积分的振动信号处理方法[J].汽车科技,2009(5):28-30.
[4] 徐庆华.试采用FFT方法实现加速度、速度与位移的相互转换[J].振动、测试与诊断,1997(4):30-34.
